



一、单选题
1、同一斜面上,两个物体同时下滑,下列正确的是?
A 重量大的物体向下的压力大
B 重量小的物体向下的压力大
C 重量小的物体不受摩擦力作用
D 斜面越粗糙,两物体所受的摩擦力越小
2、以下关于重力的说法正确的是?
A 小的物体不受重力作用
B 重力的方向竖直向上
C 重力的作用点是物体的重心
D 把同一块橡皮泥捏成不同形状,重力的大小也会不同
3、电动机是将( )能转化为( )能的装置?( )
A 电,机械
B 热,电
C 电,热
D 化学,电
4、如图这是滑杆机构,滑块B做什么动作?

A 回转动作
B 在轨道上滑动
C 上下摆动
D 固定不动
5、如果物体静止在斜面上,则该物体受到的力不包括?
A 自身的重力
B 斜面的支持力
C 摩擦力
D 弹力
6、当前正在研究的智能机器人属于第几代机器人?
A 第一代
B 第二代
C 第三代
D 第四代
7、我国家庭用电器的标准电压是多少伏?
A 110V
B 220V
C 12V
D 36V
8、机器人三原则”是由____提出的?
A 卡尔.恰佩克
B 阿西莫夫
C 雨果
D 列夫.托尔斯泰
9、凸轮机构的从动件类型不包括?
A 尖顶从动件
B 滚子从动件
C 圆顶从动件
D 平底从动件
10、下图是什么机械机构?
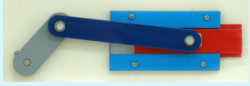
A 曲柄滑块机构
B 曲柄摇杆机构
C 双曲柄机构
D 双摇杆机构
11、下列选项中,没有用到连杆机构的是?

A a
B b
C c
D d
12、一辆八轮装甲车,左侧四个轮子转速是200rpm,右侧四个轮子转速是100rpm,则此装甲车?
A 向前直走
B 向左前方转向
C 向右前方转向
D 原地不动
13、以下对凸轮机构中从动件运动轨迹和规律没有影响的是?
A 凸轮的颜色
B 凸轮转动的快慢
C 凸轮的轮廓曲线
D 从动件的运动方式
14、以下机构中,安装方向必须在同一平面内的是?
A 啮合的齿轮
B 传动链和链轮
C 皮带和带轮
D 蜗轮蜗杆
15、按照凸轮的形状对凸轮机构分类,不包括下列哪一项?
A 盘形凸轮
B 滚子凸轮
C 圆柱凸轮
D 移动凸轮
16、滑杆机构中回转体做什么运动?
A 左右摆动
B 上下滑动
C 回转运动
D 左右滑动
17、“木牛流马”是谁发明的?
A 苏颂
B 诸葛亮
C 张衡
D 鲁班
18、自行车主要应用了哪种机构传动?
A 棘轮
B 传动链
C 皮带
D 槽凸轮
19、以下选项中不属于皮带传动连接方式的是?
A 平行传动
B 交叉传动
C 半交叉传动
D 平行啮合
20、伯努利定理是指物体表面流体流速越快那么物体所受的压强越小,该原理可以解释下列哪个现象
A 向靠近的且相互平行的两张纸中间吹气,两张纸往里合
B 吹风扇时人会感到凉爽
C 冬天在屋里向玻璃上哈气会在玻璃上形成小水滴
D 对一个物体施力,可能会改变物体的运动轨迹
21、以下选项中,最适合机器人行走的机构是?
A 连杆机构
B 齿轮机构
C 棘轮机构
D 凸轮机构
22、以下选项中对前轮驱动和后轮驱动说法正确的是?
A 前轮驱动车前轮是主动轮
B 前轮驱动车后轮是主动轮
C 前轮驱动车前轮承担转向和驱动功能,转向会过度
D 后轮驱动起步加速表现较差
23、如图下列哪项不属于该棘轮机构?

A 主动摆杆
B 棘轮
C 主动棘爪
D 止回棘爪
24、组成凸轮机构的构件不包括?
A 凸轮
B 从动件
C 机架
D 滑块
25、以下哪个不是棘轮机构?
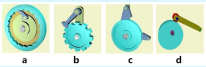
A a
B b
C c
D d
26、以下不能精确传递动力的是?
A 齿轮平行啮合
B 齿轮垂直啮合
C 皮带传动
D 链传动
27、下列关于传动方式说法正确的是?
A 齿轮传动精度比皮带传动高
B 齿轮传动的传动比无法计算
C 链传动的传动比无法计算
D 齿轮传动比皮带传动更适合远距离传递动力
28、关于平面连杆机构说法正确的是?
A 连杆机构中杆越多,动作越精确
B 杆的连接处属于点和面的接触,是高副机构
C 制造精度较高,制造相对简单
D 易于实现复杂的运动规律
29、以下哪个不属于棘轮机构的分类?
A 外啮合棘轮机构
B 内啮合棘轮机构
C 齿式棘轮机构
D 盘形凸轮
30、以下各项中,不属于皮带传动特点的是?
A 可以应用于传送带
B 能保护机械
C 适合远距离传递动力
D 动力传递精准
二、多选题
31、两物体之间产生摩擦力必须具备的条件有哪些?
A 两物体相互接触
B 两物体有相对运动或相对运动趋势
C 两物体大小一致
D 两物体材料一致
32、典型的棘轮机构由哪些构件组成?
A 棘轮
B 主动摆杆
C 止回棘爪
D 主动棘爪
33、影响“力”的效果的重要因素包括?
A 力的大小
B 力的方向
C 力的作用点
D 力的状态
34、如图关于该机构说法正确的有哪些?

A 这是槽轮机构
B a是主动件
C b是从动件
D 这是凸轮机构
35、皮带传动的缺点有哪些?
A 传动时间有延缓
B 传动时有能量的损失
C 传动不够精确
D 不适合远距离传动
三、判断题
36、皮带在传递动力的过程中会产生延迟。
A 正确
B 错误
37、凸轮机构是一种高副机构。
A 正确
B 错误
38、世界上第一台可编程机器人是由美国人乔治德沃尔制造的。
A 正确
B 错误
39、任何机械都不省功。
A 正确
B 错误
40、链传动中的链轮旋转方向相同。
A 正确
B 错误
41、齿轮传动可根据齿数计算传动比
A 正确
B 错误
42、轮子上的花纹是为了减小摩擦力。
A 正确
B 错误
43、现代机器人发展一共经历了三代。
A 正确
B 错误
44、摩擦力产生时物体一定发生了相对运动。
A 正确
B 错误
45、 在复杂机构中,一般与电动机逻辑关系最近的是主动件
A 正确
B 错误
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




