一、单选题
1、SPI 通信中,从机选择引脚为?
A SCLK
B MOSI
C MISO
D SS
2、ESP32 主控板和 MPU6050 通过 I2C 进行数据交互,ESP32 主控板和 MPU6050 分别为?
A 主设备 从设备
B 主设备 主设备
C 从设备 从设备
D 从设备 主设备
3、下图是三相反应式步进电机工作示意图,当采用单双六拍通电方式运转时,其步距角是?
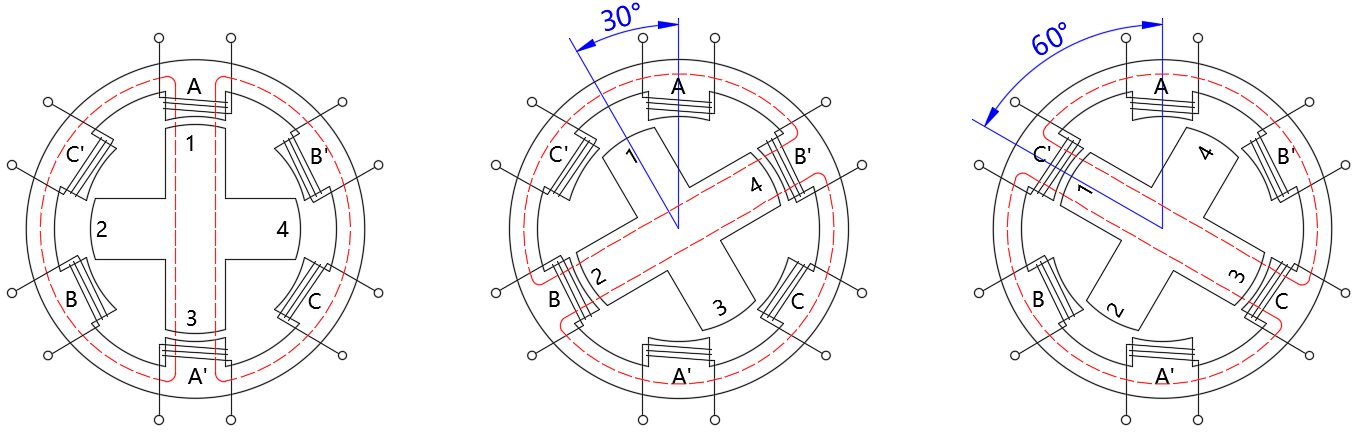
A 15 度
B 30 度
C 45 度
D 60 度
4、当前使用的 IPV4 版本的 IP 地址由几段组成?
A 4
B 8
C 16
D 32
5、PID 控制中比例控制是?
A P 控制
B I 控制
C D 控制
D ID 控制
6、关于步进电机,以下说法中错误的是?
A 步进电机转动通过电脉冲信号控制
B 步进电机转动的速度与脉冲频率成正比
C 步进电机是执行器
D 步进电机运转时,会产生误差累计
7、HTTP 协议的默认端口为?
A 20
B 21
C 25
D 80
8、IPV6 的地址长度为?
A 16
B 32
C 64
D 128
9、关于 MPU6050 姿态传感器加速度量程的说法正确的是?
A 加速度量程越大,返回的测量值精度越高
B 加速度的量程不可调整
C 加速度的返回值是十六位有符号数
D 通过加速度不能解析出姿态角
10、在 TCP/IP 通信时,率先发出信息的是?
A 客户端
B 服务器
C 客户端和服务器都可以
D DNS
11、I2C 串行通信空闲时,SDA 和 SCL 的电平分别为?
A 低电平 高电平
B 低电平 低电平
C 高电平 高电平
D 高电平 低电平
12、SPI 通信协议是?
A 同步、全双工通信协议
B 同步、半双工通信协议
C 异步、全双工通信协议
D 异步、半双工通信协议
13、用于检测 WiFi 是否连通的命令为
A ipconfig
B msconfig
C ping
D dir
14、TCP/IP 协议不包含?
A HTTP
B POP3
C FTP
D WiFi
15、I2C 串行通信,用于传送数据的是?
A SDA
B SCL
C MOSI
D MISO
16、ESP32 for Arduino 的 I2C 类库的下列成员函数中,用于向客户端发送数据的成员函数是?
A Wire.begin()
B Wire.beginTransmission()
C Wire.endTransmission()
D Wire.requestFrom()
17、ESP32 for Arduino 程序中导入 I2C 类库,相应的头文件为?
A wire.h
B Wire.h
C wring.h
D Wring.h
18、MPU6050 姿态传感器中,用于获取转动角速度的传感器单元是?
A Accelerator
B Gyroscope
C DMP
D I2C
19、执行如下程序,在串口监视器输入框输入“123abc456”后,点击“发送”,串口监视器窗口显示的内容是?
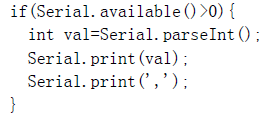
A 123,
B 123,0,456,
C 456,
D 123,456,
20、ESP32 for Arduino 的 I2C 类库的下列成员函数中,用于从客户端读取数据的成员函数是?
A Wire.begin()
B Wire.beginTransmission()
C Wire.endTransmission()
D Wire.requestFrom()
21、MPU6050 姿态传感器中,用于获取加速度原始数据的传感器单元是?
A Accelerator
B Gyroscope
C DMP
D I2C
22、下图是三相反应式步进电机工作示意图,当采用三相双三拍通电方式运转时,其步距角是?
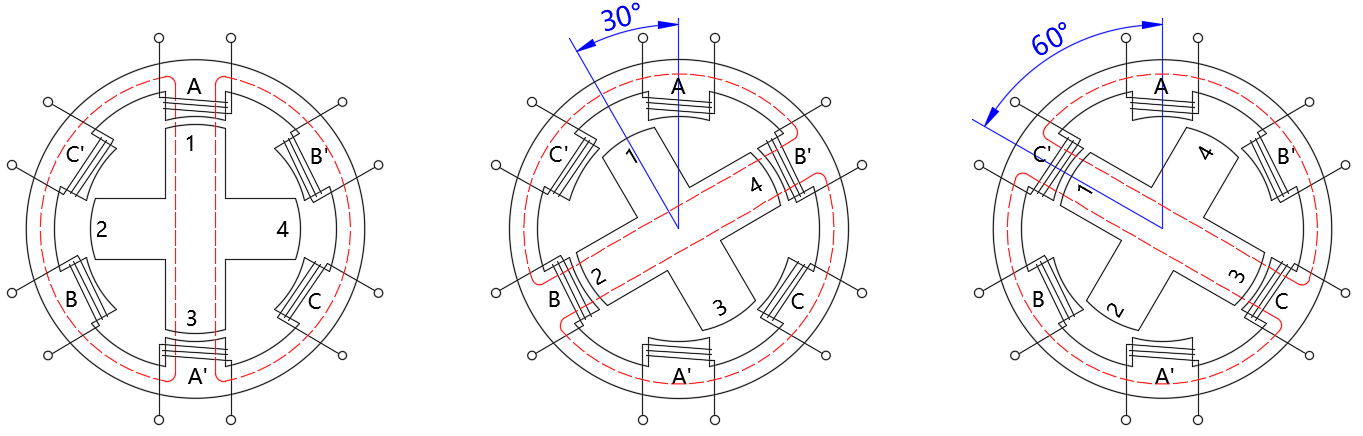
A 15 度
B 30 度
C 45 度
D 60 度
23、MPU6050 姿态传感器的加速度传感器单元可以设置如下不同的量程,其中测量精度最高的量
程是?
A ±2g
B ±4g
C ±8g
D ±16g
24、MPU6050 姿态传感器获取的原始数据,经过数据融合,获得传感器的姿态角,其中表示传感
器上下角度变化的是?
A 俯仰角
B 偏航角
C 滚转角
D 加速度
25、下列用于在浏览器选项卡中显示标题信息的标签是?
A
B
C </span></p><p>D <body></p><p>26、ESP32 主控板和 MPU6050 通过 I2C 进行数据交互,下列说法正确的是?</p><p>A 启动数据传送由 ESP32 负责,终止数据传送由MPU6050 负责</p><p> <span style="color: rgb(225, 60, 57);">B 启动数据和终止数据传送均由 ESP32 负责</span></p><p>C 启动数据和终止数据传送均由 MPU6050 负责</p><p>D 启动数据传送由 MPU6050 负责,终止数据传送由 ESP32 负责</p><p>27、I
2
C 串行通信中,数据线 SDA 的作用是?</p><p>A 发送数据</p><p>B 接受数据</p><p> <span style="color: rgb(225, 60, 57);">C 发送和接受数据</span></p><p>D 发送时钟数据</p><p>28、IPV4 的地址长度为?</p><p>A 16</p><p> <span style="color: rgb(225, 60, 57);">B 32</span></p><p>C 64</p><p>D 128</p><p>29、.SPI 通信中,主机向从机发送数据的数据线为 ?</p><p>A SCLK</p><p> <span style="color: rgb(225, 60, 57);">B MOSI</span></p><p>C MISO</p><p>D SS</p><p>30、.ESP32 for Arduino 的 I2C 类库的下列成员函数中,用于向客户端发送数据的成员函数是?</p><p>A Wire.write()</p><p>B Wire.beginTransmission()</p><p> <span style="color: rgb(225, 60, 57);">C Wire.endTransmission()</span></p><p>D Wire.requestFrom()</p><p>31、ESP32 for Arduino 提供的 WiFi 类库的成员函数 WiFi.softAP 的功能是?</p><p>A 以 STA 模式连接到 AP</p><p>B 返回 softAP 的 IP 地址</p><p> <span style="color: rgb(225, 60, 57);">C 创建一个接入点,并设置 SSID 和密码</span></p><p>D 启动 web 服务器</p><p>32、PID 控制中 I 控制是指?</p><p>A 比例控制</p><p> <span style="color: rgb(225, 60, 57);">B 积分控制</span></p><p>C 微分控制</p><p>D 闭环控制</p><p>33、有关 TCP/IP 协议下列说法错误的有?</p><p>A TCP/IP 协议是一系列协议家族的统称</p><p>B TCP/IP 协议包含了 TCP 协议和 IP 协议</p><p> <span style="color: rgb(225, 60, 57);">C TCP/IP 四层模型从底向上,依次是:应用层、网络层、传输层、网络接口层</span></p><p>D TCP/IP 协议当前 Internet 的基础协议</p><p>34、下列命令中,用于检测 WiFi 是否连通的命令是?</p><p>A ipconfig</p><p>B msconfig</p><p> <span style="color: rgb(225, 60, 57);">C ping</span></p><p>D cmd</p><p>35、中国电子学会科普中心官方网站网址为 www.kpcb.org.cn,该网址是?</p><p>A 统一资源定位符(URL)</p><p> <span style="color: rgb(225, 60, 57);">B 域名</span></p><p>C IP 地址</p><p>D 网站</p><p>36、下列部件中,不属于步进电机的是?</p><p>A 绕组</p><p>B 定子</p><p>C 转子</p><p> <span style="color: rgb(225, 60, 57);">D 换向器</span></p><p>37、关于 I2C 通信,下面说法错误的是?</p><p>A I2C 总线上的设备有主从之分</p><p>B I2C 通信是串行通信</p><p>C I2C 通信中从设备都有一个唯一的地址</p><p> <span style="color: rgb(225, 60, 57);">D I2C 通信是一种全双工通信方式</span></p><p>38、在 TCP/IP 通信中,通过 IP 地址+端口来区分不同的服务,web 服务对应的端口是?</p><p>A 20</p><p>B 21</p><p> <span style="color: rgb(225, 60, 57);">C 80</span></p><p>D 404</p><p>39、 I2C 串行通信中,当总线空闲时,SDA 和 SCL 的电平分别为?</p><p>A 低电平 高电平</p><p> <span style="color: rgb(225, 60, 57);">B 高电平 高电平</span></p><p>C 高电平 低电平</p><p>D 低电平 低电平</p><p>40、在 TCP/IP 通信中,率先发起通信请求的是 ?</p><p>A 主设备</p><p>B 服务器</p><p>C 客户端和服务器都可以</p><p> <span style="color: rgb(225, 60, 57);">D 客户端</span></p><p> </p><p><strong>二、多选题</strong></p><p>41、步进电机按照结构形式分类为?</p><p> <span style="color: rgb(225, 60, 57);">A 反应式</span></p><p> <span style="color: rgb(225, 60, 57);">B 永磁式</span></p><p> <span style="color: rgb(225, 60, 57);">C 混合式</span></p><p>D 直线式</p><p>42、PID 控制器常用的组合有哪些?</p><p> <span style="color: rgb(225, 60, 57);">A PI</span></p><p> <span style="color: rgb(225, 60, 57);">B PD</span></p><p> <span style="color: rgb(225, 60, 57);">C PID</span></p><p>D ID</p><p>43、ESP32 提供了 WiFi 功能,其提供了哪几种方式连接到 WiFi?</p><p>A HTTP</p><p> <span style="color: rgb(225, 60, 57);">B STA</span></p><p> <span style="color: rgb(225, 60, 57);">C STA+AP</span></p><p> <span style="color: rgb(225, 60, 57);">D AP</span></p><p>44、采用 SPI 进行数据通信,下列四个引脚用于数据传输的引脚有哪些?</p><p> <span style="color: rgb(225, 60, 57);">A MOSI</span></p><p> <span style="color: rgb(225, 60, 57);">B MISO</span></p><p>C SS</p><p>D SCLK</p><p>45、MPU6050 得到的姿态角包含?</p><p> <span style="color: rgb(225, 60, 57);">A pitch</span></p><p> <span style="color: rgb(225, 60, 57);">B yaw</span></p><p> <span style="color: rgb(225, 60, 57);">C roll</span></p><p>D gyroscope</p><p>46、PID 控制,常用控制方式有?</p><p> <span style="color: rgb(225, 60, 57);">A P 控制</span></p><p> <span style="color: rgb(225, 60, 57);">B PI 控制</span></p><p> <span style="color: rgb(225, 60, 57);">C PD 控制</span></p><p> <span style="color: rgb(225, 60, 57);">D PID 控制</span></p><p>47、HTML 文档结构分为?</p><p> <span style="color: rgb(225, 60, 57);">A 头部</span></p><p> <span style="color: rgb(225, 60, 57);">B 主体</span></p><p>C 标签</p><p>D 文本</p><p>48、.以下属于双工串行通信的有?</p><p> <span style="color: rgb(225, 60, 57);">A UART</span></p><p> <span style="color: rgb(225, 60, 57);">B I2C</span></p><p> <span style="color: rgb(225, 60, 57);">C SPI</span></p><p> <span style="color: rgb(225, 60, 57);">D 蓝牙通信</span></p><p>49、ESP32 主控板工作在 AP 模式时,下列哪些设备可以接入到该主控板?</p><p> <span style="color: rgb(225, 60, 57);">A 手机</span></p><p> <span style="color: rgb(225, 60, 57);">B 电脑</span></p><p> <span style="color: rgb(225, 60, 57);">C 其它 ESP32 主控板</span></p><p>D 蓝牙控制器</p><p>50、关于步进电机,以下说法中正确的有?</p><p> <span style="color: rgb(225, 60, 57);">A 步进电机转动通过电脉冲信号控制。</span></p><p> <span style="color: rgb(225, 60, 57);">B 步进电机转动的速度与脉冲频率成正比。</span></p><p> <span style="color: rgb(225, 60, 57);">C 步进电机是执行器。</span></p><p>D 步进电机运转时,会产生误差累计。</p><p> </p><p><strong>三、判断题</strong></p><p>51、步进电机旋转需要控制器驱动。</p><p><span style="color: rgb(225, 60, 57);">A 正确 </span></p><p>B 错误</p><p>52、I2C 串行通信中,SDA 数据线用于发送数据。</p><p>A 正确</p><p><span style="color: rgb(225, 60, 57);">B 错误 </span></p><p>53、TCP/IP 通信,消息响应模式为 Request-Response。</p><p><span style="color: rgb(225, 60, 57);">A 正确 </span></p><p>B 错误</p><p>54、仅通过 MPU6050 姿态传感器获得的角速度数据不能解析出姿态角.</p><p>A 正确</p><p><span style="color: rgb(225, 60, 57);">B 错误 </span></p><p>55、SPI 通信的时钟频率可以在初始化时设定。</p><p><span style="color: rgb(225, 60, 57);">A 正确 </span></p><p>B 错误</p><p>56、TCP/IP 协议是一个协议族,由众多协议组成。</p><p><span style="color: rgb(225, 60, 57);">A 正确 </span></p><p>B 错误</p><p>57、SPI 通信中,数据线 MISO 可以没有。
</p><p><span style="color: rgb(225, 60, 57);">A 正确 </span></p><p>B 错误</p><p>58、 SPI 通信比较灵活,可以自行设定采样方式和时钟频率。</p><p><span style="color: rgb(225, 60, 57);">A 正确 </span></p><p>B 错误</p><p>59、 TCP/IP 通信,消息响应模式为订阅-发布模式。</p><p>A 正确</p><p><span style="color: rgb(225, 60, 57);">B 错误 </span></p><p>60、 UART、SPI、I2C 都是串行通信。
</p><p><span style="color: rgb(225, 60, 57);">A 正确 </span></p><p>B 错误</p><p style="color: rgb(225, 60, 57);"><a href="https://www.mwst.cc">喵呜刷题:</a>让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!</p><p style="text-align: center;"><img style="height: 200px;height: 200px;" src="https://cos.mwst.cc/mwst/xcx_index_web.jpg" art></p></article><div><span></span></div><div class="bg-primary bg-opacity-5 rounded overflow-hidden relative py-4 px-3 sm:p-5 md:px-[30px] text-left z-10 mb-5 mt-6 wow fadeInUp" data-wow-delay=".1s
"><div class=""><span class="flex justify-left mb-4 text-primary text-body-color"><span>创作类型:</span><div>原创</div></span><p class="text-dark text-base leading-[16px] mb-4 text-body-color"><span>本文链接:</span><a href="https://mwst.cc/archives/1696159065136300032" class="underline" target="_blank">0理论</a></p><span class="text-sm text-body-color italic"><span>版权声明:</span>本站点所有文章除特别声明外,均采用 <a class="underline" href="https://creativecommons.org/licenses/by-nc-sa/4.0/deed.zh" target="_blank"> CC BY-NC-SA 4.0 </a> 许可协议。转载请注明文章出处。 </span></div></div><div class="flex flex-wrap items-center -mx-4 mb-12"><div class="w-full md:w-1/2 px-4"><div class="flex items-center flex-wrap mb-8 md:mb-0 wow fadeInUp" data-wow-delay=".1s"><!--[--><!--]--></div></div><div class="w-full md:w-1/2 px-4"><div class="flex items-center md:justify-end wow fadeInUp" data-wow-delay=".1s"><span class="text-sm text-body-color font-medium mr-5"> 分享文章 </span><div class="flex items-center"><a class="copy-btn mr-4 mb-2" href="javascript:void(0)"><img alt="share" src="/images/article/share.svg"></a></div></div></div></div><div><ins class="adsbygoogle" style="display:block;text-align:center;" data-ad-layout="in-article" data-ad-format="fluid" data-ad-client="ca-pub-8943690705330523" data-ad-slot="7437699059"></ins></div></div></div><div class="w-full lg:w-4/12 px-4"><div><div class="mb-10 bg-[#f3f4ff] rounded-xl relative overflow-hidden text-center py-[10px] px-10 lg:px-8 wow fadeInUp" data-wow-delay=".1s
"><p class="text-sm mt-1 font-medium pb-[10px]"><a href="/brushing" rel="noopener noreferrer" target="_blank" class="text-base font-medium hover:opacity-70 px-7 loginBtn"> 扫码免费刷真题,高频考点轻松掌握! </a></p><div class="swiper w-full"><!--[--><!--]--><div class="swiper-wrapper"><!--[--><!--]--><!--[--><div class="swiper-slide w-full relative"><img src="https://cos.mwst.cc/mwst/website/QRCode/gh_62c0fee3c831_344_2.jpg" class="rounded-xl" alt="image"><div class="absolute bottom-8 left-5"></div></div><!--]--><!--[--><!--]--></div><!----><!----><div class="swiper-pagination"></div><!--[--><!--]--></div></div><div class="flex flex-wrap -mx-4 mb-8"><div class="w-full px-4"><h2 class="font-semibold text-dark text-2xl sm:text-[28px] pb-5 relative wow fadeInUp" data-wow-delay=".1s
"> 最热门资讯 </h2><span class="h-[2px] bg-primary w-20 mb-10 inline-block"></span></div><!--[--><div class="w-full md:w-1/2 lg:w-full px-4"><div class="w-full flex items-center pb-5 mb-5 border-b border-[#F2F3F8] wow fadeInUp" data-wow-delay=".1s
"><div class="w-full max-w-[80px] h-20 rounded-full overflow-hidden mr-5"><img src="https://cos.mwst.cc/global/10/undraw_Conference_speaker_re_1rna.png" alt="image" class="w-full"></div><div class="w-full"><h4><a href="/archives/1705614631533412352" rel="noopener noreferrer" target="_blank" class="text-lg lg:text-base xl:text-lg leading-snug font-medium text-dark hover:text-primary mb-1 inline-block">JAVA工程师面试指导--猎头内部资料</a></h4><p class="text-sm text-body-color">阅读数 11891</p></div></div></div><div class="w-full md:w-1/2 lg:w-full px-4"><div class="w-full flex items-center pb-5 mb-5 border-b border-[#F2F3F8] wow fadeInUp" data-wow-delay=".1s
"><div class="w-full max-w-[80px] h-20 rounded-full overflow-hidden mr-5"><img src="https://cos.mwst.cc/global/10/undraw_Preferences_popup_re_4qk0.png" alt="image" class="w-full"></div><div class="w-full"><h4><a href="/archives/1705454334080319488" rel="noopener noreferrer" target="_blank" class="text-lg lg:text-base xl:text-lg leading-snug font-medium text-dark hover:text-primary mb-1 inline-block">常见面试问题100问!</a></h4><p class="text-sm text-body-color">阅读数 32921</p></div></div></div><!--]--></div></div><div><ins class="adsbygoogle" style="display:block;" data-ad-format="fluid" data-ad-layout-key="-6t+ed+2i-1n-4w" data-ad-client="ca-pub-8943690705330523" data-ad-slot="1433403457"></ins></div><div><span></span></div></div></div></div></div><div class="flex flex-wrap -mx-4"><!----><!--[--><!--]--></div></div></section><!--]--></main><footer class="bg-black pt-8 pb-2 relative z-20 wow fadeInUp w-full clear-both min-h-[200px]" data-wow-delay=".15s" data-v-5f659e53><div class="container" data-v-5f659e53><div class="flex flex-wrap -mx-4 px-4" data-v-5f659e53><div class="w-full sm:w-2/2 md:w-2/2 lg:w-6/12 xl:w-6/12 px-4" data-v-5f659e53><div class="w-full mb-10" data-v-5f659e53><ul class="flex flex-wrap items-left" data-v-5f659e53><li data-v-5f659e53><a href="javascript:void(0)" class="mb-6 inline-block max-w-[160px]" data-v-5f659e53><img src="/logo-text-white.svg" alt="logo" class="flex max-w-full" data-v-5f659e53></a></li></ul><p class="mb-7 text-base text-[#f3f4fe]" data-v-5f659e53> 您可以在下面这些平台中找到我们,我们会在1-2个工作日内回复。 </p><div class="mt-6" data-v-5f659e53><button class="bg-white text-blue-400 shadow-lg font-normal h-10 w-10 items-center justify-center align-center rounded-full outline-none focus:outline-none mr-2 p-3" type="button" data-v-5f659e53><img alt="微信" class="w-5 mr-1" src="/images/footer/weixin.svg" data-v-5f659e53></button><button class="bg-white text-blue-600 shadow-lg font-normal h-10 w-10 items-center justify-center align-center rounded-full outline-none focus:outline-none mr-2 p-3" type="button" data-v-5f659e53><img alt="公众号" class="w-5 mr-1" src="/images/footer/gongzonghao.svg" data-v-5f659e53></button><button class="bg-white text-pink-400 shadow-lg font-normal h-10 w-10 items-center justify-center align-center rounded-full outline-none focus:outline-none mr-2 p-3" type="button" data-v-5f659e53><img alt="小程序" class="w-5 mr-1" src="/images/footer/xiaochengxu.svg" data-v-5f659e53></button><button class="bg-white text-gray-900 shadow-lg font-normal h-10 w-10 items-center justify-center align-center rounded-full outline-none focus:outline-none mr-2 p-3" type="button" data-v-5f659e53><img alt="百度" class="w-5 mr-1" src="/images/footer/baidu.svg" data-v-5f659e53></button></div></div></div><div class="w-full sm:w-2/2 md:w-2/2 lg:w-6/12 xl:w-6/12 px-4" data-v-5f659e53><div class="flex flex-wrap items-top mb-6" data-v-5f659e53><div class="w-full sm:w-1/2 md:w-1/2 lg:w-4/12 ml-auto" data-v-5f659e53><span class="block uppercase text-[#f3f4fe] text-base font-semibold mb-4" data-v-5f659e53>关于网站</span><ul class="list-unstyled" data-v-5f659e53><li data-v-5f659e53><a href="/common/about" class="inline-block text-sm text-[#f3f4fe] hover:text-primary leading-loose mb-2" data-v-5f659e53>关于我们 </a></li><li data-v-5f659e53><a href="/common/feedback" class="inline-block text-sm text-[#f3f4fe] hover:text-primary leading-loose mb-2" data-v-5f659e53>意见反馈 </a></li><li data-v-5f659e53><a href="/common/help" class="inline-block text-sm text-[#f3f4fe] hover:text-primary leading-loose mb-2" data-v-5f659e53>使用帮助 </a></li><li data-v-5f659e53><a href="javascript:void(0)" class="inline-block text-sm text-[#f3f4fe] hover:text-primary leading-loose mb-2" data-v-5f659e53>免责声明 </a></li></ul></div><div class="w-full sm:w-1/2 md:w-1/2 lg:w-4/12" data-v-5f659e53><span class="block uppercase text-[#f3f4fe] text-base font-semibold mb-4" data-v-5f659e53>其他相关</span><ul class="list-unstyled" data-v-5f659e53><li data-v-5f659e53><a href="/vip" class="inline-block text-sm text-[#f3f4fe] hover:text-primary leading-loose mb-2" data-v-5f659e53>开通会员 </a></li><li data-v-5f659e53><a href="/common/links" class="inline-block text-sm text-[#f3f4fe] hover:text-primary leading-loose mb-2" data-v-5f659e53>友情链接 </a></li><li data-v-5f659e53><a href="javascript:void(0)" class="inline-block text-sm text-[#f3f4fe] hover:text-primary leading-loose mb-2" data-v-5f659e53>隐私条款 </a></li></ul></div></div></div></div></div><div class="mt-4 border-t border-opacity-40 py-4 lg:mt-[10px]" data-v-5f659e53><div class="container" data-v-5f659e53><div class="-mx-4 flex flex-wrap" data-v-5f659e53><div class="w-full px-4 md:w-2/3 lg:w-1/2" data-v-5f659e53><div class="my-1" data-v-5f659e53><div class="text-sm text-gray-600 text-[#f3f4fe] font-semibold py-1" data-v-5f659e53> Copyright © 2020-2026 北京明婉科技有限公司 </div></div></div><div class="w-full px-4 md:w-1/3 lg:w-1/2" data-v-5f659e53><div class="my-1 flex justify-center md:justify-end" data-v-5f659e53><div class="text-sm text-gray-600 text-[#f3f4fe] font-semibold py-1" data-v-5f659e53><a href="https://beian.miit.gov.cn/" target="_blank" data-v-5f659e53>京ICP备2022017351号-5</a></div></div></div></div></div></div></footer><a href="javascript:void(0)" class="hidden items-center justify-center bg-primary text-white w-10 h-10 rounded-md fixed bottom-8 right-8 left-auto z-[999] hover:bg-dark back-to-top shadow-md transition duration-300 ease-in-out"><span class="w-3 h-3 border-t border-l border-white rotate-45 mt-[6px]"></span></a><!--[--><div class="el-overlay el-modal-dialog" style="z-index:2001;display:none;"><!--[--><div role="dialog" aria-modal="true" aria-labelledby="el-id-1024-0" aria-describedby="el-id-1024-1" class="el-overlay-dialog" style=""><!--[--><!--]--></div><!--]--></div><!--]--><!--[--><div class="el-overlay el-modal-dialog" style="z-index:2002;display:none;"><!--[--><div role="dialog" aria-modal="true" aria-labelledby="el-id-1024-2" aria-describedby="el-id-1024-3" class="el-overlay-dialog" style=""><!--[--><!--]--></div><!--]--></div><!--]--></div></div><div id="teleports"></div><script src="/js/main.js"></script>
<script type="application/json" data-nuxt-data="nuxt-app" data-ssr="true" id="__NUXT_DATA__">[["ShallowReactive",1],{"data":2,"state":33,"once":35,"_errors":36,"serverRendered":38,"path":39,"pinia":40},["ShallowReactive",3],{"6d0fb835-9d56-44c8-b1d7-722fb3ee2043":4,"knowledge-detail-1696159065136300032":32},{"code":5,"data":6,"msg":13},200,{"id":7,"userId":8,"title":9,"slug":10,"metaKeywords":11,"topPriority":12,"isMarkdown":12,"isSecret":12,"status":12,"allowComment":8,"isOriginal":8,"isAiAuthoring":12,"templateId":12,"originalUrl":13,"likes":14,"visits":15,"wordCount":12,"thumbnail":16,"summary":9,"score":12,"isFree":8,"updateTime":17,"username":18,"formatContent":19,"commentCount":12,"comments":20,"tags":20,"categories":21,"articleHref":30,"publishDate":31},173722,1,"0理论","1696159065136300032","喵呜刷题,MWST,刷题,考试刷题,机器人技术(四级),0理论",0,"",2,723,"https://cos.mwst.cc/global/10/undraw_Online_articles_re_yrkj.png","2026-02-18 20:53:31","桃花下浅酌","\u003Cp>\u003Cstrong>一、单选题\u003C/strong>\u003C/p>\u003Cp>1、SPI 通信中,从机选择引脚为?\u003C/p>\u003Cp>A SCLK\u003C/p>\u003Cp>B MOSI\u003C/p>\u003Cp>C MISO\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D SS\u003C/span>\u003C/p>\u003Cp>2、ESP32 主控板和 MPU6050 通过 I2C 进行数据交互,ESP32 主控板和 MPU6050 分别为?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A 主设备 从设备\u003C/span>\u003C/p>\u003Cp>B 主设备 主设备\u003C/p>\u003Cp>C 从设备 从设备\u003C/p>\u003Cp>D 从设备 主设备\u003C/p>\u003Cp>3、下图是三相反应式步进电机工作示意图,当采用单双六拍通电方式运转时,其步距角是?\u003C/p>\u003Cp>\u003Cimg src=\"https://cos.mwst.cc/robotics/exam/51/image-20200801214009.png\" alt=\"\">\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A 15 度\u003C/span>\u003C/p>\u003Cp>B 30 度\u003C/p>\u003Cp>C 45 度\u003C/p>\u003Cp>D 60 度\u003C/p>\u003Cp>4、当前使用的 IPV4 版本的 IP 地址由几段组成?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A 4\u003C/span>\u003C/p>\u003Cp>B 8\u003C/p>\u003Cp>C 16\u003C/p>\u003Cp>D 32\u003C/p>\u003Cp>5、PID 控制中比例控制是?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A P 控制\u003C/span>\u003C/p>\u003Cp>B I 控制\u003C/p>\u003Cp>C D 控制\u003C/p>\u003Cp>D ID 控制\u003C/p>\u003Cp>6、关于步进电机,以下说法中错误的是?\u003C/p>\u003Cp>A 步进电机转动通过电脉冲信号控制\u003C/p>\u003Cp>B 步进电机转动的速度与脉冲频率成正比\u003C/p>\u003Cp>C 步进电机是执行器\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D 步进电机运转时,会产生误差累计\u003C/span>\u003C/p>\u003Cp>7、HTTP 协议的默认端口为?\u003C/p>\u003Cp>A 20\u003C/p>\u003Cp>B 21\u003C/p>\u003Cp>C 25\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D 80\u003C/span>\u003C/p>\u003Cp>8、IPV6 的地址长度为?\u003C/p>\u003Cp>A 16\u003C/p>\u003Cp>B 32\u003C/p>\u003Cp>C 64\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D 128\u003C/span>\u003C/p>\u003Cp>9、关于 MPU6050 姿态传感器加速度量程的说法正确的是?\u003C/p>\u003Cp>A 加速度量程越大,返回的测量值精度越高\u003C/p>\u003Cp>B 加速度的量程不可调整\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C 加速度的返回值是十六位有符号数\u003C/span>\u003C/p>\u003Cp>D 通过加速度不能解析出姿态角\u003C/p>\u003Cp>10、在 TCP/IP 通信时,率先发出信息的是?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A 客户端\u003C/span>\u003C/p>\u003Cp>B 服务器\u003C/p>\u003Cp>C 客户端和服务器都可以\u003C/p>\u003Cp>D DNS\u003C/p>\u003Cp>11、I2C 串行通信空闲时,SDA 和 SCL 的电平分别为?\u003C/p>\u003Cp>A 低电平 高电平\u003C/p>\u003Cp>B 低电平 低电平\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C 高电平 高电平\u003C/span>\u003C/p>\u003Cp>D 高电平 低电平\u003C/p>\u003Cp>12、SPI 通信协议是?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A 同步、全双工通信协议\u003C/span>\u003C/p>\u003Cp>B 同步、半双工通信协议\u003C/p>\u003Cp>C 异步、全双工通信协议\u003C/p>\u003Cp>D 异步、半双工通信协议\u003C/p>\u003Cp>13、用于检测 WiFi 是否连通的命令为\u003C/p>\u003Cp>A ipconfig\u003C/p>\u003Cp>B msconfig\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C ping\u003C/span>\u003C/p>\u003Cp>D dir\u003C/p>\u003Cp>14、TCP/IP 协议不包含?\u003C/p>\u003Cp>A HTTP\u003C/p>\u003Cp>B POP3\u003C/p>\u003Cp>C FTP\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D WiFi\u003C/span>\u003C/p>\u003Cp>15、I2C 串行通信,用于传送数据的是?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A SDA\u003C/span>\u003C/p>\u003Cp>B SCL\u003C/p>\u003Cp>C MOSI\u003C/p>\u003Cp>D MISO\u003C/p>\u003Cp>16、ESP32 for Arduino 的 I2C 类库的下列成员函数中,用于向客户端发送数据的成员函数是?\u003C/p>\u003Cp>A Wire.begin()\u003C/p>\u003Cp>B Wire.beginTransmission()\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C Wire.endTransmission()\u003C/span>\u003C/p>\u003Cp>D Wire.requestFrom()\u003C/p>\u003Cp>17、ESP32 for Arduino 程序中导入 I2C 类库,相应的头文件为?\u003C/p>\u003Cp>A wire.h\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B Wire.h\u003C/span>\u003C/p>\u003Cp>C wring.h\u003C/p>\u003Cp>D Wring.h\u003C/p>\u003Cp>18、MPU6050 姿态传感器中,用于获取转动角速度的传感器单元是?\u003C/p>\u003Cp>A Accelerator\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B Gyroscope\u003C/span>\u003C/p>\u003Cp>C DMP\u003C/p>\u003Cp>D I2C\u003C/p>\u003Cp>19、执行如下程序,在串口监视器输入框输入“123abc456”后,点击“发送”,串口监视器窗口显示的内容是?\u003C/p>\u003Cp>\u003Cimg src=\"https://cos.mwst.cc/robotics/exam/51/image-20200801215336.png\" alt=\"\">\u003C/p>\u003Cp>A 123,\u003C/p>\u003Cp>B 123,0,456,\u003C/p>\u003Cp>C 456,\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D 123,456,\u003C/span>\u003C/p>\u003Cp>20、ESP32 for Arduino 的 I2C 类库的下列成员函数中,用于从客户端读取数据的成员函数是?\u003C/p>\u003Cp>A Wire.begin()\u003C/p>\u003Cp>B Wire.beginTransmission()\u003C/p>\u003Cp>C Wire.endTransmission()\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D Wire.requestFrom()\u003C/span>\u003C/p>\u003Cp>21、MPU6050 姿态传感器中,用于获取加速度原始数据的传感器单元是?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A Accelerator\u003C/span>\u003C/p>\u003Cp>B Gyroscope\u003C/p>\u003Cp>C DMP\u003C/p>\u003Cp>D I2C\u003C/p>\u003Cp>22、下图是三相反应式步进电机工作示意图,当采用三相双三拍通电方式运转时,其步距角是?\u003C/p>\u003Cp>\u003Cimg src=\"https://cos.mwst.cc/robotics/exam/51/image-20201015143752.png\" alt=\"\">\u003C/p>\u003Cp>A 15 度\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B 30 度\u003C/span>\u003C/p>\u003Cp>C 45 度\u003C/p>\u003Cp>D 60 度\u003C/p>\u003Cp>23、MPU6050 姿态传感器的加速度传感器单元可以设置如下不同的量程,其中测量精度最高的量\n程是?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A ±2g\u003C/span>\u003C/p>\u003Cp>B ±4g\u003C/p>\u003Cp>C ±8g\u003C/p>\u003Cp>D ±16g\u003C/p>\u003Cp>24、MPU6050 姿态传感器获取的原始数据,经过数据融合,获得传感器的姿态角,其中表示传感\n器上下角度变化的是?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A 俯仰角\u003C/span>\u003C/p>\u003Cp>B 偏航角\u003C/p>\u003Cp>C 滚转角\u003C/p>\u003Cp>D 加速度\u003C/p>\u003Cp>25、下列用于在浏览器选项卡中显示标题信息的标签是?\u003C/p>\u003Cp>A \u003Chtml>\u003C/p>\u003Cp>B \u003Chead>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C \u003Ctitle>\u003C/span>\u003C/p>\u003Cp>D \u003Cbody>\u003C/p>\u003Cp>26、ESP32 主控板和 MPU6050 通过 I2C 进行数据交互,下列说法正确的是?\u003C/p>\u003Cp>A 启动数据传送由 ESP32 负责,终止数据传送由MPU6050 负责\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B 启动数据和终止数据传送均由 ESP32 负责\u003C/span>\u003C/p>\u003Cp>C 启动数据和终止数据传送均由 MPU6050 负责\u003C/p>\u003Cp>D 启动数据传送由 MPU6050 负责,终止数据传送由 ESP32 负责\u003C/p>\u003Cp>27、I\n2\nC 串行通信中,数据线 SDA 的作用是?\u003C/p>\u003Cp>A 发送数据\u003C/p>\u003Cp>B 接受数据\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C 发送和接受数据\u003C/span>\u003C/p>\u003Cp>D 发送时钟数据\u003C/p>\u003Cp>28、IPV4 的地址长度为?\u003C/p>\u003Cp>A 16\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B 32\u003C/span>\u003C/p>\u003Cp>C 64\u003C/p>\u003Cp>D 128\u003C/p>\u003Cp>29、.SPI 通信中,主机向从机发送数据的数据线为 ?\u003C/p>\u003Cp>A SCLK\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B MOSI\u003C/span>\u003C/p>\u003Cp>C MISO\u003C/p>\u003Cp>D SS\u003C/p>\u003Cp>30、.ESP32 for Arduino 的 I2C 类库的下列成员函数中,用于向客户端发送数据的成员函数是?\u003C/p>\u003Cp>A Wire.write()\u003C/p>\u003Cp>B Wire.beginTransmission()\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C Wire.endTransmission()\u003C/span>\u003C/p>\u003Cp>D Wire.requestFrom()\u003C/p>\u003Cp>31、ESP32 for Arduino 提供的 WiFi 类库的成员函数 WiFi.softAP 的功能是?\u003C/p>\u003Cp>A 以 STA 模式连接到 AP\u003C/p>\u003Cp>B 返回 softAP 的 IP 地址\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C 创建一个接入点,并设置 SSID 和密码\u003C/span>\u003C/p>\u003Cp>D 启动 web 服务器\u003C/p>\u003Cp>32、PID 控制中 I 控制是指?\u003C/p>\u003Cp>A 比例控制\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B 积分控制\u003C/span>\u003C/p>\u003Cp>C 微分控制\u003C/p>\u003Cp>D 闭环控制\u003C/p>\u003Cp>33、有关 TCP/IP 协议下列说法错误的有?\u003C/p>\u003Cp>A TCP/IP 协议是一系列协议家族的统称\u003C/p>\u003Cp>B TCP/IP 协议包含了 TCP 协议和 IP 协议\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C TCP/IP 四层模型从底向上,依次是:应用层、网络层、传输层、网络接口层\u003C/span>\u003C/p>\u003Cp>D TCP/IP 协议当前 Internet 的基础协议\u003C/p>\u003Cp>34、下列命令中,用于检测 WiFi 是否连通的命令是?\u003C/p>\u003Cp>A ipconfig\u003C/p>\u003Cp>B msconfig\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C ping\u003C/span>\u003C/p>\u003Cp>D cmd\u003C/p>\u003Cp>35、中国电子学会科普中心官方网站网址为 www.kpcb.org.cn,该网址是?\u003C/p>\u003Cp>A 统一资源定位符(URL)\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B 域名\u003C/span>\u003C/p>\u003Cp>C IP 地址\u003C/p>\u003Cp>D 网站\u003C/p>\u003Cp>36、下列部件中,不属于步进电机的是?\u003C/p>\u003Cp>A 绕组\u003C/p>\u003Cp>B 定子\u003C/p>\u003Cp>C 转子\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D 换向器\u003C/span>\u003C/p>\u003Cp>37、关于 I2C 通信,下面说法错误的是?\u003C/p>\u003Cp>A I2C 总线上的设备有主从之分\u003C/p>\u003Cp>B I2C 通信是串行通信\u003C/p>\u003Cp>C I2C 通信中从设备都有一个唯一的地址\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D I2C 通信是一种全双工通信方式\u003C/span>\u003C/p>\u003Cp>38、在 TCP/IP 通信中,通过 IP 地址+端口来区分不同的服务,web 服务对应的端口是?\u003C/p>\u003Cp>A 20\u003C/p>\u003Cp>B 21\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C 80\u003C/span>\u003C/p>\u003Cp>D 404\u003C/p>\u003Cp>39、 I2C 串行通信中,当总线空闲时,SDA 和 SCL 的电平分别为?\u003C/p>\u003Cp>A 低电平 高电平\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B 高电平 高电平\u003C/span>\u003C/p>\u003Cp>C 高电平 低电平\u003C/p>\u003Cp>D 低电平 低电平\u003C/p>\u003Cp>40、在 TCP/IP 通信中,率先发起通信请求的是 ?\u003C/p>\u003Cp>A 主设备\u003C/p>\u003Cp>B 服务器\u003C/p>\u003Cp>C 客户端和服务器都可以\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D 客户端\u003C/span>\u003C/p>\u003Cp> \u003C/p>\u003Cp>\u003Cstrong>二、多选题\u003C/strong>\u003C/p>\u003Cp>41、步进电机按照结构形式分类为?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A 反应式\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B 永磁式\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C 混合式\u003C/span>\u003C/p>\u003Cp>D 直线式\u003C/p>\u003Cp>42、PID 控制器常用的组合有哪些?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A PI\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B PD\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C PID\u003C/span>\u003C/p>\u003Cp>D ID\u003C/p>\u003Cp>43、ESP32 提供了 WiFi 功能,其提供了哪几种方式连接到 WiFi?\u003C/p>\u003Cp>A HTTP\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B STA\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C STA+AP\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D AP\u003C/span>\u003C/p>\u003Cp>44、采用 SPI 进行数据通信,下列四个引脚用于数据传输的引脚有哪些?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A MOSI\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B MISO\u003C/span>\u003C/p>\u003Cp>C SS\u003C/p>\u003Cp>D SCLK\u003C/p>\u003Cp>45、MPU6050 得到的姿态角包含?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A pitch\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B yaw\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C roll\u003C/span>\u003C/p>\u003Cp>D gyroscope\u003C/p>\u003Cp>46、PID 控制,常用控制方式有?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A P 控制\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B PI 控制\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C PD 控制\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D PID 控制\u003C/span>\u003C/p>\u003Cp>47、HTML 文档结构分为?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A 头部\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B 主体\u003C/span>\u003C/p>\u003Cp>C 标签\u003C/p>\u003Cp>D 文本\u003C/p>\u003Cp>48、.以下属于双工串行通信的有?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A UART\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B I2C\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C SPI\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">D 蓝牙通信\u003C/span>\u003C/p>\u003Cp>49、ESP32 主控板工作在 AP 模式时,下列哪些设备可以接入到该主控板?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A 手机\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B 电脑\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C 其它 ESP32 主控板\u003C/span>\u003C/p>\u003Cp>D 蓝牙控制器\u003C/p>\u003Cp>50、关于步进电机,以下说法中正确的有?\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">A 步进电机转动通过电脉冲信号控制。\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">B 步进电机转动的速度与脉冲频率成正比。\u003C/span>\u003C/p>\u003Cp> \u003Cspan style=\"color: rgb(225, 60, 57);\">C 步进电机是执行器。\u003C/span>\u003C/p>\u003Cp>D 步进电机运转时,会产生误差累计。\u003C/p>\u003Cp> \u003C/p>\u003Cp>\u003Cstrong>三、判断题\u003C/strong>\u003C/p>\u003Cp>51、步进电机旋转需要控制器驱动。\u003C/p>\u003Cp>\u003Cspan style=\"color: rgb(225, 60, 57);\">A 正确 \u003C/span>\u003C/p>\u003Cp>B 错误\u003C/p>\u003Cp>52、I2C 串行通信中,SDA 数据线用于发送数据。\u003C/p>\u003Cp>A 正确\u003C/p>\u003Cp>\u003Cspan style=\"color: rgb(225, 60, 57);\">B 错误 \u003C/span>\u003C/p>\u003Cp>53、TCP/IP 通信,消息响应模式为 Request-Response。\u003C/p>\u003Cp>\u003Cspan style=\"color: rgb(225, 60, 57);\">A 正确 \u003C/span>\u003C/p>\u003Cp>B 错误\u003C/p>\u003Cp>54、仅通过 MPU6050 姿态传感器获得的角速度数据不能解析出姿态角.\u003C/p>\u003Cp>A 正确\u003C/p>\u003Cp>\u003Cspan style=\"color: rgb(225, 60, 57);\">B 错误 \u003C/span>\u003C/p>\u003Cp>55、SPI 通信的时钟频率可以在初始化时设定。\u003C/p>\u003Cp>\u003Cspan style=\"color: rgb(225, 60, 57);\">A 正确 \u003C/span>\u003C/p>\u003Cp>B 错误\u003C/p>\u003Cp>56、TCP/IP 协议是一个协议族,由众多协议组成。\u003C/p>\u003Cp>\u003Cspan style=\"color: rgb(225, 60, 57);\">A 正确 \u003C/span>\u003C/p>\u003Cp>B 错误\u003C/p>\u003Cp>57、SPI 通信中,数据线 MISO 可以没有。\n\u003C/p>\u003Cp>\u003Cspan style=\"color: rgb(225, 60, 57);\">A 正确 \u003C/span>\u003C/p>\u003Cp>B 错误\u003C/p>\u003Cp>58、 SPI 通信比较灵活,可以自行设定采样方式和时钟频率。\u003C/p>\u003Cp>\u003Cspan style=\"color: rgb(225, 60, 57);\">A 正确 \u003C/span>\u003C/p>\u003Cp>B 错误\u003C/p>\u003Cp>59、 TCP/IP 通信,消息响应模式为订阅-发布模式。\u003C/p>\u003Cp>A 正确\u003C/p>\u003Cp>\u003Cspan style=\"color: rgb(225, 60, 57);\">B 错误 \u003C/span>\u003C/p>\u003Cp>60、 UART、SPI、I2C 都是串行通信。\n\u003C/p>\u003Cp>\u003Cspan style=\"color: rgb(225, 60, 57);\">A 正确 \u003C/span>\u003C/p>\u003Cp>B 错误\u003C/p>\u003Cp style=\"color: rgb(225, 60, 57);\">\u003Ca href=\"https://www.mwst.cc\">喵呜刷题:\u003C/a>让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!\u003C/p>\u003Cp style=\"text-align: center;\">\u003Cimg style=\"height: 200px;height: 200px;\" src=\"https://cos.mwst.cc/mwst/xcx_index_web.jpg\" art>\u003C/p>",null,[22],{"createTime":23,"creator":24,"updateTime":25,"updater":24,"deleted":12,"id":26,"name":27,"parentId":28,"slug":29,"thumbnail":13,"description":13,"sort":12},"2023-04-11 08:03:16","1","2024-05-11 17:55:03",219,"机器人技术等级考试历年真题",59,"RobotLevelExamHistorical","https://mwst.cc/archives/1696159065136300032","2026-02-18",["Reactive",4],["Reactive",34],{},["Set"],["ShallowReactive",37],{"knowledge-detail-1696159065136300032":20,"6d0fb835-9d56-44c8-b1d7-722fb3ee2043":20},true,"/archives/1696159065136300032",["Reactive",41],{"themeConfig":42},{"themeConfig":43},{"loginFlag":44,"registerFlag":44,"showMineFlag":44},false]</script>
<script>window.__NUXT__={};window.__NUXT__.config={public:{baseURL:"https://mwst.cc/",baseDomain:"https://mwst.cc/",persistedState:{storage:"cookies",debug:false,cookieOptions:{}}},app:{baseURL:"/",buildId:"738dbc6f-e408-4c38-9812-f7181d344e00",buildAssetsDir:"/_nuxt/",cdnURL:""}}</script></body></html>



