



一、单选题
1、整型变量val的值为0xAA,函数bitSet(val,2)的运算结果是?
A、0xAA
B、0xAE
C、0xEA
D、0xAC
2、UART进行数据传送时,起始位和停止位的电平分别是?
A、低电平 低电平
B、低电平 高电平
C、高电平 低电平
D、高电平 高电平
3、字符串如下所示,下列选项中,从字符串解析出整数123并发送到串口监视器的是?( )

A 
B 
C 
D 
4、ESP32芯片内部DAC的精度是多少位?
A、8
B、10
C、12
D、16
5、ESP32主控板,设置数字引脚为输出模式时,对应的参数是?
A、INPUT
B、OUTPUT
C、INPUT_PULLUP
D、INPUT_PULLDOWN
6、有关按键消抖下列说法错误的是?( )
A、按键抖动是因为按键内金属簧片在接触瞬间是一个连续通断的过程。
B、按键抖动分为前沿抖动和后沿抖动。
C、常用的消抖方式有软件消抖和硬件消抖。
D、一般来说,按键抖动的次数是固定的。
7、ESP32 for Arduino中,程序Serial.printf()中表示十六进制整数输出的格式字符为?( )
A、%o
B、%d
C、%x
D、%f
8、下列函数中,用于将数据指定位设置为1(置位)的函数是?
A、shiftOut()
B、bitSet()
C、bitClear()
D、bitRead()
9、通过shiftOut(dataPin,clockPin,bitOrder,value)函数向74HC595移位寄存器芯片写入数据,下列说法错误的是
A、dataPin引脚和74HC595的Ds引脚相连;
B、clockPin引脚和74HC595的SH_CP引脚相连;
C、bitOrder表示输出位的顺序,分别为MSBFIRST和LSBFIRST;
D、shiftOut函数输入数据时是并入串出。
10、ESP32 for Arduino,下列中断触发模式中,属于高电平触发的是?
A、ONLOW
B、ONHIGH
C、RISING
D、HIGH
11、Serial.println(0xB,BIN)的结果是?
A、0xA
B、10
C、1011
D、1110
12、ESP32 程序中模拟输入对应如下语句,变量 potVal 的返回值的范围是?

A、0~1
B、0~511
C、0~1023
D、0~4095
13、程序执行后val的值是?

A、12
B、11
C、10
D、8
14、ESP32 for Arduino采用LEDC方式进行模拟输出时,取消指定引脚PWM信号输出的函数是?( )
A、ledcSetup()
B、ledcAttachPin()
C、ledcDetachPin()
D、ledcWrite()
15、ESP32 for Arduino中,程序Serial.printf()中表示字符串输出的格式字符是?
A、%o
B、%d
C、%s
D、%f
16、ESP32 for Arduino,电路如图所示,运行下列程序后,当按键按下时LED灯点亮,第2行程序中mode对应的是?
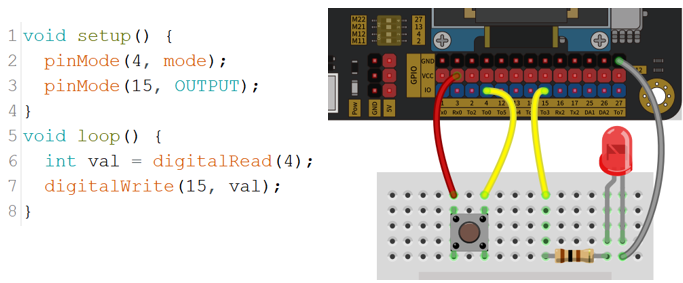
A、INPUT
B、OUTPUT
C、INPUT_PULLUP
D、INPUT_PULLDOWM
17、执行下列程序后,串口监视器显示的值为( )

A、25
B、29
C、54
D、58
18、关于 8x8 点阵,下列说法错误的是?
A、8x8 点阵显示一般采用动态显示
B、8x8 点阵一共有 16 个引脚分别控制行和列
C、可以同时点亮对角线的两颗 LED 灯
D、可以同时控制同一行中不同 LED 的亮灭
19、ESP32 for Arduino,下列中断触发模式中,属于下降沿触发的是?
A、ONLOW
B、ONHIGH
C、RISING
D、FALLING
20、ESP32 for Arduino,下列选项中,不正确的是?( )
A、报文是按照约定好的格式组织起来的数据
B、millis()函数返回当前程序自开始运行至当前的时间
C、一般情况下,8x8点阵采用静态显示
D、UART通信时,通常使用两条信号线传送数据
二、多选题
21、与Arduino UNO/Nano主控板相比,下列选项中,ESP32主控芯片所独有的外设是?( )
A、触摸传感器
B、蓝牙
C、霍尔传感器
D、WiFi
22、有关millis()函数下列说法正确的是?
A、millis()函数返回当前程序自开始运行至当前的时间
B、millis()函数返回的时间单位为微秒
C、系统长时间运行时,要预防保存millis()函数返回值的变量可能会发生数据溢出
D、在程序运行时,可将millis()函数的返回值归0,以防止数据溢出
23、ESP32WROOM 模块集成如下哪些模块?
A、WiFi 模块
B、经典蓝牙/低功耗蓝牙 BLE
C、Touch 电容模块
D、霍尔传感器
24、下列选项中程序中,用于在程序中表示变量a除以4的表达式有?
A、a/4
B、a>>2
C、a
D、a>>4
25、ESP32 数字信号输入引脚,用于设置引脚输入模式的有哪些?
A、HIGH
B、LOW
C、INPUT_PULLUP
D、INPUT_PULLDOWN
三、判断题
26、ESP32 for Arduino程序中,可使用sizeof()函数来获取数组中元素的长度。( )
A 正确
B 错误
27、通常情况下,四位数码管必须采用动态显示
A 正确
B 错误
28、串行通信将数据的每一位按先后顺序传送,每一位占据一个固定的时间长度。( )
A 正确
B 错误
29、UART通信有两根数据线,分别为TX和RX,所以UART是并行通信。( )
A 正确
B 错误
30、UART是异步串行通信。( )
A 正确
B 错误
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




