



一、单选题
1、ESP32 for Arduino,触摸传感器函数touchRead()返回值的范围是?
A、0~255
B、0~1023
C、0~4095
D、可通过参数设置范围值
2、ESP32 for Arduino,下列程序的运行后,串口监视器显示的结果是?
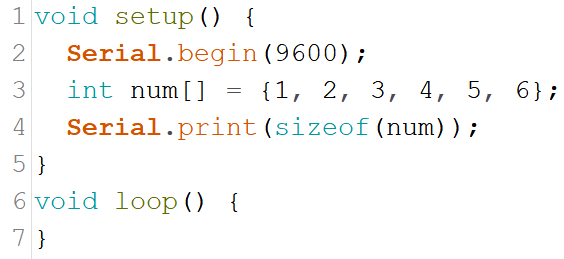
A、4
B、6
C、12
D、24
3、ESP32 for Arduino,下列函数中,用于返回指定电容传感器引脚返回值的函数是?( )
A、touchRead()
B、touchWrite()
C、touchAttachInterrupt()
D、hallRead()
4、Serial类库成员函数中,Serial.available()的作用是?( )
A、返回UART发送缓冲区中的字节数
B、返回UART接受缓冲区中的字节数
C、从UART缓冲区中读取数据
D、向UART缓冲区中写入数据
5、UART进行数据传送时,用于数据接收的引脚是?
A、RX
B、TX
C、GND
D、Vcc
6、UART 通信的起始位是?
A、高电平
B、低电平
C、上升沿
D、下降沿
7、Serial.println(val,format)程序将val以十六进制输出到串口监视器,format应为( )
A、BIN
B、OCT
C、HEX
D、DEC
8、UART进行数据传送时,下列说法正确的是?
A、数据传送时,先发送数据的低位
B、数据传送时,先发送数据的高位
C、起始位为高电平
D、停止位为低电平
9、ESP32 for Arduino,下列选项所列的数据类型,运算符sizeof()返回值为4的是?( )
A、boolean
B、char
C、int
D、long long
10、ESP32程序中模拟输入取样分辨率设置语句为analogSetWidth(11),函数analogRead()返回的最大值是?
A、511
B、1023
C、2047
D、4095
11、电路搭设和对应的程序如下,当按键开关按下后,LED灯点亮,程序中A和B分别为?( )

A、INPUT_PULLUP HIGH
B、INPUT_PULLUP LOW
C、INPUT_PULLDOWN HIGH
D、INPUT_PULLDOWN LOW
12、ESP32 for Arduino,与函数touchRead()相关的外设是?( )
A、GPIO
B、ADC
C、霍尔传感器
D、电容触摸传感器
13、ESP32 for Arduino,下列程序的运行结果是?( ) byte num[] = {1, 2, 3, 4, 5, 6, 7,8}; Serial.printf("%d %d\n",num[1],sizeof(num) / sizeof(num[0]));
A、1 8
B、1 36
C、2 8
D、2 36
14、ESP32程序中模拟输入的返回值在0~511之间,下列程序正确的是
A、analogSetWidth(9);
B、analogSetWidth(10);
C、analogSetWidth(11);
D、analogSetWidth(12);
15、UART进行数据传送时,起始位和停止位的电平分别是?
A、低电平 低电平
B、低电平 高电平
C、高电平 低电平
D、高电平 高电平
16、通过shiftOut函数向74HC595移位寄存器芯片DS引脚发送数据,程序如下,程序运行后,74HC595移位寄存器芯片中的数据正确的是? shiftOut(dataPin,clockPin,LSBFIRST,0xF);

A、a
B、b
C、c
D、d
17、执行下列程序后,运行结果是

A、1
B、4
C、5
D、6
18、ESP32 主控芯片,和模拟输入相对应的模块是?
A、LEDC
B、SigmaDelta
C、DAC
D、ADC
19、执行程序 Serial.write(65),串口监视器显示的内容为?
A、65
B、"65"
C、A
D、a
20、ESP32 for Arduino,下列中断触发模式中,属于低电平触发的是?
A、ONLOW
B、ONHIGH
C、LOW
D、FALLING
二、多选题
21、ESP32 for Arduino 的中断触发模式有?
A、HIGH
B、CHANGE
C、RISING
D、FALLING
22、ESP32 for Arduino,使用 pinMode函数设置数字引脚的工作模式,下列四种模式中,与Arduino UNO/Nano主控板共同具有的是?( )
A、INPUT
B、OUTPUT
C、INPUT_PULLUP
D、INPUT_PULLDOWN
23、ESP32主控板,设置数字引脚为输入模式时,对应的参数有?
A、INPUT
B、OUTPUT
C、INPUT_PULLUP
D、INPUT_PULLDOWN
24、ESP32所集成的蓝牙外设,包含?
A、经典蓝牙
B、低功耗蓝牙
C、WiFi
D、UART
25、ledcSetup()函数的参数有?
A、频率
B、分辨率
C、引脚号
D、通道号
三、判断题
26、.中断回调函数可以有参数,但不能有返回值。
A 正确
B 错误
27、UART通信,一个完整的数据帧由起始位、数据位和停止位组成。( )
A 正确
B 错误
28、UART是同步串行通信。
A 正确
B 错误
29、EEPROM中的内容在系统断电后不会丢失。
A 正确
B 错误
30、74HC595移位寄存器芯片,SH_CP引脚是低电平是传送数据到移位寄存器。
A 正确
B 错误
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




