



一、单选题
1、使用下列工具不能省力的是?( )
A、斜面
B、动滑轮
C、定滑轮
D、省力杠杆
解析:【喵呜刷题小喵解析】本题考查的是简单机械中省力工具的认识。A选项,斜面是一种简单机械,可以将力分散到更大的距离上,从而省力。因此,斜面可以省力。B选项,动滑轮是一个可以围绕固定点旋转的滑轮,它可以改变力的方向,同时也可以通过改变滑轮的组合方式来实现省力。因此,动滑轮也可以省力。C选项,定滑轮是一个固定不动的滑轮,它不能省力,只能改变力的方向。所以,使用定滑轮不能省力。D选项,省力杠杆是一种杠杆,通过改变力臂的长度可以实现省力。因此,省力杠杆可以省力。综上所述,使用定滑轮不能省力,因此正确答案是C选项。
2、下列哪个图片所示的力最小?( )
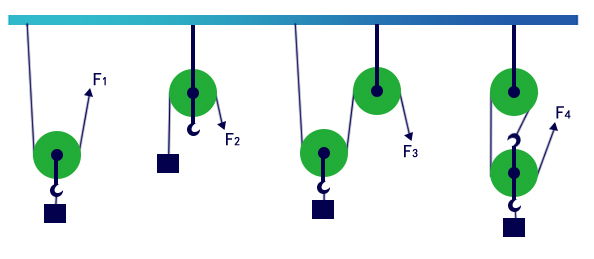
A、F1
B、F2
C、F3
D、F4
解析:【喵呜刷题小喵解析】根据图片,四个力的大小分别表示为F1、F2、F3和F4。由于题目要求找出最小的力,我们需要比较这四个力的大小。然而,题目中并没有给出具体的力的大小数值,因此我们无法直接判断哪个力是最小的。因此,我们需要更多的信息来确定哪个力是最小的。在没有给出具体数值的情况下,我们无法准确判断哪个力是最小的,所以我们需要更多的信息来进行判断。由于题目中并没有给出更多的信息,我们只能根据题目所给的图片来进行推测。根据图片中的比例,我们可以大致看出F4似乎比其他三个力要小一些,但这只是基于视觉的推测,并不能作为准确的判断依据。因此,在没有更多信息的情况下,我们无法确定哪个力是最小的。所以,我们需要更多的信息来进行判断。然而,由于题目中没有给出更多的信息,我们只能根据现有的信息来回答。因此,我们无法确定哪个力是最小的,只能选择无法确定作为答案。在实际问题中,如果有具体的数值,我们可以直接比较数值大小来确定哪个力是最小的。如果没有具体的数值,我们需要更多的信息来进行判断。
3、关于荡秋千下列说法正确的是?( )
A、秋千在最低点时速度最大
B、秋千在最低点时动能为0
C、秋千在最高点时势能最小
D、秋千在最高点时势能为0
解析:【喵呜刷题小喵解析】:根据能量守恒定律,秋千在最高点势能最大,当它向最低点摆动时,势能逐渐转化为动能,所以速度会增大,动能也会增大,到最低点时动能最大,速度也最大。因此,选项A“秋千在最低点时速度最大”是正确的。选项B“秋千在最低点时动能为0”是错误的,因为秋千在最低点时动能最大。选项C“秋千在最高点时势能最小”也是错误的,因为秋千在最高点时势能最大。选项D“秋千在最高点时势能为0”同样是错误的,因为秋千在最高点时势能最大。
4、如图,从下列机械手表的内部结构图中我们能看到?( )

A、齿轮平行啮合
B、齿轮垂直啮合
C、履带
D、链传动
解析:【喵呜刷题小喵解析】从题目中给出的机械手表内部结构图可以看出,该机械手表内部存在多个齿轮,这些齿轮之间通过平行啮合的方式传递动力。因此,正确答案是齿轮平行啮合。齿轮垂直啮合、履带和链传动在图中均未出现。
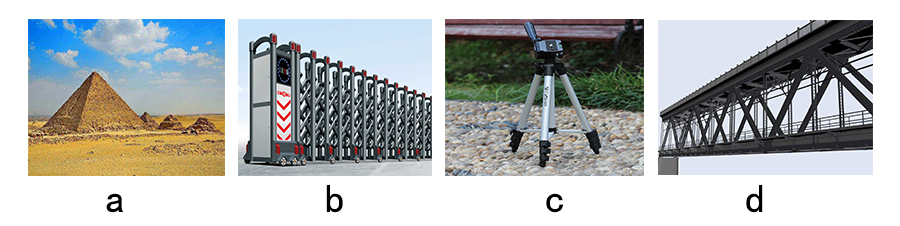
5、下列图片所示结构最稳定的是?( )
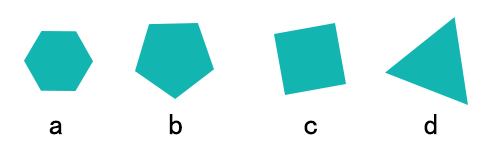
A、a
B、b
C、c
D、d
解析:
【喵呜刷题小喵解析】观察图片,我们可以发现:D项:三角形是三角形,三角形的稳定性相比其它四边形、五边形、六边形结构要稳定。
6、从木块上拔出一根钉子使用下列哪个工具最方便?( )
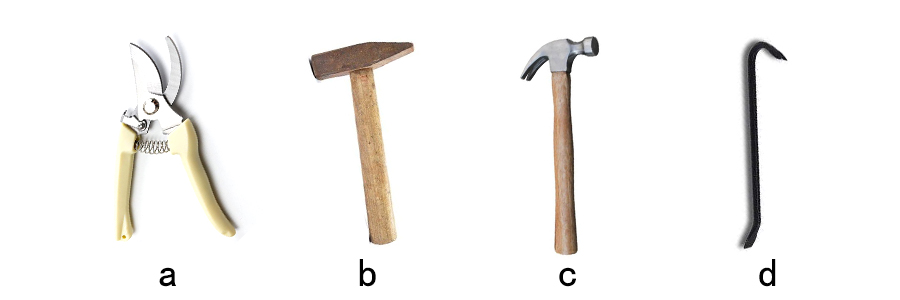
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】从图片中可以看到,工具a和工具b的头部都比较小,可能无法有效地抓住钉子进行拔出。工具c的头部较大,可以更容易地抓住钉子,从而方便拔出。工具d虽然头部较大,但形状可能不适合用于拔出钉子。因此,从木块上拔出一根钉子使用工具c最方便。
7、关于单摆,下列说法正确的是?( )
A、单摆的运动轨迹没有规律
B、所有单摆的运动周期大小一样
C、单摆运动周期与重力加速度有关
D、单摆的运动周期与摆长无关
解析:【喵呜刷题小喵解析】对于单摆的运动,其运动轨迹为简谐振动,因此A选项是错误的。所有单摆的运动周期与摆长有关,根据单摆周期公式T=2π√(L/g),其中L是摆长,g是重力加速度。不同的摆长对应不同的周期,因此B选项错误。而C选项指出单摆的运动周期与重力加速度有关,这是正确的。至于D选项,单摆的运动周期与摆长有明确的关系,因此D选项也是错误的。综上所述,正确答案是C。
8、如图使用镊子相当于使用杠杆,支点是?( )
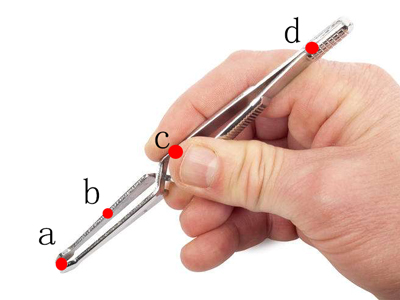
A、a点
B、b点
C、c点
D、d点
解析:【喵呜刷题小喵解析】:根据杠杆的定义,杠杆是一种能够围绕固定点转动的硬棒。在这个问题中,镊子可以看作是一个杠杆,而杠杆的固定点就是支点。从图片中可以看到,镊子的转动是围绕一个固定的点进行的,这个点就是支点。根据图片中的标记,这个支点位于d点,因此正确答案是D。
9、使用轮轴相当于使用了?( )
A、杠杆
B、传动链
C、斜面
D、齿轮
解析:【喵呜刷题小喵解析】:轮轴是一种利用轮和轴来传递动力和改变力的方向的简单机械。轮轴在实质上是一个杠杆,使用轮轴时,轮和轴实际上是一个整体,因此可以看作是一个杠杆,支点就在轮轴心,轮轴在使用时,动力作用在轮上,阻力作用在轴上,所以是一个省力杠杆。因此,使用轮轴相当于使用了杠杆。所以,正确答案是nA 杠杆。
10、机器人的控制器相当于人类的?( )
A、大脑
B、心脏
C、手臂
D、皮肤
解析:【喵呜刷题小喵解析】:机器人的控制器是机器人的核心部分,负责接收和处理各种传感器输入,控制机器人的运动,以及处理各种任务。这与人类的大脑功能相似,大脑是人类的控制中心,负责接收和处理来自感官的信息,控制身体的运动,以及处理各种复杂的思维活动。因此,机器人的控制器相当于人类的大脑。选项A“大脑”是正确的答案。
11、关于斜面说法正确的是?( )
A、所有斜面的长度是相等的
B、一般斜面越长越省力
C、使用斜面能省功
D、应用斜面不能省力
解析:【喵呜刷题小喵解析】:根据物理学的知识,使用斜面可以省力,但是使用时需要克服摩擦力做功,所以并不能省功。斜面越长,物体从斜面底部到顶部的高度越大,可以省力越多,但是需要克服的摩擦力做功也越多,所以省力并不是绝对的,还需要考虑斜面的长度和摩擦力等因素。因此,选项B“一般斜面越长越省力”是正确的。选项A“所有斜面的长度是相等的”是错误的,因为斜面的长度可以因不同的应用场景而变化。选项C“使用斜面能省功”是错误的,因为使用斜面时需要克服摩擦力做功,所以并不能省功。选项D“应用斜面不能省力”也是错误的,因为使用斜面可以省力。
12、下列用品中,常用来连接结构体的有?( )
A、锤子
B、螺丝钉
C、扳手
D、耳机
解析:【喵呜刷题小喵解析】:题目要求选出常用来连接结构体的用品。在给出的选项中,A选项“锤子”主要用于敲击和敲打,而不是连接结构体;C选项“扳手”虽然可以用来调整螺栓和螺母,但它不是用来连接结构体的主要工具;D选项“耳机”更是与连接结构体无关。而B选项“螺丝钉”是一种常用的连接件,通过螺丝钉可以将两个或多个结构体紧密地连接在一起。因此,正确答案是B。
13、下列哪个图片是齿轮垂直啮合?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】齿轮垂直啮合指的是两个齿轮在垂直方向上相互咬合并旋转,从而传递动力。在提供的四个选项中,C选项的图片显示了两个齿轮在垂直方向上相互咬合并旋转,符合齿轮垂直啮合的定义。因此,正确答案是C。
14、如图,该工具是?( )

A、剪刀
B、锤头
C、螺丝刀
D、尖嘴钳
解析:【喵呜刷题小喵解析】:根据图片信息,该工具具有尖嘴形状,适用于夹取小物件或进行精细操作。因此,该工具最有可能是尖嘴钳。选项A的剪刀主要用于剪切,选项B的锤头用于敲击,选项C的螺丝刀用于旋转螺丝,均与该工具的功能不符。因此,正确答案是D,即尖嘴钳。
15、如图关于该齿轮组说法正确的是?( )

A、a和b的转向相同
B、如果a是主动轮,这个齿轮组起加速作用
C、该齿轮组的的传动比无法计算
D、该齿轮组的传动比可以通过两齿轮的齿数计算
解析:【喵呜刷题小喵解析】首先,我们需要明确齿轮的工作原理。当一对齿轮相互啮合时,如果主动轮转动,那么从动轮的转向将与主动轮的转向相反,而转速则与齿轮的齿数成反比。A选项提到a和b的转向相同,这与齿轮的工作原理相矛盾,因此A选项是错误的。B选项说如果a是主动轮,这个齿轮组起加速作用。然而,根据齿轮的工作原理,如果主动轮的齿数少于从动轮的齿数,那么从动轮的转速会高于主动轮的转速,这被称为减速。反之,如果主动轮的齿数多于从动轮的齿数,那么从动轮的转速会低于主动轮的转速,这被称为加速。因此,B选项没有明确指出齿轮的齿数关系,所以B选项是错误的。C选项提到该齿轮组的传动比无法计算。实际上,齿轮的传动比可以通过主动轮和从动轮的齿数来计算,即传动比 = 主动轮的齿数 / 从动轮的齿数。因此,C选项是错误的。D选项说该齿轮组的传动比可以通过两齿轮的齿数计算,这是正确的。根据齿轮的工作原理,传动比可以通过主动轮和从动轮的齿数来计算。综上所述,正确答案是D选项。
16、下列选项中起加速作用的齿轮组是?( )
A、主动轮12齿,从动轮4齿
B、主动轮12齿,从动轮24齿
C、主动轮4齿,从动轮12齿
D、主动轮6齿,从动轮12齿
解析:
【喵呜刷题小喵解析】齿轮组中的加速作用是指主动轮转速高于从动轮转速。根据齿轮的工作原理,当主动轮的齿数多于从动轮的齿数时,主动轮每转一圈,从动轮转的圈数会多于主动轮,即从动轮转速高于主动轮转速。因此,起加速作用的齿轮组是主动轮齿数多于从动轮齿数的组合。选项A中主动轮12齿,从动轮4齿,主动轮齿数多于从动轮齿数,所以A是起加速作用的齿轮组。选项B中主动轮12齿,从动轮24齿,主动轮齿数少于从动轮齿数,所以B不是起加速作用的齿轮组。选项C中主动轮4齿,从动轮12齿,主动轮齿数少于从动轮齿数,所以C不是起加速作用的齿轮组。选项D中主动轮6齿,从动轮12齿,主动轮齿数少于从动轮齿数,所以D不是起加速作用的齿轮组。因此,正确答案是A。
17、关于履带说法正确的是?( )
A、使用履带会减小车体与地面的接触面积
B、使用履带有助于防滑
C、履带会增大车体对地面的压强
D、履带的长度无法调节
解析:【喵呜刷题小喵解析】:履带的主要作用是为了增大车体与地面的接触面积,从而分散车体的重量,减小对地面的压强,防止陷入软土地面。因此,使用履带会增大车体与地面的接触面积,而不是减小。选项A和C的说法是错误的。另外,履带的长度通常是可调节的,以适应不同的地形和车辆需求。因此,选项D的说法也是错误的。所以,正确答案是B,使用履带有助于防滑。
18、以下有几个定滑轮? ( )

A、1个
B、2个
C、3个
D、4个
解析:【喵呜刷题小喵解析】:观察图片,可以看到图片中只有一个滑轮,但这个滑轮是一个组合滑轮,由两个独立的滑轮组成,因此总共有4个滑轮。所以,答案是D,即4个滑轮。
19、如图从山脚爬到山顶从哪个点出发最省力?( )
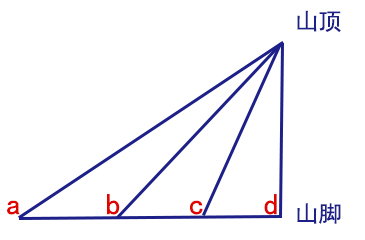
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】观察图片,从山脚到山顶的路径是一个斜向上的曲线。为了最省力地爬山,应该沿着与这个曲线最为接近的直线爬升。从给出的选项来看,点A到山顶的连线与山体的曲线最为接近,因此从点A出发最省力。
20、如图盘山公路应用了哪个机构?( )

A、杠杆
B、滑轮
C、斜面
D、轮轴
解析:【喵呜刷题小喵解析】:盘山公路是为了增大斜面长度而设计的,它应用了斜面机构。斜面可以省力,当斜面与水平面之间的夹角越大,所需的力就越大,因此盘山公路将斜面设计成逐渐增大的方式,以减小所需的力,使得车辆能够更轻松地爬升。因此,选项C“斜面”是正确答案。
21、如图下列说法正确的是?( )
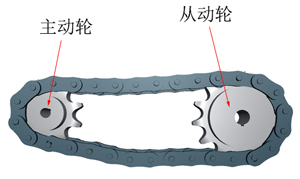
A、这是加速装置
B、链条长度无法调节
C、两个链轮转向相反
D、速度和力的计算与齿轮传动相似
解析:【喵呜刷题小喵解析】对于题目中给出的装置图,我们需要识别图中的元素及其功能,然后分析每个选项的正确性。A选项提到这是加速装置,但图中并未明确显示该装置具有加速功能,因此A选项不正确。B选项说链条长度无法调节,但从图中我们可以看到链条是可以调节长度的,因此B选项不正确。C选项说两个链轮转向相反,但从图中我们可以看到两个链轮是朝同一方向转动的,因此C选项不正确。D选项说速度和力的计算与齿轮传动相似,这是正确的。链传动和齿轮传动在速度和力的传递上有相似之处,都是通过轮齿或链条的接触来传递动力和速度。因此,D选项是正确的。
22、如图说法正确的是?( )
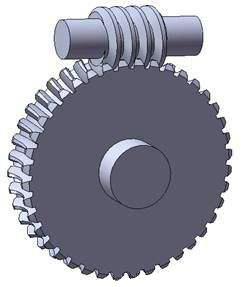
A、这是齿轮平行啮合
B、由两个平齿轮组成
C、这是蜗轮蜗杆机构
D、无法判断哪个是主动件
解析:【喵呜刷题小喵解析】齿轮平行啮合是指两个齿轮的轴线平行,它们通过齿轮的轮齿相互咬合来传递动力。而蜗轮蜗杆机构则是由蜗杆和蜗轮组成,蜗杆的轴线与蜗轮的轴线相互垂直,它们通过蜗杆的螺旋线与蜗轮的轮齿相互作用来传递动力。从题目给出的图片来看,齿轮的轴线并不平行,而是蜗杆的轴线与蜗轮的轴线相互垂直,因此这是蜗轮蜗杆机构。所以,选项C是正确的。
23、关于自行车中存在的链传动说法正确的是?( )
A、链条长度可以调节
B、传动比无法计算
C、两个链轮的转动方向相反
D、小链轮是主动轮
解析:【喵呜刷题小喵解析】自行车中的链传动是常见的机械传动方式。对于选项A,链条长度是可以调节的,通过调整链条的松紧,可以确保链条与链轮之间的良好啮合,从而确保传动的平稳和效率。因此,选项A是正确的。对于选项B,传动比是可以计算的。传动比是指主动轮与从动轮的转速之比,可以通过链轮齿数的比值来计算。因此,选项B是不正确的。对于选项C,两个链轮的转动方向不一定相反。链传动可以通过同一链条连接两个同向转动的链轮,也可以通过两个反向转动的链轮。因此,选项C是不准确的。对于选项D,小链轮不一定是主动轮。在自行车中,小链轮(后飞轮)通常是从动轮,而脚踏板连接的链轮是主动轮。然而,在一些特殊设计的自行车中,小链轮也可能是主动轮。因此,选项D是不全面的。综上所述,正确答案是选项A,链条长度可以调节。
24、下图中应用了轮轴的是?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:根据图片信息,我们可以观察到图中的装置是一个带有轮子的轴,轴的中心部分固定在一个支架上,轴的一端连接着一个把手。这种装置符合轮轴的定义,即利用轮和轴来传递动力和改变力矩的机械装置。因此,应用了轮轴的是选项B。
25、如图天平相当于?( )

A、省力杠杆
B、费力杠杆
C、等臂杠杆
D、轮轴
解析:【喵呜刷题小喵解析】:根据图片,我们可以观察到天平的两个杠杆是等长的,即等臂杠杆。等臂杠杆在杠杆平衡时,两边的力矩相等,因此既不省力也不省距离。所以,天平相当于等臂杠杆,选项C是正确的。
26、下列哪个不是机器人?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】题目中给出了四个选项,要求找出哪一个不是机器人。根据图片信息,我们可以逐一分析每个选项:A选项:图片展示的是一个人类的手,显然不是机器人。B选项:图片展示的是一个类似机器人的机械臂,很可能是机器人的一部分。C选项:图片展示的是一个类似机器人的头部,很可能是机器人的一部分。D选项:图片展示的是一个机器人的全身,显然是机器人。因此,根据以上分析,我们可以得出结论:A选项展示的是人类的手,不是机器人。所以,正确答案是A。
27、下图采用了平行四边形不稳定性的是?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】图中所示的结构是一个利用平行四边形不稳定性制作的简易伸缩结构。平行四边形在不受到外力作用时,形状是固定的,但当受到外力作用时,它的边长会发生变化,从而使整个结构发生伸缩或变形。因此,利用平行四边形不稳定性可以制作出可伸缩的结构,图中的简易伸缩结构正是利用了这一特性。所以,答案为B。
28、主动齿轮为6齿,从动齿轮为12齿,该组齿轮的传动比为?( )
A、2:1
B、1:2
C、3:1
D、1:3
解析:【喵呜刷题小喵解析】齿轮的传动比等于主动齿轮的齿数除以从动齿轮的齿数。在这个问题中,主动齿轮有6齿,从动齿轮有12齿。因此,传动比 = 6齿 ÷ 12齿 = 1/2 = 2:1。所以,该组齿轮的传动比为2:1,选择答案A。
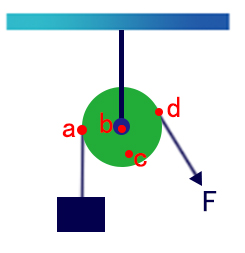
29、如图,定滑轮相当于一个等臂杠杆,那么支点是?( )
A、a点
B、b点
C、c点
D、d点
解析:【喵呜刷题小喵解析】定滑轮相当于一个等臂杠杆,等臂杠杆的支点位于杠杆的中点。根据图片,定滑轮的中点即为支点,因此支点是B选项中的b点。
30、如图斧头画圈的部分应用了?( )

A、轮轴
B、齿轮
C、滑轮
D、斜面
解析:【喵呜刷题小喵解析】:题目中描述的是斧头画圈的部分,这部分是斜面的应用。斜面是一种简单机械,可以将力分散到更大的面积上,使得施力更加轻松。在斧头中,斜面被用来将施加的力转化为对木头的剪切力,从而更容易地劈开木头。因此,答案是D,即斜面。
二、多选题
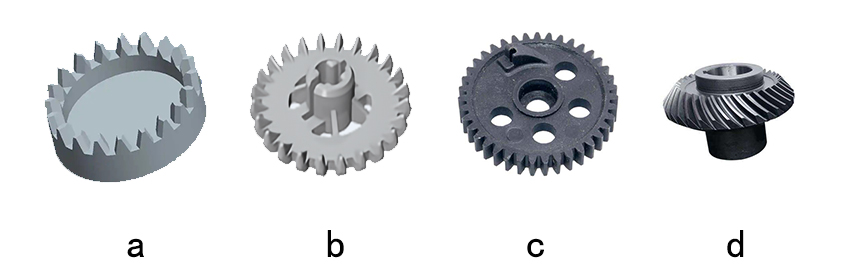
31、下列哪些图片是冠齿轮?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】题目要求从给出的图片中找出冠齿轮。冠齿轮,也被称为链轮或链条轮,通常用于链条传动的系统中。它们通常具有凸起的齿形,这些齿用于与链条的销钉啮合,从而实现动力传递。分析各选项的图片:A选项:图片中展示的是一个具有多个齿的齿轮,这些齿呈现出凸起的形状,与冠齿轮的特征相符。B选项:图片中的齿轮同样具有凸起的齿形,与链条的销钉相配合,符合冠齿轮的定义。C选项:图片中的齿轮齿形是平面的,没有凸起的齿,与冠齿轮的特征不符。D选项:图片中的齿轮齿形虽然也是凸起的,但齿形与冠齿轮的齿形有所不同,更像是普通齿轮。综上所述,A选项和B选项的图片是冠齿轮。
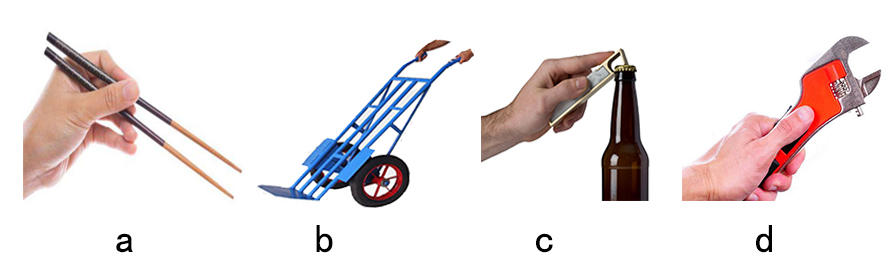
32、使用下列工具能省力的有哪些?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到四个工具,其中b和c和d工具的设计都是为了省力。b工具是一个杠杆,通过改变力的方向和大小,可以省力;c工具是一个斜面,通过改变力的方向,使得较小的力可以移动较大的物体;d工具是一个滑轮,通过改变力的方向,可以省力。而a工具看起来并没有省力的设计,因此,能省力的工具有b、c和d。
33、机器人的驱动方式主要有哪些?( )
A、液压
B、气动
C、电动
D、手动
解析:【喵呜刷题小喵解析】:机器人的驱动方式主要有液压、气动和电动三种。液压驱动利用液体压力来驱动机器人的运动,适用于需要大力和大行程的场合;气动驱动则是利用气体压力来驱动机器人的运动,适用于需要快速响应和频繁动作的场合;电动驱动则是利用电动机来驱动机器人的运动,适用于需要精确控制和低噪音的场合。手动驱动不属于机器人的驱动方式,因此不选D。
34、杠杆的分类有哪些?( )
A、省力杠杆
B、费力杠杆
C、等臂杠杆
D、弯曲杠杆
解析:【喵呜刷题小喵解析】:杠杆的分类主要有省力杠杆、费力杠杆和等臂杠杆。弯曲杠杆并不是一个标准的杠杆分类,因此不应选入。省力杠杆是指在使用时能够省力,费力杠杆是指在使用时需要费力,等臂杠杆则是指在使用时既不省力也不省力,但可以改变力的方向。因此,选项nA、nB和nC是正确的。
35、下列传动方式可以准确无误地传递动力的有哪些?( )
A、齿轮平行传动
B、齿轮垂直传动
C、链传动
D、蜗轮蜗杆传动
解析:【喵呜刷题小喵解析】:齿轮平行传动、齿轮垂直传动、链传动和蜗轮蜗杆传动都是准确无误地传递动力的传动方式。齿轮平行传动和齿轮垂直传动通过齿轮之间的啮合来实现动力的传递,而链传动则是通过链条和链轮之间的配合来实现动力的传递。蜗轮蜗杆传动则是通过蜗杆和蜗轮之间的啮合来实现动力的传递。这些传动方式都能实现动力的准确无误地传递。
三、判断题
36、定滑轮的本质是等臂杠杆。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:定滑轮的本质是等臂杠杆,这是正确的。定滑轮是一个等臂杠杆,它的两个力臂长度相等,因此它不会改变力的方向,但会改变力的运动方向。定滑轮的主要作用是改变力的方向,使得力可以沿着不同的路径施加。因此,选项A是正确的。
37、链传动中两个链轮转向相同。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在链传动中,两个链轮转向相同。这是因为链轮通过链条连接,链条在链轮上沿着相同的方向运动,因此两个链轮的转向必须相同,以确保链条能够平稳地传递动力。因此,答案为A,正确。
38、一个物体的稳定性与它的颜色有关。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:稳定性是指物体在受到外力作用时保持平衡的能力,与物体的颜色无关。颜色只是物体表面反射或吸收光线的特性,不会影响到物体的稳定性。因此,题目的陈述是不正确的。
39、轮轴只能省力。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:轮轴是一种简单机械,它可以改变力的方向和大小。当轮轴用于省力时,需要满足一定的条件,即在使用轮轴时,动力作用在轮上,而阻力作用在轴上。在这种情况下,轮轴可以省力。但是,如果动力作用在轴上,而阻力作用在轮上,那么轮轴并不能省力,反而会省距离。因此,轮轴并不是只能省力,它也可以省距离。所以,题目中的说法是不准确的,答案为B,即错误。
40、动滑轮只能用来省力。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:动滑轮不仅用来省力,还能改变力的方向。因此,说动滑轮只能用来省力是不准确的。所以,题目中的说法是错误的,答案应选B。
41、能量之间不能相互转化。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:能量之间是可以相互转化的。能量转化是指能量从一种形式转化为另一种形式的过程。例如,电能可以转化为热能,热能可以转化为机械能,机械能也可以转化为电能等。因此,题目中的说法是错误的。
42、齿轮平行啮合两个轮的转向相同。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:齿轮平行啮合时,两个轮的转向是相反的,而不是相同的。这是齿轮啮合的基本原理。因此,题目的陈述是错误的。
43、吹风扇凉快是因为风扇吹出的是冷风。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:风扇吹出的风并不是冷风,而是将周围的空气加速流动,使得汗水蒸发加快,带走热量,使人感觉凉爽。因此,吹风扇凉快并不是因为风扇吹出的是冷风,而是因为风扇加速空气流动,使汗水蒸发加快,带走热量。所以,题目的说法是错误的。
44、机器人一定有机械腿。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:这个问题是一个判断题,需要判断“机器人一定有机械腿”这个陈述是否正确。实际上,机器人并不一定需要机械腿才能行动或移动。机器人可以通过其他方式,如轮子、履带、喷射等方式来移动。因此,这个陈述是不正确的,答案应该选择B。
45、生活中只有省力杠杆。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:生活中并不是只有省力杠杆,还有省距杠杆和等臂杠杆。省力杠杆是指在使用时能够省力,即在动力臂大于阻力臂的情况下,使用较小的力就能移动较大的物体。但是,除了省力杠杆,还有省距杠杆和等臂杠杆。省距杠杆是指在使用时能够省距离,即在动力臂小于阻力臂的情况下,移动较小的距离就能完成较大的工作。等臂杠杆则是指动力臂等于阻力臂,既不省力也不省距离,但可以改变力的方向。因此,生活中不仅有省力杠杆,还有其他类型的杠杆。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




