



一、单选题
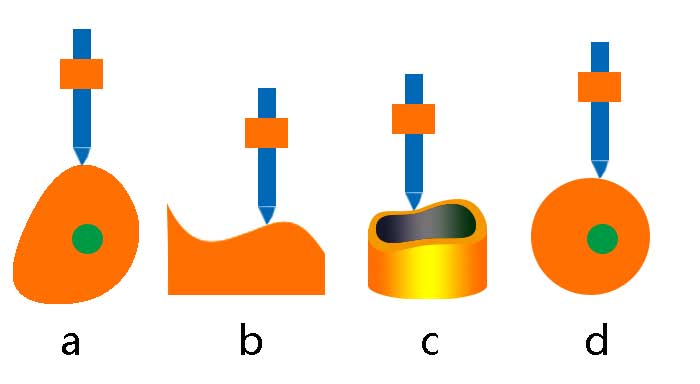
1、下图中的凸轮机构使用了摆动型从动件的是?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:在题目给出的图片中,我们可以看到凸轮机构中从动件的形状。从动件呈现的是一种摆动式的设计,因此正确选项是D。这种摆动型从动件在凸轮机构中能够完成往复的摆动动作,实现特定的机械运动要求。因此,答案为D。
2、如图关于该装置说法正确的是?( )

A、这是蜗轮蜗杆机构
B、这是齿轮传动
C、这是链传动
D、这是皮带传动
解析:【喵呜刷题陈老师解析】题目中的装置是一个典型的皮带传动装置,它使用皮带作为动力传输的媒介。皮带传动是四大基本传动方式之一,与齿轮传动、链传动和蜗轮蜗杆传动并列。因此,选项D“这是皮带传动”是正确的。
3、如图关于该机构说法正确的是?( )

A、这是棘轮机构
B、a是主动件
C、b是主动件
D、这是凸轮机构
解析:【喵呜刷题小喵解析】根据图片信息,该机构是一个棘轮机构,棘轮机构中,棘轮是被动件,棘爪是主动件,推动棘爪动作的是主动件,棘爪带动棘轮转动。所以选项C正确,b是主动件。其他选项错误,这不是凸轮机构,a也不是主动件。
4、如图,曲柄滑块机构中的滑块做什么动作?( )

A、沿着轨道来回滑动
B、圆周运动
C、静止不动
D、无规律运动
解析:【喵呜刷题小喵解析】:根据题目中的图片,曲柄滑块机构中的滑块沿着轨道来回滑动。因此,正确答案是A,即滑块沿着轨道来回滑动。
5、一节干电池的电压约为?( )
A、1.5V
B、1000v
C、36V
D、220V
解析:【喵呜刷题小喵解析】:一节干电池的电压约为1.5V。这是电池的基本电压,用于为各种小型电子设备提供电力。其他选项中的电压值要么过高(如1000v、36V、220V),要么单位错误(如nA,即纳安,是电流的单位,不是电压的单位)。因此,正确答案是A选项,即1.5V。
6、同一地点,以下常见物品哪个受到的重力最大?( )
A、一个橡皮
B、一把尺子
C、一支铅笔
D、一张桌子
解析:【喵呜刷题小喵解析】根据题目,我们需要比较同一地点下,一个橡皮、一把尺子、一支铅笔和一张桌子这四个物品中哪个受到的重力最大。首先,我们要明确重力是由于地球对物体的吸引而产生的力,因此重力的大小与物体的质量成正比。在这四个选项中,一张桌子的质量明显大于一个橡皮、一把尺子或一支铅笔的质量。因此,一张桌子受到的重力最大。所以,正确答案是D,即一张桌子。
7、关于能量说法错误的是?( )
A、电动机可以将电能转化为机械能
B、发电机可以将机械能转化为电能
C、冰块放在额头上,可以实现内能传递,让人感到凉快
D、能量是不能相互转化的
解析:【喵呜刷题小喵解析】:A选项正确,电动机可以将电能转化为机械能,这是电动机的基本工作原理。B选项正确,发电机可以将机械能转化为电能,这是发电机的基本工作原理。C选项正确,冰块放在额头上,由于冰块温度低,会吸收人额头上的热量,使人的内能减少,感到凉快,这是内能传递的表现。D选项错误,能量是可以相互转化的,例如电能可以转化为机械能,机械能可以转化为电能,内能也可以转化为其他形式的能量。因此,D选项说法错误。
8、如图,该机构中主动棘爪是指?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】根据棘爪在机构中的功能,主动棘爪是指驱动棘轮转动的棘爪。从图中可以看出,主动棘爪是与驱动源相连的,用于驱动棘轮转动。因此,正确答案为A。
9、如图该机构的锁合方式为?( )

A、重力锁合
B、几何锁合
C、弹力锁合
D、槽凸轮机构锁合
解析:【喵呜刷题小喵解析】:从提供的图片中无法直接观察出该机构的锁合方式,但根据常见的机构知识,一般机构的锁合方式有重力锁合、几何锁合和弹力锁合。在重力锁合中,机构依靠重力的作用实现锁定;在几何锁合中,机构通过几何形状的配合实现锁定;在弹力锁合中,机构利用弹性元件的弹力实现锁定。根据题目给出的选项,槽凸轮机构锁合并不在选项中,因此无法选择。在没有更多信息的情况下,我们可以推测该机构的锁合方式可能是弹力锁合,因为弹力锁合是一种常见且有效的锁合方式。因此,正确答案是C,即弹力锁合。
10、一个六足机器人,用左右两个电机分别控制左右各三足,左侧电机转速是200rpm,右侧电机转速是50rpm,则此机器人?( )
A、原地左转
B、向右前方转向
C、原地右转
D、原地不动
解析:【喵呜刷题小喵解析】根据题目描述,一个六足机器人,用左右两个电机分别控制左右各三足。左侧电机转速是200rpm,右侧电机转速是50rpm。机器人需要保持平衡并前进,左右两侧的转速不同会导致机器人向一侧倾斜,进而实现转向。由于左侧转速高于右侧,机器人会向左倾斜,从而实现向右前方的转向。因此,答案是B,即向右前方转向。
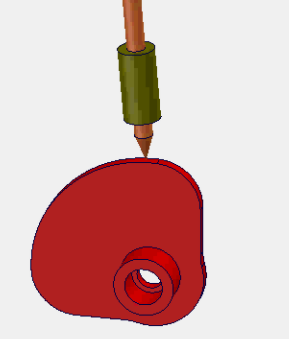
11、如图关于该凸轮机构的从动件,说法正确的是?( )

A、这是尖顶从动件
B、这是滚子从动件
C、这是平底从动件
D、这是方形从动件
解析:【喵呜刷题小喵解析】:从图片中可以看到,该凸轮机构的从动件是一个圆柱形的滚子,因此选项B“这是滚子从动件”是正确的。选项A“这是尖顶从动件”、选项C“这是平底从动件”和选项D“这是方形从动件”都与图片中的从动件形状不符,因此是错误的。
12、下图为飞机起飞时的机翼示意图,说法正确的是?( )

A、机翼上侧曲线弧度大于下侧
B、机翼周围没有气压
C、机翼上侧所受的气压为0
D、机翼下侧所受的气压为0
解析:【喵呜刷题小喵解析】机翼上侧曲线弧度大于下侧,这是飞机起飞时机翼的基本结构特点。这种设计使得机翼上侧的空气流速更快,进而产生向下的压力差,使得飞机获得升力。机翼周围是有气压的,并且机翼上侧和下侧都受到气压的作用,但由于流速不同,两侧的气压存在差异。因此,选项A“机翼上侧曲线弧度大于下侧”是正确的说法。选项B、C、D的说法都是错误的。
13、“木牛流马”是由谁发明的?( )
A、张衡
B、祖冲之
C、诸葛亮
D、苏颂
解析:【喵呜刷题小喵解析】:“木牛流马”是三国时期蜀汉丞相诸葛亮发明的运输工具,分为木牛与流马。木牛是一种人力独轮车,流马其实是一种改良后的运输车。因此,正确答案为“诸葛亮”。选项A张衡是东汉时期的天文学家、地震学家,选项B祖冲之是南北朝时期的数学家、天文学家,选项D苏颂是北宋时期的天文学家,他们都没有发明“木牛流马”。
14、下列可以产生滑动摩擦力的情形是?( )
A、物体静止在桌子上
B、物体静止在斜面上
C、物体悬挂在空中
D、物体在桌面上滑动
解析:【喵呜刷题小喵解析】滑动摩擦力是两个相互接触的物体之间,当它们有相对运动或相对运动的趋势时,在接触面上产生的阻碍它们相对运动的力。因此,只有物体在接触面上有相对运动或相对运动的趋势时,才会产生滑动摩擦力。选项A、B、C中的物体都没有与接触面有相对运动或相对运动的趋势,因此不会产生滑动摩擦力。而选项D中的物体在桌面上滑动,与桌面有相对运动,因此会产生滑动摩擦力。因此,正确答案是D。
15、如图,关于自行车说法正确的是?( )

A、a处采用平行四边形框架来增加结构稳定
B、b处有花纹是为了减小与地面的摩擦
C、c处采用了皮带传动
D、c处采用了链传动
解析:【喵呜刷题小喵解析】观察自行车各部件的设计,我们可以分析出以下结论:A选项:平行四边形框架确实在自行车中有所应用,例如前后轮的叉形支架。但平行四边形框架主要是为了增加转动部件的转动灵活性,而不是结构稳定性。所以A选项错误。B选项:b处的花纹设计,其主要目的是增大与地面的摩擦,而非减小。这些花纹可以增加轮胎与地面之间的摩擦力,从而防止打滑。因此,B选项错误。C选项:自行车后轮确实采用了皮带传动,但这主要指的是链条。链条是连接踏板上的踏板轴和后轮上的飞轮的关键部件,它传递了骑行者的力量,使自行车能够前进。但题目中提到的“c处采用了皮带传动”是不准确的,因为自行车后轮使用的是链条,而不是皮带。所以C选项错误。D选项:c处确实采用了链传动,这是自行车后轮动力传递的关键部分。链条连接了踏板轴和飞轮,使得骑行者的力量能够传递到后轮,使自行车前进。因此,D选项正确。
16、如图关于该凸轮机构,说法正确的是?( )

A、这是槽凸轮机构
B、这是共轭凸轮机构
C、这是等径凸轮机构
D、这是等宽凸轮机构
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以观察到该凸轮机构具有槽形轮廓。槽形轮廓是槽凸轮机构的特点,因此选项A“这是槽凸轮机构”是正确的。选项B“这是共轭凸轮机构”、选项C“这是等径凸轮机构”和选项D“这是等宽凸轮机构”均与该凸轮机构的实际特点不符,因此是错误的。
17、如图,静止在斜面上的物体,受到的向下垂直于地面的力是?( )

A、重力
B、滑动摩擦力
C、静摩擦力
D、斜面给物体的支持力
解析:【喵呜刷题小喵解析】:在斜面上静止的物体,受到的重力方向是竖直向下的,而垂直于地面的力即为重力。因此,答案是重力。滑动摩擦力、静摩擦力和斜面给物体的支持力都不是垂直于地面的力。
18、下图中哪个是皮带交叉传动?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:从给出的图片中,我们可以看到四个不同的传动装置。根据题目描述,我们需要找出皮带交叉传动的装置。从图中可以看出,选项C的装置中,皮带是交叉传动的,而其它三个选项中的皮带都是直线传动的。因此,正确答案是C。
19、如图该机构中主动摆杆是指?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:根据提供的图片,机构中主动摆杆指的是连接驱动源(如电机)的摆杆,它负责传递动力并驱动其他部分运动。在图片中,主动摆杆连接了驱动源,并且驱动了从动摆杆的运动。因此,正确答案是B,即主动摆杆是b。
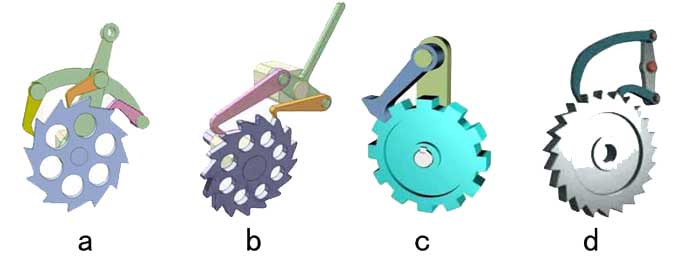
20、下列哪个是摩擦式棘轮机构?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:摩擦式棘轮机构通常利用摩擦原理来实现棘轮的单向运动。在提供的选项中,D选项与摩擦式棘轮机构的特性相符,因此是正确答案。其他选项(A、B、C)可能代表其他类型的棘轮机构,但题目中并未明确提及,因此D选项是正确答案。请注意,由于题目中只提供了图片,而没有文字描述,因此只能根据图片和常识来推断答案。如果题目中有更详细的描述或选项,答案可能会有所不同。
21、可以利用传感器等获取环境信息,然后利用智能技术识别、理解、推理,最后做出规划决策,自主行动,实现预定目标的高级机器人是?( )
A、示教再现型机器人
B、感知型机器人
C、智能机器人
D、工业机器人
解析:【喵呜刷题小喵解析】:题目中描述的高级机器人可以利用传感器等获取环境信息,然后利用智能技术识别、理解、推理,最后做出规划决策,自主行动,实现预定目标。这符合智能机器人的定义,即能够感知、理解、学习和规划,具有自主行动能力的机器人。而示教再现型机器人是通过示教进行操作的,不具备智能识别和理解的能力;感知型机器人只是具备感知能力,并不具备推理和规划能力;工业机器人是特定领域内进行操作的机器人,也不具备智能识别和理解的能力。因此,正确答案是智能机器人。
22、下列没有采用连杆机构的是?( )

A、a挖掘机
B、b机械臂
C、c三角板
D、d雨刷器
解析:【喵呜刷题小喵解析】:连杆机构是由一系列杆件通过关节连接而成的机构,用于实现运动传递和变换。挖掘机、机械臂和雨刷器都采用了连杆机构来实现其特定的运动功能。而三角板是一种几何绘图工具,主要用于绘制三角形,它并没有采用连杆机构。因此,没有采用连杆机构的是三角板,选项C是正确的。
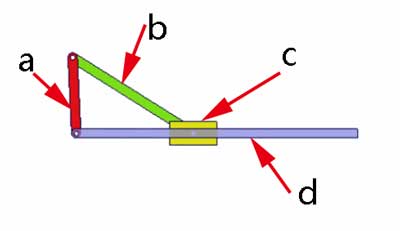
23、如图,该机构是曲柄摇杆机构,那么做左右摇摆动作的杆是?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】根据题目中的图片,我们可以清晰地看到机构中的两个杆,一个固定不动,另一个在做左右摇摆动作。根据曲柄摇杆机构的工作原理,做左右摇摆动作的杆是摇杆,因此答案为C。
24、如图关于双摇杆机构,说法正确的是?( )

A、a是基座
B、b是摇杆
C、c做摇摆动作
D、d是连杆
解析:【喵呜刷题小喵解析】根据题目中的图片,我们可以识别出各个部分:* a是基座:基座是固定不动的部分,图中并没有明确指出哪部分是基座。* b是摇杆:摇杆是可以摆动的部分,但题目中的图片并没有明确标出摇杆。* c做摇摆动作:从图片中可以看到,有一个部分在做摇摆动作,这部分应该是连杆。* d是连杆:题目中的图片中明确标出了连杆,且该部分在做摇摆动作,符合题目的描述。综上,题目中给出的关于双摇杆机构的说法,只有“c做摇摆动作”是正确的,因此正确答案是C。
25、下图中属于外啮合棘轮机构的是?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:根据棘轮机构的工作原理,外啮合棘轮机构是指棘轮与棘爪在棘轮的外部进行啮合。观察选项中的图片,只有选项A的棘轮机构满足这一条件,因此选项A是正确的。
26、东汉时期,张衡发明了“记里鼓车”用来?( )
A、测量行驶路程
B、击鼓娱乐
C、专门运送军用物资
D、表演鼓乐
解析:【喵呜刷题小喵解析】:记里鼓车是古代一种用于计算行驶路程的车辆,其工作原理是车轮每转动一圈,就通过齿轮等机构触发机关,使车上的鼓或铃响一次,从而记录下行驶的距离。因此,张衡发明的记里鼓车是用来测量行驶路程的,选项A正确。选项B击鼓娱乐、选项C专门运送军用物资、选项D表演鼓乐均不符合记里鼓车的实际功能。
27、如图这是什么机构?( )

A、平行双曲柄机构
B、反向双曲柄机构
C、曲柄摇杆机构
D、双摇杆机构
解析:【喵呜刷题小喵解析】:根据提供的图片,这个机构具有两个平行的曲柄,因此属于平行双曲柄机构。这种机构常用于实现特定的工作循环或往复运动,其运动特点是两个曲柄在同一平面上做同向转动,而与之相连的连杆则进行相应的往复运动。因此,正确答案是A,即平行双曲柄机构。
28、如图曲柄滑块机构中哪个部分做圆周运动?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】在曲柄滑块机构中,做圆周运动的部分是曲柄。曲柄滑块机构是一种将旋转运动转化为直线运动的机构,其中曲柄做圆周运动,滑块做直线运动。因此,选项A是正确的。
29、如图,关于该机构说法正确的是?( )
A、这是凸轮机构
B、这是棘轮机构
C、这是槽轮机构
D、这是连杆机构
解析:【喵呜刷题小喵解析】:观察图像,可以清晰地看到一个带有轮缘的圆形凸轮。在机构学中,凸轮机构由凸轮、从动件和机架三个基本构件组成。当凸轮以一定的角速度转动时,其轮缘上的廓面迫使从动件按预定规律运动,实现各种复杂的运动。因此,正确答案为A,即“这是凸轮机构”。棘轮机构、槽轮机构和连杆机构虽然都是常见的机械装置,但与题目中的图像不符。
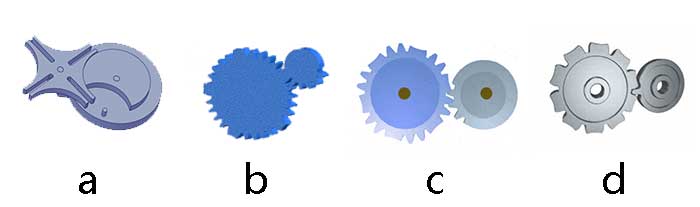
30、下图中哪个是槽轮机构?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:槽轮机构是一种常用的间歇运动机构,由主动槽轮、从动槽轮和机架组成。槽轮机构的主要特点是当主动槽轮转动时,从动槽轮会获得与槽数相等的转数,然后静止不动,再转动,再静止,如此周而复始地运动。根据题目中的图片,选项A的图形最符合槽轮机构的特征,因此答案为A。
二、多选题
31、下图中哪三个选项不是单动式棘轮机构?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】棘轮机构通常由棘轮、棘爪组成。棘轮机构具有结构简单、制造方便、工作可靠和效率较高等优点,因此在机械传动系统中得到广泛应用。棘轮机构根据棘爪的驱动方式可分为单动式棘轮机构和双动式棘轮机构。单动式棘轮机构是指棘爪由主动件驱动,棘轮只作单向间歇运动,即棘轮只被棘爪推动,棘爪回程时棘轮静止不动。根据棘轮机构的结构和工作原理,选项A、B、D均不符合单动式棘轮机构的特点,故正确选项为A、B、D。
32、下图凸轮机构中哪两个选项采用了盘形凸轮?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:从提供的图片来看,该凸轮机构中,a和d选项采用了盘形凸轮。因此,正确选项为A和D。
33、以下属于机器人组成部分的有?( )
A、机械部分
B、传感部分
C、控制部分
D、人类外形
解析:【喵呜刷题小喵解析】:机器人通常由机械部分、传感部分和控制部分组成。机械部分包括机器人的身体、关节和末端执行器等,用于实现机器人的各种动作。传感部分包括各种传感器,如距离传感器、力传感器、视觉传感器等,用于获取环境信息。控制部分则负责处理这些信息,并根据预设的程序或算法控制机器人的动作。而人类外形并不是机器人的必要组成部分,因此选项D是错误的。因此,正确答案是A、B、C。
34、下列哪两项是滑动摩擦力的产生条件?( )
A、两个物体相互接触
B、两个物体发生相对运动
C、两个物体颜色一致
D、两个物体气味一致
解析:【喵呜刷题小喵解析】滑动摩擦力是指两个物体之间因相对运动而产生的阻力,它的大小与两个物体的接触面之间的摩擦系数、接触面积、压力等因素有关。根据摩擦力的定义,我们知道产生滑动摩擦力的条件包括:1)两个物体相互接触;2)两个物体之间发生相对运动。因此,选项A“两个物体相互接触”和选项B“两个物体发生相对运动”都是滑动摩擦力的产生条件,所以正确答案为AB。选项C和选项D与滑动摩擦力的产生条件无关,故排除。
35、如图,说法正确的是?( )

A、这是齿轮传动
B、ab两轮转向相反
C、这是皮带平行传动
D、这是皮带交叉传动
解析:【喵呜刷题小喵解析】:根据图片信息,我们可以观察到以下几点:* 图片中显示的是两个皮带轮通过皮带连接在一起。* 皮带在两轮之间呈交叉状态,而不是平行状态。* 从皮带的方向来看,ab两轮转向是相反的。根据以上观察,我们可以得出以下结论:* 选项A:这是齿轮传动,与图片信息不符,因为图片中显示的是皮带传动,而不是齿轮传动。* 选项B:ab两轮转向相反,与图片信息相符,因为从皮带的方向来看,ab两轮转向是相反的。* 选项C:这是皮带平行传动,与图片信息不符,因为皮带在两轮之间呈交叉状态,而不是平行状态。* 选项D:这是皮带交叉传动,与图片信息相符,因为皮带在两轮之间呈交叉状态。因此,正确选项是B和D。
三、判断题
36、电能不可以转化为机械能。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在能量转换的过程中,电能可以转化为机械能。例如,电动机就是将电能转化为机械能的设备。因此,这个判断是错误的。
37、小的物品不受重力作用。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:本题考察的是对重力的理解。重力是由于地球对物体的吸引而产生的力,它作用于所有物体,不论其大小。因此,小的物品同样受到重力作用。所以,选项A“小的物品不受重力作用”是错误的,正确答案是B。
38、机器人一定会说汉语。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:机器人是否能说汉语取决于其设计和编程。虽然一些机器人可能具有与人类交流的能力,但这并不意味着它们一定会说汉语。它们可能只被编程为理解和产生特定的语言,或者它们可能具有多语言能力,但不一定包括汉语。因此,说机器人一定会说汉语是不准确的,答案为B。
39、自行车采用了链传动。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:自行车是一种通过脚踏板驱动链条和齿轮,从而推动车轮前进的交通工具。链传动是自行车中非常重要的一个组成部分,它通过链条将脚踏板的动力传递给车轮,使自行车得以行驶。因此,题目中的陈述“自行车采用了链传动”是正确的。
40、有的机械可以省功。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:根据热力学第二定律,封闭系统的熵(即系统的无序程度)不会减少,所以不可能从单一热源取得动力而使之完全变为机械功,而不产生其他影响。这表示不可能从单一热源取得动力,使之完全变为机械功,而不产生其他效果。也就是说,不存在机械可以省功,所以本题答案为B。
41、皮带传动相比齿轮传动来说更适用于远距离传动。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:皮带传动相比齿轮传动更适合于远距离传动。皮带传动通过皮带将动力从一个轴传递到另一个轴,皮带可以绕过滑轮或皮带轮进行传动,因此可以适用于较远的距离。而齿轮传动则需要两个齿轮直接啮合,因此适用于近距离传动。因此,皮带传动相比齿轮传动更适合于远距离传动,所以答案是A。
42、滑杆机构中回转体做回转动作。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:滑杆机构是一种将直线运动转化为回转运动的机构,通常由滑块、滑杆和滑块座等部分组成。在滑杆机构中,当滑块沿着滑杆移动时,滑块座上的回转体会做回转动作,从而实现将直线运动转化为回转运动的功能。因此,滑杆机构中回转体做回转动作的说法是正确的,答案选A。
43、皮带传动容易出现打滑现象。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:皮带传动中,如果皮带与皮带轮之间的摩擦力不足以传递所需的功率,皮带就会在皮带轮上打滑。打滑现象是皮带传动中常见的问题,因此题目中的陈述是正确的。
44、机器人三定律允许机器人伤害人类。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:机器人三定律是科幻作品中的一个概念,由伊萨克·阿西莫夫提出。这三条定律是:一、机器人不得伤害人类,也不得因不采取行动而让人类受到伤害;二、机器人必须服从人类的命令,但前提是这些命令不与第一定律相冲突;三、机器人必须保护自身的存在,但前提是这不与第一定律和第二定律相冲突。从这三条定律可以看出,机器人被明确禁止伤害人类。因此,题目中的说法“机器人三定律允许机器人伤害人类”是错误的。
45、“行星齿轮”可以让装置实现一边自转一边围绕旋转中心公转。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:行星齿轮是齿轮传动的一种形式,行星齿轮传动中,行星轮以齿轮组为中心旋转,同时绕旋转中心公转。这种结构允许行星轮一边自转一边围绕旋转中心公转,因此题目的说法是正确的。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




