



一、单选题
1、关于后轮驱动车说法正确的是?( )
A、发动机放在车的后部
B、起步加速比前轮驱动车更好
C、传动效率比前轮驱动车高
D、与前轮驱动车比转向不足
解析:【喵呜刷题小喵解析】:后轮驱动车是指发动机的动力通过传动轴传递给后轮,从而推动车辆前进。这种驱动方式在起步加速时,由于后轮是驱动轮,所以起步加速性能通常比前轮驱动车更好。因此,选项B“起步加速比前轮驱动车更好”是正确的说法。而选项A“发动机放在车的后部”并不准确,因为发动机可以放在车的前部或后部,取决于具体的车型设计。选项C“传动效率比前轮驱动车高”没有明确的证据支持,而且传动效率还受到其他因素的影响,如传动系统的设计和制造质量。选项D“与前轮驱动车比转向不足”也不准确,转向不足是车辆行驶中可能出现的一种现象,与驱动方式没有直接关系。因此,正确答案是B。
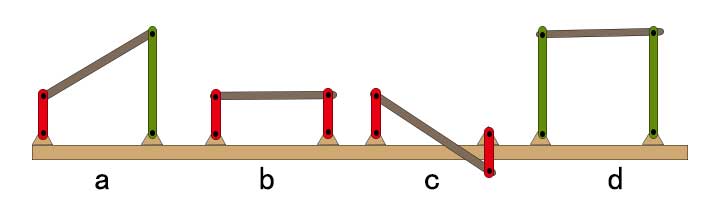
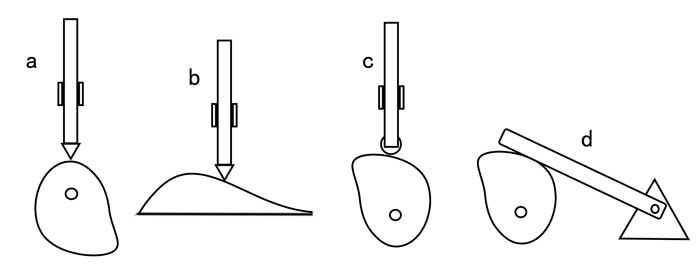
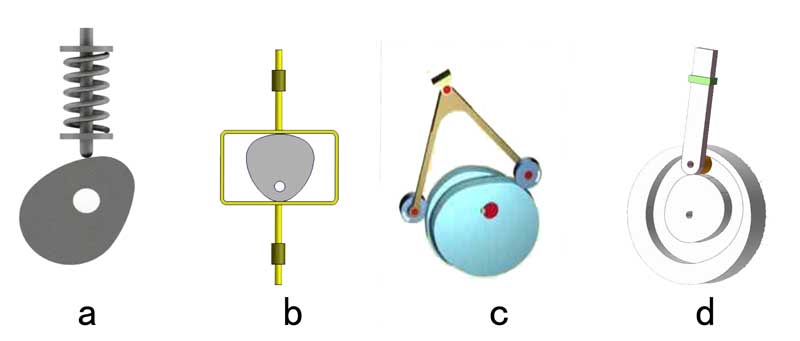
2、下图中哪个是反向双曲柄机构?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】反向双曲柄机构指的是曲柄与曲柄之间反向连接的机构。从给出的图中,我们可以看到,只有选项C的两个曲柄是反向连接的,符合反向双曲柄机构的定义。因此,正确答案是C。
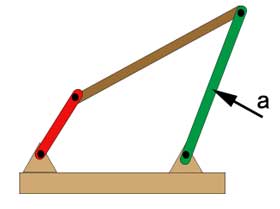
3、如图,该机构中a杆做什么动作?( )
A、回转运动
B、上下直动
C、左右摇摆
D、沿轨道滑动
解析:【喵呜刷题小喵解析】根据提供的图片,机构中a杆呈现左右摇摆的动作,因此正确答案为左右摇摆。选项A“回转运动”描述的是物体绕固定点旋转的动作,与图片不符;选项B“上下直动”描述的是物体沿垂直方向直线运动,与图片不符;选项D“沿轨道滑动”描述的是物体沿特定轨道移动,与图片也不符。因此,正确答案为C“左右摇摆”。
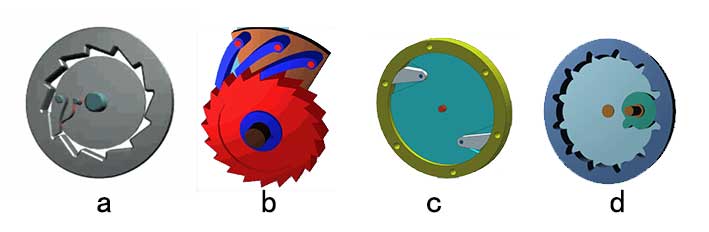
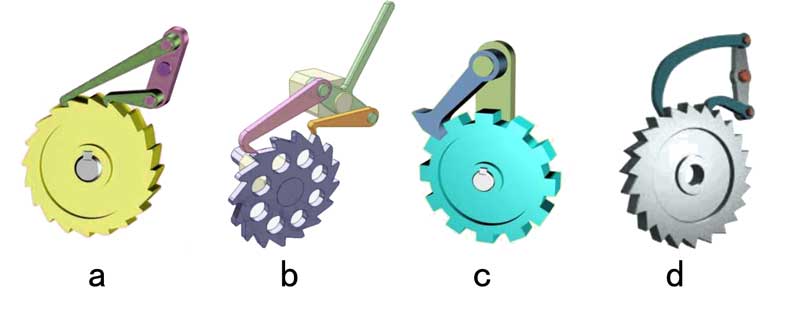
4、下图中哪个机构是外啮合棘轮?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到四个选项,每个选项都代表一个棘轮机构。外啮合棘轮机构是指棘轮与棘爪通过外表面进行啮合,而不是通过内表面。在给出的选项中,选项B的棘轮机构符合外啮合棘轮的定义,因此选项B是正确答案。
5、“木牛流马”是谁发明的?( )
A、张衡
B、祖冲之
C、诸葛亮
D、曹雪芹
解析:【喵呜刷题小喵解析】:“木牛流马”是三国时期蜀汉丞相诸葛亮发明的运输工具,分为木牛与流马。木牛是一种人力独轮车,流马其实是一种运粮船。因此,正确答案为“诸葛亮”。选项A张衡是东汉时期的天文学家、地理学家、数学家、发明家、文学家,选项B祖冲之是南北朝时期杰出的数学家、天文学家,选项D曹雪芹是清代作家,创作了《红楼梦》等作品,均与“木牛流马”的发明无关。
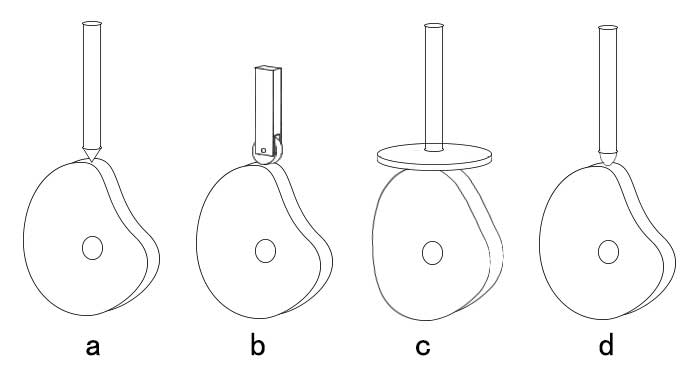
6、下图中哪个机构采用了平底从动件?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:根据题目中的图片,平底从动件是机构中用于传递动力或运动的部件,其形状为平面或近平面的结构。在给出的选项中,只有选项C中的机构采用了平底从动件,因此正确答案为C。
7、放置在同一水平地面上的下列常见物品,重力最大的是?( )
A、一粒芝麻
B、一个苹果
C、一个西瓜
D、一块橡皮
解析:【喵呜刷题小喵解析】要比较重力的大小,需要知道每个物品的质量。质量是指物体所含物质的多少,是物体本身的一种属性,只与物体所含物质的多少有关,不随其位置、形状、状态和温度的改变而改变。题目中并未给出每个物品的具体质量,但根据常识,西瓜的质量明显大于苹果,苹果的质量又大于芝麻,橡皮的质量最小。因此,重力最大的物品是一个西瓜。
8、下列属于棘轮机构的零件是?( )
A、凸轮
B、主动棘爪
C、带槽的部件
D、带圆销的部件
解析:【喵呜刷题小喵解析】:棘轮机构是一种常用的间歇运动机构,主要由带槽的部件和棘爪组成。棘爪通过与带槽的部件上的棘轮槽配合,实现间歇运动。主动棘爪是棘轮机构中用于推动棘轮转动的零件,因此,主动棘爪是棘轮机构的一部分。而凸轮、带圆销的部件并不是棘轮机构的典型零件。带槽的部件是棘轮机构中的另一个关键部分,但题目中并未将其作为选项列出。因此,正确答案是主动棘爪,即选项nB。
9、关于蜗轮蜗杆机构说法正确的是?( )
A、容易打滑
B、传动比无法计算
C、适合远距离传动
D、蜗杆是主动件
解析:【喵呜刷题小喵解析】在蜗轮蜗杆机构中,蜗杆是主动件,它通过旋转来驱动蜗轮转动,因此选项D“蜗杆是主动件”是正确的。蜗轮蜗杆机构传动比的计算是可以通过相关公式实现的,因此选项nB“传动比无法计算”是错误的。蜗轮蜗杆机构由于具有较大的传动比和较低的噪声,常用于需要减速和消声的场合,因此适合近距离传动,而不是远距离传动,所以选项nC“适合远距离传动”是错误的。蜗轮蜗杆机构在传动过程中,由于蜗杆和蜗轮之间的摩擦系数较大,因此不容易打滑,所以选项nA“容易打滑”也是错误的。
10、下图中哪个凸轮机构用了摆动型从动件?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以观察到四个不同的凸轮机构。其中,选项A、B、C的凸轮机构从动件都是移动型的,而从动件在选项D中是摆动型的。因此,正确答案是D。
11、如图该机构运转时回转体的动作是?( )
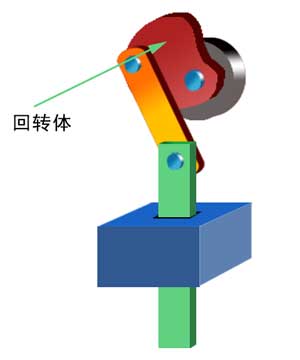
A、在轨道内滑动
B、来回摇摆
C、等速回转
D、静止不动
解析:【喵呜刷题小喵解析】根据题目中的图片,该机构运转时回转体的动作是等速回转。图片中显示回转体在运转时,其动作是匀速旋转,因此正确选项为C。其他选项如A、B、D均不符合图片中回转体的动作。
12、下图为飞机准备起飞时的机翼示意图,说法正确的是?( )
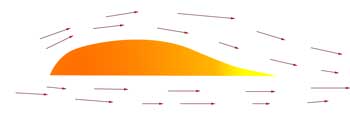
A、机翼上侧曲线弧度小于下侧
B、机翼上侧气流速度比下侧慢
C、机翼上侧所受的气压为0
D、机翼上侧所受的气压小于下侧
解析:【喵呜刷题小喵解析】机翼上侧曲线弧度大于下侧,气流在机翼上侧流速快,压强小,机翼下侧流速慢,压强大,机翼上下表面存在压强差,从而产生升力。因此,机翼上侧所受的气压小于下侧,选项D正确。选项A、B、C的说法均不符合空气动力学原理,是错误的。
13、下图中哪个是单动式棘轮机构?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】根据提供的图片信息,我们需要判断哪个是单动式棘轮机构。在提供的选项中,A、B、D均为棘轮机构,但无法判断它们是否为单动式。然而,C选项明显为单动式棘轮机构,因为棘轮上只有一个棘爪,与棘轮的棘齿配合实现单向运动。因此,答案为C。
14、如图,关于自行车说法错误的是?( )
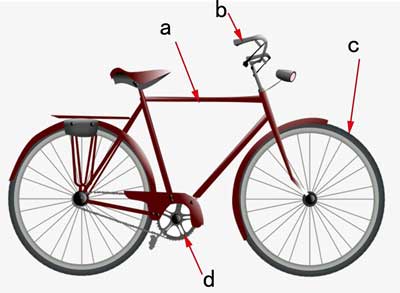
A、a处采用三角形框架来增加结构稳定
B、b处是轮轴的变形
C、c处有花纹是为了减小与地面的摩擦
D、d处采用了链传动
解析:【喵呜刷题小喵解析】对于自行车的各个部分,我们进行以下分析:A选项提到“a处采用三角形框架来增加结构稳定”。这是正确的,三角形框架由于其几何特性,能够提供良好的稳定性,常用于支撑结构。B选项提到“b处是轮轴的变形”。这也是正确的,轮轴是自行车的重要部分,用于传递力和运动。b处是轮轴的一部分,其变形(例如曲柄)有助于将踏力转化为驱动自行车前进的力。D选项提到“d处采用了链传动”。这也是正确的,自行车通过链条将踏力从曲柄传递到后轮,从而推动自行车前进。而C选项提到“c处有花纹是为了减小与地面的摩擦”。这是错误的。实际上,c处的花纹(通常称为轮胎花纹)是为了增加与地面的摩擦,提供更好的抓地力,防止打滑。因此,错误的选项是C。
15、如图该机构中回转体是?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到机构中有一个回转体。在选项中,A选项表示“回转体是a”,与题目中的图片相符。因此,正确答案是A。
16、如图这是北宋时期苏颂等人制作的木构水运仪像台,下列正确的是?( )

A、它是当时世界上最先进的天文钟
B、它用于计量车的行驶里程
C、它用于运输军用物资
D、它用于引水灌溉
解析:【喵呜刷题小喵解析】:北宋时期苏颂等人制作的木构水运仪像台是当时世界上最先进的天文钟。因此,选项A是正确的。选项B、C、D都与木构水运仪像台的实际用途不符。
17、中国家庭常用电压是多少?( )
A、1.5V
B、2V
C、36V
D、220V
解析:【喵呜刷题小喵解析】:在中国,家庭常用的电压是220V。这是因为中国电网的标准电压是220V,用于家庭用电。其他选项如1.5V、2V和36V通常用于特定设备或电池,而不是家庭常用电压。因此,正确答案是D,即220V。
18、下列凸轮机构属于弹力锁合的是? ( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到四个选项,每个选项都对应一个凸轮机构。其中,选项A的凸轮机构在凸轮的轮廓上设计有锁合面,当从动件到达锁合面时,由于弹簧的作用,从动件会紧压在锁合面上,从而实现锁合。这种锁合方式是通过弹力实现的,因此属于弹力锁合。选项B、C、D的凸轮机构没有显示出明显的锁合面,因此不属于弹力锁合。因此,正确答案是A。
19、第三代机器人指的是?( )
A、示教再现型机器人
B、感知型机器人
C、智能机器人
D、工业机器人
解析:【喵呜刷题小喵解析】:第三代机器人指的是智能机器人,这种机器人具有一定的智能和学习能力,可以适应不同的环境和任务。A选项示教再现型机器人是一种早期类型的机器人,它们只能按照预先设定的程序进行重复性的工作。B选项感知型机器人则是指具有感知能力的机器人,它们可以感知外界环境和物体,但通常缺乏自主决策和学习能力。D选项工业机器人则是一种专门用于工业生产的机器人,它们可以执行特定的任务,但通常缺乏智能和学习能力。因此,正确答案是C选项,即智能机器人。
20、关于内啮合棘轮机构说法正确的是?( )
A、能够节省空间
B、维修拆装简单
C、不能实现间歇运动
D、棘爪只能用齿式棘爪不能用摩擦式棘爪
解析:【喵呜刷题小喵解析】棘轮机构由棘轮和棘爪组成,棘轮有轮齿,棘爪有爪齿,棘爪作用于棘轮的轮齿上限制棘轮的转动方向,以实现间歇运动。内啮合棘轮机构是棘轮和棘爪在内部啮合,能够节省空间,维修拆装简单。因此,选项A“能够节省空间”和选项B“维修拆装简单”是正确的。选项C“不能实现间歇运动”是错误的,因为棘轮机构的主要功能就是实现间歇运动。选项D“棘爪只能用齿式棘爪不能用摩擦式棘爪”也是错误的,棘爪既可以用齿式也可以用摩擦式,具体取决于设计需求。
21、雨刷器主要应用了什么机构?( )
A、连杆机构
B、槽轮机构
C、棘轮机构
D、凸轮机构
解析:【喵呜刷题小喵解析】:雨刷器主要应用了连杆机构。连杆机构是一种通过杆件之间的铰接来实现运动传递和变换的机构。在雨刷器中,通过连杆机构将电机的旋转运动转换为雨刷臂的往复运动,从而实现雨刷的刮刷功能。槽轮机构、棘轮机构和凸轮机构虽然也是常见的机械机构,但在雨刷器中并没有直接应用。因此,正确答案是A,连杆机构。
22、关于滑动摩擦力的产生条件说法最准确的是?( )
A、物体相互接触但无相对运动
B、物体不接触
C、物体相互接触且有相对运动趋势
D、物体相互接触且发生相对运动
解析:【喵呜刷题小喵解析】滑动摩擦力的产生条件是物体相互接触且发生相对运动。这是因为滑动摩擦力是在两个物体接触面上,由于一个物体相对于另一个物体有运动趋势或实际运动,而产生的阻碍它们相对运动的力。因此,选项D“物体相互接触且发生相对运动”是最准确的描述。选项A“物体相互接触但无相对运动”没有考虑到相对运动的存在,选项B“物体不接触”显然不符合滑动摩擦力的产生条件,选项C“物体相互接触且有相对运动趋势”虽然提到了相对运动趋势,但没有明确说明已经发生了相对运动,因此不够准确。
23、如图该装置中a是主动轮,下列说法正确的是?( )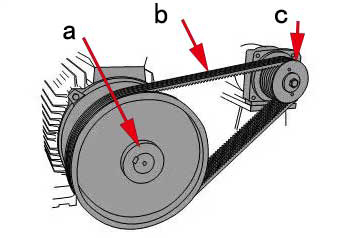
A、该装置起减速作用
B、这是齿轮传动
C、这是链传动
D、两轮转向相同
解析:【喵呜刷题陈老师解析】根据题目中的图片,该装置中a是主动轮,主动轮通过齿轮或链条带动其他轮子转动。观察图片,可以看出轮子之间通过齿轮连接,因此可以判断这是齿轮传动。齿轮传动的特点是两轮转向相同,因此选项D“两轮转向相同”是正确的。
24、如图,小朋友滑滑梯时没有受到的力是?( )

A、重力
B、下滑力
C、摩擦力
D、支持力
解析:【喵呜刷题小喵解析】小朋友滑滑梯时,没有受到下滑力。实际上,小朋友受到重力、摩擦力和支持力,而下滑力并不是一个真实的力,它是物体因重力作用沿斜面下滑时的一个效果,而不是一个与重力、摩擦力、支持力并列的力。所以,下滑力是不存在的,小朋友没有受到下滑力。
25、如图关于该机构说法正确的是?( )

A、a是主动件
B、这是不完全齿轮机构
C、这是凸轮机构
D、这是全齿齿轮啮合的机构
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到机构中有一个主动件,即A选项所描述的。同时,从图片中无法看出是不完全齿轮机构、凸轮机构还是全齿齿轮啮合的机构,因此B、C、D选项都不能确定是正确的。因此,正确答案是A。
26、一个机器小车,用左右两个电机分别控制左右车轮,左侧电机转速是120rpm,右侧电机转速是0,则此机器小车?( )
A、原地左转
B、向左前方转向
C、原地右转
D、原地不动
解析:【喵呜刷题小喵解析】根据题目描述,左侧电机转速是120rpm,右侧电机转速是0,这表示左侧车轮在转动,而右侧车轮不动。在这种情况下,机器小车会沿着左侧车轮的旋转方向转向,即向右转。因此,正确答案是“原地右转”。
27、关于连杆机构说法正确的是?( )
A、杆越多,运动的累计误差越小
B、不容易加工,制造精度低
C、属于高副机构
D、机械腿一般采用了连杆机构
解析:【喵呜刷题小喵解析】:对于给出的选项进行分析:A. 杆越多,运动的累计误差越小。这个选项是错误的。在连杆机构中,杆的数量增加并不一定会使运动的累计误差减小。实际上,过多的杆可能导致机构变得复杂,反而增加误差的可能性。B. 不容易加工,制造精度低。这个选项也没有明确的依据支持。连杆机构可以设计得相对简单,也可以设计得复杂。其加工和制造精度取决于具体的设计和制造过程,不能一概而论。C. 属于高副机构。这个选项是错误的。连杆机构通常是低副机构,通过铰链连接各个杆件。高副机构通常涉及滑动或滚动接触,如齿轮或凸轮机构。D. 机械腿一般采用了连杆机构。这个选项是正确的。机械腿,如人形机器人或工业机器人的腿部,经常采用连杆机构来实现复杂的运动。连杆机构能够提供多种运动模式,适应不同的环境和任务需求。综上所述,正确答案是D选项。
28、如图关于该机构说法正确的是?( )

A、这是齿轮平行啮合
B、这是齿轮垂直啮合
C、该机构传动比无法计算
D、该机构适合远距离传动
解析:【喵呜刷题小喵解析】:根据图片信息,该机构中齿轮的齿面呈垂直方向啮合,因此可以判断这是齿轮垂直啮合。齿轮垂直啮合常用于空间机构中,其传动比可以计算,也适合远距离传动。因此,选项B“这是齿轮垂直啮合”是正确的。选项A“这是齿轮平行啮合”与图片信息不符,选项C“该机构传动比无法计算”和选项D“该机构适合近距离传动”也与实际情况不符。
29、关于齿轮平行啮合说法正确的是?( )
A、两个轮转向相同
B、容易打滑
C、适合远距离传动
D、动力传递精准
解析:【喵呜刷题小喵解析】齿轮平行啮合时,两齿轮的轴必须保持平行。在这种情况下,动力传递精准,两齿轮转向也相同,有利于力的传递,减少打滑的可能性。对于远距离传动,齿轮平行啮合同样适用,但其主要的优点在于精准的动力传递。因此,正确选项为D,即“动力传递精准”。选项A描述了两齿轮的转向,但不是平行啮合的核心特点;选项B关于打滑的描述,与平行啮合的准确性相反;选项C虽然提到远距离传动,但并不是平行啮合的核心优势。
30、如图,该机构中棘轮是指?( )
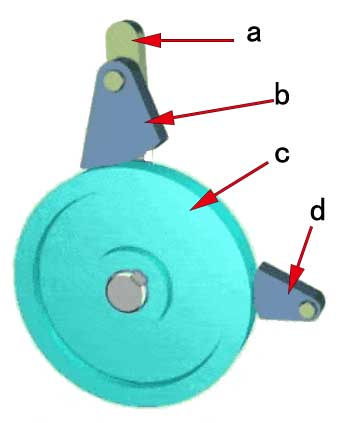
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】棘轮是指机构中用于单向锁定和解锁的部件,通常与棘爪配合使用。棘轮具有单向锁定功能,即只能向一个方向旋转,而在相反方向上则被锁定。棘轮通常用于需要单向运动的场合,如卷扬机、千斤顶等。根据题目中的图片,可以识别出棘轮是机构中的部件,因此选项C是正确的。
二、多选题
31、如图关于双摇杆机构说法正确的有?( )

A、a做摇摆动作
B、b起连接作用
C、c做摇摆动作
D、d是基座
解析:【喵呜刷题小喵解析】:根据题目中的图片,双摇杆机构由三个杆件组成,其中两个杆件做摇摆动作,另一个杆件起连接作用,并且整个机构以基座为固定点。因此,选项A、C表示做摇摆动作的两个杆件,选项B表示起连接作用的杆件,选项D表示基座,所以选项A、B、C、D都是正确的。
32、关于摩擦力说法正确的有哪些?( )
A、车轮是圆形的,是因为滚动摩擦更省力
B、滑动摩擦力的大小与接触面的粗糙程度有关
C、最大静摩擦力大于滑动摩擦力
D、摩擦力的大小与物品的颜色有关
解析:【喵呜刷题小喵解析】:选项A:车轮是圆形的,是因为滚动摩擦更省力。这个说法是正确的。滚动摩擦通常比滑动摩擦小,因此使用圆形车轮可以减少摩擦,使车辆更容易移动。选项B:滑动摩擦力的大小与接触面的粗糙程度有关。这个说法也是正确的。滑动摩擦力的大小与接触面的粗糙程度、接触面的材料和压力等因素有关。选项C:最大静摩擦力大于滑动摩擦力。这个说法也是正确的。静摩擦力是物体在静止状态下受到的摩擦力,而滑动摩擦力是物体在滑动状态下受到的摩擦力。在物体开始滑动之前,静摩擦力可以达到一个最大值,这个最大值通常大于滑动摩擦力。选项D:摩擦力的大小与物品的颜色有关。这个说法是不正确的。摩擦力的大小与物品的颜色无关,而是与接触面的粗糙程度、接触面的材料和压力等因素有关。
33、如图说法正确的有哪些?( )
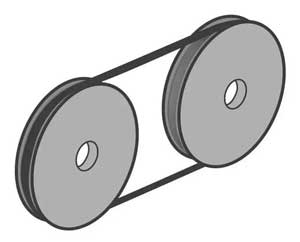
A、这是齿轮传动
B、该传动方式无法精确传递动力
C、这是皮带平行传动
D、这是皮带半交叉传动
解析:【喵呜刷题小喵解析】根据图片信息,该传动方式为齿轮传动,因此选项A“这是齿轮传动”是错误的。齿轮传动是一种精确传递动力的方式,因此选项B“该传动方式无法精确传递动力”也是错误的。选项C“这是皮带平行传动”和选项D“这是皮带半交叉传动”都是错误的,因为图片显示的是齿轮传动,而不是皮带传动。因此,正确答案是B。【注意】:本题为多选题,但根据喵呜AI的解析,只有选项B是正确的。可能是题目或选项存在错误,或者喵呜AI的解析有误。在实际答题时,请以原始题目和选项为准。
34、下列属于高副机构的是?( )
A、通过点接触的机构
B、通过面接触的机构
C、通过线接触的机构
D、两个不接触的机构
解析:【喵呜刷题小喵解析】:高副机构是指两构件通过点或线接触而构成的运动副。因此,选项A“通过点接触的机构”和选项C“通过线接触的机构”都属于高副机构。选项B“通过面接触的机构”是低副机构,而选项D“两个不接触的机构”不属于运动副,因此都不符合高副机构的定义。所以,正确答案是A和C。
35、下图中间歇运动机构有哪些?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:根据提供的图片,我们可以观察到间歇运动机构主要包括棘轮机构和槽轮机构。棘轮机构由棘轮和棘爪组成,棘爪在棘轮转动时与棘轮上的棘齿啮合,使棘轮做间歇运动。槽轮机构则是由主动槽轮、从动槽轮和机架组成,当主动槽轮转动时,从动槽轮会在特定位置与主动槽轮啮合,从而实现间歇运动。因此,选项A(棘轮机构)和选项C(槽轮机构)是正确的。选项D可能是指某种与间歇运动相关的机构或部件,但由于没有具体描述,无法确定其确切类型。选项B(摆动从动件机构)在图中并未明确显示,因此可以排除。因此,正确答案是ACD。
三、判断题
36、链传动相比齿轮传动来说更适用于远距离传动。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:链传动和齿轮传动都是常用的传动方式,但它们适用于不同的场景。链传动更适合用于远距离传动,因为它可以通过链条将动力从一个地方传递到另一个地方,而且链条的柔性可以适应一定的角度偏差,使得传动更加灵活。而齿轮传动则更适合用于近距离、高转速、高精度的传动场合,因为齿轮之间的啮合可以提供更稳定的传动效果。因此,题目中的说法是正确的。
37、电动机将电能转化为机械能。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:电动机是一种将电能转化为机械能的设备。当电流通过电动机的线圈时,会产生磁场,这个磁场会与电动机的转子相互作用,使转子转动,从而将电能转化为机械能。因此,题目中的说法是正确的。
38、所有物品的重力是一样的。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:物品的重力与其质量有关,质量不同,重力不同。因此,不能简单地说所有物品的重力是一样的。因此,题目中的陈述是错误的,正确选项是B。
39、为了让装置一边自转一边围绕旋转中心公转可以采用“行星齿轮”。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:行星齿轮是一种特殊的齿轮系统,它可以实现装置的公转和自转。在行星齿轮系统中,一个或多个行星轮围绕一个太阳轮旋转,同时行星轮也围绕自己的轴自转。这种设计使得装置能够一边自转一边围绕旋转中心公转。因此,题目中的说法是正确的。
40、齿轮传动容易出现打滑现象。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:齿轮传动是一种机械传动方式,通过齿轮之间的啮合来传递动力。打滑现象通常发生在摩擦传动中,如带传动或链传动,当传递的功率过大或速度过快时,摩擦力不足以维持传动,导致打滑。而齿轮传动由于其啮合特性,通常不会出现打滑现象。因此,题目中的说法是错误的。
41、机器人一定具备机械手臂。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:题目中的说法“机器人一定具备机械手臂”是不准确的。虽然很多机器人设计有机械手臂,但并不是所有机器人都具备机械手臂。机器人可以根据其应用和功能设计成不同的形态和构造,有些机器人可能只需要基本的传感器和执行器,而不需要机械手臂。因此,题目中的说法是错误的,正确答案为B。
42、任何机械都不省功。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:根据功的原理,使用任何机械都不省功,也就是说使用任何机械都不减少做功。这个原理是由阿基米德提出的,是经典力学中的基本定律之一。因此,选项A“正确”是正确的答案。
43、链传动只能在同一平面内连接。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:链传动是一种通过链条和链轮之间的啮合来传递动力和运动的装置。由于链条和链轮之间的啮合关系,链传动通常只能在同一平面内连接。这是因为链条和链轮之间的啮合需要满足一定的几何关系,如果链条和链轮不在同一平面内,就会导致啮合不良,影响传动效率和稳定性。因此,本题答案为A,即链传动只能在同一平面内连接。
44、“恐怖谷理论”是指机器人害怕人类。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:恐怖谷理论是指当机器人与人类在外貌、动作、表情等方面极为相似时,人们反而会对机器人产生恐惧或不适的感觉。这个理论并不是指机器人害怕人类,而是人类对高度逼真的机器人产生的一种心理反应。因此,题目中的说法是错误的。
45、皮带传动可以精确计算传动比。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:皮带传动是一种通过皮带将动力从一个轴传递到另一个轴的传动方式。然而,皮带在传动过程中会发生弹性变形,这种变形会影响皮带的实际长度,从而影响传动比。因此,皮带传动的传动比是不能精确计算的,选项B正确。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




