



一、单选题
1、我们常用到的5号电池,它的电压是?( )
A、1.5V
B、3V
C、36V
D、220V
解析:【喵呜刷题小喵解析】:我们常用的5号电池电压是1.5V。这是电池的标准电压,用于各种需要小电流供电的设备,如遥控器、手电筒等。因此,正确答案是1.5V,对应选项A。其他选项如3V、36V和220V都不是5号电池的电压。
2、以下哪种方式可以实现遥控小车左转?( )
A、左轮前进,右轮后退
B、左轮后退,右轮前进
C、左轮前进,右轮停转
D、左右轮均前进
解析:【喵呜刷题小喵解析】要实现遥控小车左转,我们需要理解车辆转向的基本原理。在一般情况下,小车通过调整左右轮的转速差来实现转向。当左轮后退而右轮前进时,车辆会向左转,因为左轮在后退时,相对右侧前进的轮子,左侧会有更大的转弯半径,从而实现左转。因此,选项B“左轮后退,右轮前进”是实现遥控小车左转的正确方式。
3、骑自行车的人遇到紧急情况刹车时,用力捏闸的目的是?( )
A、增大压力以增大摩擦
B、使接触面粗糙以增大摩擦
C、减小摩擦
D、使接触面光滑来增大摩擦
解析:【喵呜刷题小喵解析】骑自行车的人遇到紧急情况刹车时,用力捏闸的目的是增大压力以增大摩擦。当捏闸时,闸皮和车轮接触的面积会增大,从而增大了闸皮和车轮之间的摩擦力,使自行车更快地停下来,避免发生意外。因此,选项A“增大压力以增大摩擦”是正确的。选项B“使接触面粗糙以增大摩擦”和选项D“使接触面光滑来增大摩擦”都是不正确的,因为增大摩擦力并不是通过改变接触面的粗糙度来实现的,而是通过增大压力来实现的。选项C“减小摩擦”也是不正确的,因为刹车的目的就是要增大摩擦力,而不是减小摩擦力。
4、下列属于连杆机构的是?( )
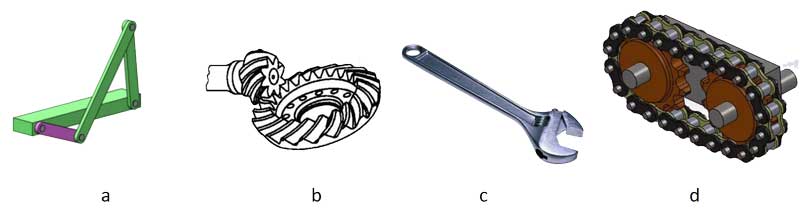
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:根据提供的图片,我们可以观察到图片中的机构由两个或多个刚性杆通过铰链连接而成,能够实现特定的运动传递或变换。这种机构属于连杆机构,因此正确选项为A。
5、下列哪个是反向双曲柄机构?( )
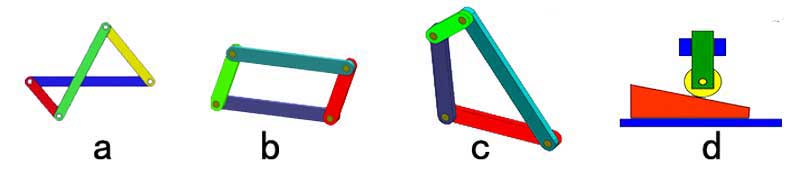
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:反向双曲柄机构是由两个平行且等长的曲柄构成的机构,其中两个曲柄的旋转方向相反。在给定的选项中,选项A的结构满足这个特点,因此是反向双曲柄机构。选项B、C、D中的结构不符合反向双曲柄机构的特点,所以正确答案是A。
6、下列哪个是内啮合棘轮机构?( )
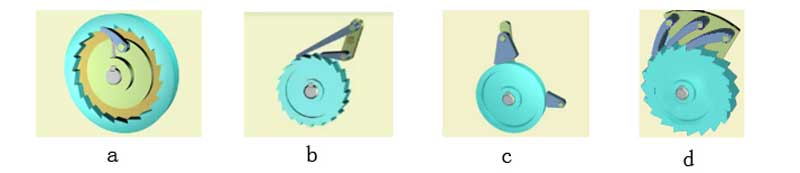
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】棘轮机构包括外啮合棘轮机构、内啮合棘轮机构和齿条棘轮机构,其特点在于,其主动件(棘轮)是连续的作间歇运动的部件。题目中的选项给出了四个图片,需要识别哪个是内啮合棘轮机构。根据棘轮机构的定义和原理,主动件(棘轮)需要与被动件(棘爪)有啮合关系,并且主动件(棘轮)需要作间歇运动。从图片中可以看到,选项A的棘轮与棘爪之间有啮合关系,并且棘轮作间歇运动,符合内啮合棘轮机构的特点。因此,正确答案是A。
7、下图为尺蠖,搭建一个机械尺蠖为了使其只能向前运动,下列选项正确的是?( )
A、一般使用凸轮机构
B、一般使用滑轮
C、一般使用棘轮机构
D、一般会使用皮带
解析:【喵呜刷题小喵解析】棘轮机构是一种只允许零件向一个方向旋转的机构,常用于实现间歇运动。尺蠖在运动时,身体各部分依次向前移动,这种运动方式适合使用棘轮机构来实现。因此,为了使机械尺蠖只能向前运动,应该使用棘轮机构。选项C正确。
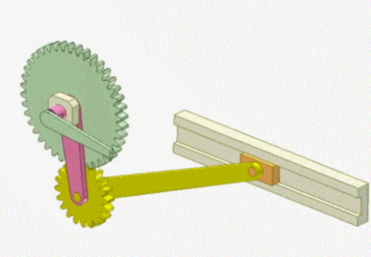
8、如图,下列机械包含了哪个机械结构?( )
A、双摇杆机构
B、曲柄滑块机构
C、曲柄摇杆机构
D、双曲柄机构
解析:【喵呜刷题小喵解析】:题目中的机械结构包含一个滑块和与之相连的曲柄,这符合曲柄滑块机构的定义。曲柄滑块机构是一种常用的机械结构,由曲柄和滑块组成,曲柄做圆周运动,滑块做直线运动。因此,答案是B,即曲柄滑块机构。
9、关于凸轮机构,下列说法错误的是?( )
A、凸轮的转速决定从动件运动的快慢
B、凸轮和从动件都有不同的形状
C、按凸轮形状不同,凸轮机构可以分为盘形凸轮、滚子凸轮和移动凸轮
D、凸轮机构可以将匀速圆周运动转化为直线往复运动
解析:【喵呜刷题小喵解析】:本题考查对凸轮机构相关知识的了解。A选项正确,凸轮的转速确实影响从动件运动的快慢,转速快则运动快,转速慢则运动慢。B选项正确,凸轮和从动件都有不同的形状,这是凸轮机构能够实现特定运动的关键。C选项错误,按从动件形状的不同,凸轮机构可以分为盘形凸轮、滚子凸轮和移动凸轮,而不是按凸轮形状的不同。D选项正确,凸轮机构确实可以将匀速圆周运动转化为直线往复运动,这是凸轮机构的基本功能之一。因此,选项C的说法是错误的。
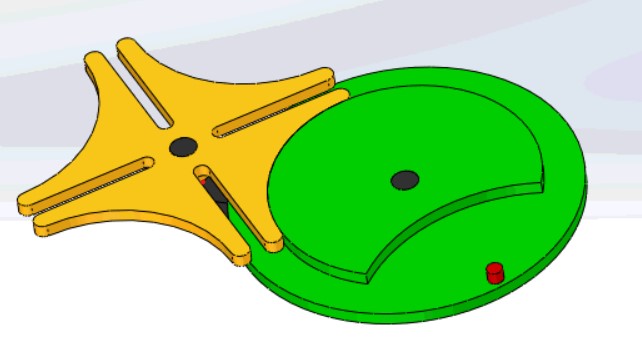
10、下图槽轮机构中的主动件是?( )
A、黄色零件
B、绿色零件
C、两者都是
D、两者都不是
解析:【喵呜刷题小喵解析】:根据槽轮机构的工作原理,主动件是指驱动槽轮机构运动的零件。观察图中的槽轮机构,我们可以看到绿色零件(通常是槽轮)在旋转,而黄色零件(通常是槽轮架)则随绿色零件的运动而运动。因此,绿色零件是主动件,黄色零件是从动件。所以,正确答案是B,即绿色零件是主动件。
11、下列选项中,不属于间歇运动机构的是?( )
A、槽轮机构
B、凸轮机构
C、棘轮机构
D、齿轮机构
解析:【喵呜刷题小喵解析】:间歇运动机构是一种能将主动件的连续运动转变为从动件有规律的间歇运动的机构。常见的间歇运动机构包括槽轮机构、凸轮机构和棘轮机构。齿轮机构是一种将旋转运动转化为直线运动或将直线运动转化为旋转运动的机构,它并不能实现间歇运动,因此齿轮机构不属于间歇运动机构。所以,选项D齿轮机构是不属于间歇运动机构的。
12、以下必须在同一平面内安装的机械零件是?( )
A、传动链
B、齿轮
C、连杆
D、滑杆
解析:【喵呜刷题小喵解析】:传动链是由一系列链节组成的,它们之间通过销轴连接,形成一条连续的链条。为了保持传动链的准确性和效率,链节之间必须保持直线排列,这要求它们必须处于同一平面内。因此,传动链必须在同一平面内安装。齿轮是机械零件,它们通过齿的啮合来传递动力,但齿轮的齿面可以是平面或曲面,不一定要求在同一平面内。连杆和滑杆也不要求在同一平面内安装,它们可以在不同的平面内运动。因此,正确答案是A,即传动链必须在同一平面内安装。
13、凸轮机构一般包括?( )
A、凸轮,主动件和机架
B、凸轮,从动件和机架
C、凸轮,主动件和从动件
D、主动件,从动件和机架
解析:【喵呜刷题小喵解析】凸轮机构是一种常见的机械机构,主要由凸轮、从动件和机架三部分组成。在凸轮机构中,凸轮是主动件,通过其轮廓推动从动件做往复运动,从而实现机械能的转换或传递。而机架则作为支撑整个机构的固定部件,为凸轮和从动件的运动提供支撑。因此,正确答案是B选项,即凸轮、从动件和机架。选项A、C、D中的主动件、从动件和机架的关系与凸轮机构的实际组成不符,因此是错误的。
14、以下不属于棘轮机构实际应用的是?( )
A、自行车飞轮
B、单向腰带扣
C、千斤顶
D、撬棍
解析:【喵呜刷题小喵解析】:棘轮机构是一种只允许机构向一个方向旋转,而在相反方向上有自锁作用的机构。A选项中的自行车飞轮、B选项中的单向腰带扣和C选项中的千斤顶都是棘轮机构的实际应用。而D选项中的撬棍并没有棘轮机构的特点,它可以在两个方向上旋转,没有自锁作用,因此不属于棘轮机构的实际应用。因此,正确答案是D选项。
15、如图,该机构为?( )

A、内啮合摩擦式棘轮机构
B、内啮合齿式棘轮机构
C、外啮合摩擦式棘轮机构
D、外啮合齿式棘轮机构
解析:【喵呜刷题小喵解析】棘轮机构是一种常用的间歇运动机构,其工作原理是依靠棘爪与棘轮上的棘齿的啮合与脱开来实现间歇运动。根据棘轮与棘爪的啮合方式,棘轮机构可分为摩擦式和齿式两类。摩擦式棘轮机构依靠棘爪与棘轮之间的摩擦力传递运动,而齿式棘轮机构则依靠棘爪与棘轮上的棘齿的啮合传递运动。根据棘轮与棘爪的相对位置,棘轮机构可分为内啮合和外啮合两类。内啮合棘轮机构中,棘轮与棘爪位于同一轴线上,而外啮合棘轮机构中,棘轮与棘爪位于不同的轴线上。根据图片信息,该棘轮机构中棘轮与棘爪位于不同的轴线上,且棘轮上的棘齿清晰可见,因此该机构应为外啮合齿式棘轮机构,答案为C。
16、带传动与链传动共同的优点是?( )
A、噪声小
B、能够保护机械
C、适合远距离传动
D、可精确地传递动力
解析:【喵呜刷题小喵解析】:带传动与链传动在机械传动中都有其特点,其中共同的优点是适合远距离传动。带传动和链传动都可以用于长距离的动力传递,这是因为它们可以通过多个轮或链节将动力从一个位置传递到另一个位置。因此,选项C“适合远距离传动”是带传动与链传动共同的优点。其他选项如噪声小、能够保护机械和可精确地传递动力并不是它们共同的优点。
17、谁提出了机器人三定律?( )
A、美国科幻家艾萨克·阿西莫夫
B、乔治·德沃尔
C、意大利作家卡洛·洛伦齐尼
D、捷克剧作家卡尔·恰佩克
解析:【喵呜刷题小喵解析】:美国科幻家艾萨克·阿西莫夫提出了机器人三定律,这是他在科幻小说《我,机器人》中提出的理论。乔治·德沃尔是工业机器人的发明者,而卡洛·洛伦齐尼和卡尔·恰佩克虽然与机器人有关,但并未提出机器人三定律。因此,正确答案是A。
18、第二代机器人是?( )
A、示教再现型机器人
B、感知型机器人
C、智能机器人
D、仿真机器人
解析:【喵呜刷题小喵解析】:第二代机器人是感知型机器人,它能够通过传感器和控制器感知周围环境,并根据感知结果做出相应的反应。相比于第一代示教再现型机器人,感知型机器人具有更高的自主性和智能化程度,能够更好地适应复杂多变的工作环境。因此,正确答案是感知型机器人。
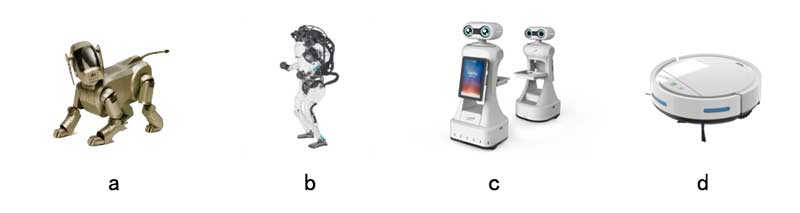
19、下列可以清洁地面的机器人是?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】题目中给出的图片应该是一个机器人的图像,需要识别并判断这个机器人是哪一个可以清洁地面的选项。由于题目中没有提供具体图片,因此无法直接判断。但是,根据题目给出的选项,我们可以推测这是一个单选题,需要从给定的选项中选择一个正确答案。在常见的清洁地面机器人中,选项D可能是一个合理的答案。然而,由于无法看到具体的机器人图像,我们不能确定选项D是否正确。因此,最终的答案需要根据题目中给出的具体机器人图像和选项来判断。在没有具体图像和选项的情况下,我们只能根据常识和逻辑推理来猜测正确答案。由于题目没有给出更多信息,因此无法给出更准确的解析。如果需要更准确的答案和解析,需要提供更多的信息和背景。
20、如果只能安装主动轮和从动轮两个轮,下列哪个传动方式不适合远距离传递动力?( )
A、齿轮传动
B、链条传动
C、皮带平行传动
D、皮带交叉传动
解析:【喵呜刷题小喵解析】齿轮传动适用于近距离传递动力,因为齿轮之间需要直接接触,如果距离过远,会导致齿轮之间的磨损和能量损失增加。而链条传动、皮带平行传动和皮带交叉传动都可以适用于远距离传递动力,因为它们都是通过中间件(链条或皮带)来传递动力,中间件可以在一定范围内伸缩,从而适应不同距离的动力传递。因此,齿轮传动不适合远距离传递动力。
21、齿轮传动、链传动、皮带传动三种传动方式中,主动轮和从动轮转向不同的是?( )
A、齿轮平行啮合、皮带平行传动
B、齿轮平行啮合、皮带交叉传动
C、链传动、皮带平行传动
D、链传动、皮带交叉传动
解析:【喵呜刷题小喵解析】齿轮传动中,主动轮和从动轮的转向是相同的,因为齿轮是平行啮合的。皮带传动中,主动轮和从动轮的转向也是相同的,因为皮带是平行传动的。而在链传动中,主动轮和从动轮的转向是不同的,因为链条是围绕两个齿轮进行传动的,所以主动轮和从动轮的转向是相反的。因此,正确答案是B,即齿轮平行啮合、皮带平行传动。
22、关于棘轮机构,说法错误的是?( )
A、摩擦式棘轮机构动程可以无级调节
B、棘轮机构一定有主动棘爪和止回棘爪两个棘爪
C、外啮合棘轮机构比内啮合棘轮机构更容易维修安装
D、齿式棘轮机构动程只能有级调节
解析:【喵呜刷题小喵解析】:棘轮机构中,棘爪的数量并不是固定的,可以有多个棘爪,但并非一定需要主动棘爪和止回棘爪两个棘爪。因此,选项B的说法是错误的。其他选项中的说法都是正确的,摩擦式棘轮机构动程可以无级调节,外啮合棘轮机构比内啮合棘轮机构更容易维修安装,齿式棘轮机构动程只能有级调节。
23、家用自行车主要采用的传动方式是?( )
A、链传动
B、皮带传动
C、齿轮传动
D、无法确定
解析:【喵呜刷题小喵解析】:家用自行车主要采用的传动方式是链传动。链传动是一种通过链条将动力从主动链轮传递到从动链轮的传动方式,适用于近距离、两轴平行且回转速度变化较大的场合。在家用自行车中,链条连接着踏板上的主动齿轮和车轮上的从动齿轮,通过脚踏板的动力输入,使链条带动齿轮转动,从而驱动车轮前进。因此,家用自行车主要采用的传动方式是链传动。选项B皮带传动常见于汽车发动机等场合,选项C齿轮传动虽然也存在于自行车中,但主要用于变速系统,不是主要的传动方式。选项D无法确定是不正确的,因为家用自行车的主要传动方式是可以确定的。
24、发电机的能量转化方式是?( )
A、机械能转化为电能
B、核能转化为化学能
C、化学能转化为电能
D、热能转化为电能
解析:【喵呜刷题小喵解析】发电机的能量转化方式是将机械能转化为电能。发电机通过旋转的转子产生磁场,与定子中的线圈相互作用,从而产生电动势,将机械能转化为电能。因此,正确答案是nA 机械能转化为电能。
25、如果在水平的沙地上、水泥路上、光滑的木板上和玻璃上分别给一个物体相同的初速度,物体会在哪种平面上滑行得更远?( )
A、沙地上
B、水泥路上
C、光滑的木板上
D、玻璃上
解析:【喵呜刷题小喵解析】光滑程度越高的表面,摩擦力越小,物体受到的阻力就越小,滑行得越远。玻璃表面光滑,摩擦力最小,因此物体在玻璃上滑行得更远。沙地、水泥路和木板表面相对粗糙,摩擦力较大,物体滑行的距离会相应缩短。因此,正确答案是玻璃上。
26、当物体与地面之间产生了滑动摩擦力,以下哪个因素会影响摩擦力大小?( )
A、物体体积大小
B、物体的颜色
C、物体高度
D、接触面的粗糙程度
解析:【喵呜刷题小喵解析】滑动摩擦力的大小与接触面的粗糙程度有关,而与物体的体积大小、颜色、高度等因素无关。因此,当物体与地面之间产生了滑动摩擦力时,接触面的粗糙程度会影响摩擦力的大小。所以,正确答案是D选项,即接触面的粗糙程度。
27、一台静止在斜面上的汽车,轮胎与地面会?( )
A、不产生摩擦力
B、有静摩擦力
C、有滚动摩擦力
D、有滑动摩擦力
解析:【喵呜刷题小喵解析】:汽车在斜面上,虽然轮胎没有发生滑动,但由于轮胎与地面之间有相对运动的趋势,所以会产生静摩擦力。静摩擦力是一种阻碍物体相对运动的力,它的大小与物体间相对运动的趋势成正比。因此,选项B“有静摩擦力”是正确的。选项A“不产生摩擦力”是不正确的,选项C“有滚动摩擦力”和选项D“有滑动摩擦力”都是不准确的。
28、我国铁路大提速后,站台上的乘客与列车间的空气流速和压强也发生了变化,为了有效地防止安全事故的发生,站台的安全线距离由原来的1m变为2m。关于列车与乘客间空气流速及压强的变化,判断正确的是?( )
A、空气流速变大,压强变小
B、空气流速变大,压强变大
C、空气流速变小,压强变大
D、空气流速变小,压强变小
解析:【喵呜刷题小喵解析】本题主要考查流体压强与流速的关系:流速越大的位置压强越小。列车驶进站台时,会带动人和车之间的空气流动速度加快,根据流体压强与流速的关系可知:人外侧受到的压强大于内侧受到的压强,人在内外压强差的作用下,会被压向列车出现危险。为了有效地防止安全事故的发生,站台的安全线距离由原来的1m变为2m,即增大了人与列车之间的安全距离,防止人被吸入列车。故空气流速变大,压强变小。
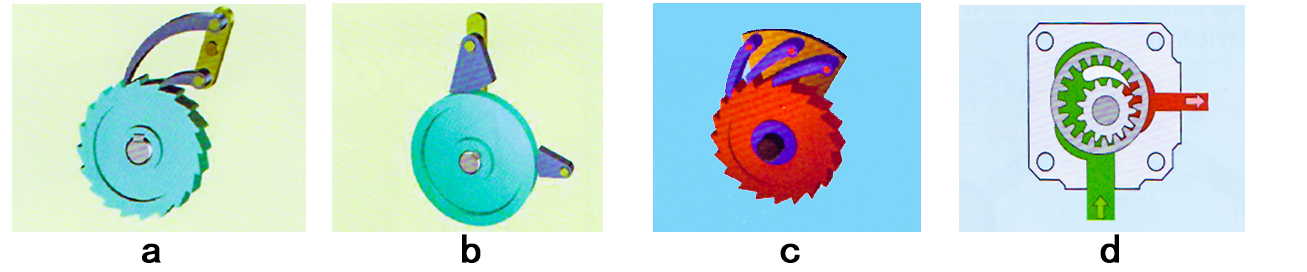
29、下列哪个棘轮机构具有传动平稳的特点?( )
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】棘轮机构通常由棘轮和棘爪组成,棘轮上分布有棘齿,棘爪可以推动棘轮转动。棘轮机构具有单向间歇运动的特点,棘爪推动棘轮转动一定的角度后,棘爪会被棘轮上的棘齿卡住,棘轮停止转动,直到棘爪再次与棘轮上的下一个棘齿接触,棘轮才会继续转动。棘轮机构中,棘轮和棘爪之间的接触面积较小,且棘轮上棘齿的分布较为稀疏,因此棘轮机构在传动过程中会产生较大的冲击和噪声,传动平稳性较差。然而,在棘轮机构中,有一种棘轮称为“静音棘轮”,其棘齿分布较为密集,棘爪与棘齿之间的接触面积较大,使得传动过程中的冲击和噪声减小,传动平稳性较好。因此,选项B中的棘轮机构具有传动平稳的特点。
30、下列凸轮机构的分类方式与其他三个不同的是?( )
A、尖顶从动件凸轮机构
B、滚子从动件凸轮机构
C、平底从动件凸轮机构
D、摆动从动件凸轮机构
解析:【喵呜刷题小喵解析】:本题考查的是凸轮机构的分类方式。A选项“尖顶从动件凸轮机构”是以从动件端部形状进行分类的,从动件为尖顶。B选项“滚子从动件凸轮机构”是以从动件端部形状进行分类的,从动件为滚子。C选项“平底从动件凸轮机构”是以从动件端部形状进行分类的,从动件为平底。D选项“摆动从动件凸轮机构”是以从动件的运动形式进行分类的,从动件做摆动。从上述分析可以看出,A、B、C选项都是以从动件端部形状进行分类的,而D选项是以从动件的运动形式进行分类的。因此,D选项的分类方式与其他三个不同。所以,正确答案是D选项。
二、多选题
31、下列选项中属于棘轮机构分类的是?( )
A、摆动式从动件棘轮
B、摩擦式棘轮
C、内啮合式棘轮
D、重力式棘轮
解析:【喵呜刷题小喵解析】:棘轮机构是一种常用的间歇运动机构,其主动件做连续的圆周运动,而从动件做间歇的步进运动。棘轮机构通常包括棘轮和棘爪两部分。棘轮上沿圆周均匀分布若干个棘齿,棘爪装在摇杆上,棘爪靠弹簧的弹力或重力与棘轮上的棘齿啮合或脱离。棘轮机构按照从动件的运动形式可以分为摆动式从动件棘轮机构、摩擦式棘轮机构和重力式棘轮机构等。选项nA摆动式从动件棘轮机构中,从动件做摆动运动,棘轮每转过一个棘齿,从动件完成一次摆动,棘轮和棘爪啮合时,棘轮停止转动,棘爪脱离棘齿时,棘轮继续转动,因此这种机构适合用作间歇运动。选项nB摩擦式棘轮机构中,棘爪与棘轮之间靠摩擦力传递运动,当主动件带动棘轮转动时,棘爪靠摩擦力带动棘轮上的棘齿转动,从而实现间歇运动。选项nC内啮合式棘轮机构中,棘轮和棘爪在内部啮合,当主动件带动棘轮转动时,棘爪在内部与棘轮上的棘齿啮合,从而实现间歇运动。选项nD重力式棘轮机构并不是棘轮机构的分类,棘轮机构主要是按照从动件的运动形式进行分类的,而不是按照驱动方式。因此,选项nA摆动式从动件棘轮和选项nB摩擦式棘轮属于棘轮机构的分类,而选项nC内啮合式棘轮也是棘轮机构的一种形式,但题目中未明确提及,因此不选。选项nD重力式棘轮不是棘轮机构的分类。所以,正确答案是BC。
32、如图,飞机起飞时,下列说法正确的是?( )
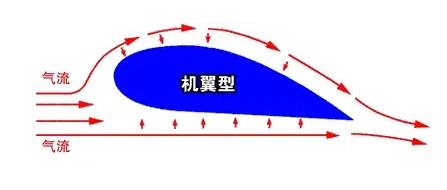
A、机翼上侧气流速度快
B、机翼下侧气流速度快
C、机翼上侧气压低
D、机翼下侧气压低
解析:【喵呜刷题小喵解析】机翼的形状是向上凸起的,导致空气在机翼上方流动时,流动的路程更长,流速更快;而机翼下方空气流动的路程短,流速慢。根据伯努利原理,流速快的地方压强小,流速慢的地方压强大。因此,机翼上侧气流速度快,气压低;机翼下侧气流速度慢,气压高。所以,选项A“机翼上侧气流速度快”和选项C“机翼上侧气压低”是正确的。选项B“机翼下侧气流速度快”和选项D“机翼下侧气压低”都是错误的。
33、如图是双曲柄机构,也是平面四杆机构,该机构的优点有?( )
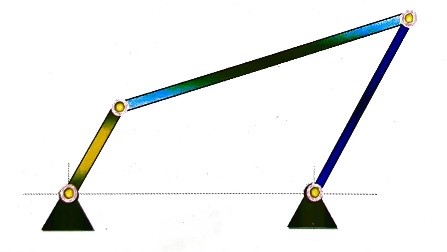
A、低副接触压强小,耐磨损
B、设计简单,可以精确实现复杂的运动规律
C、易于加工,几何形状能保证本身封闭
D、制造简便,易于获得较高的制造精度
解析:【喵呜刷题小喵解析】:双曲柄机构是一种平面四杆机构,具有以下优点:A. 低副接触压强小,耐磨损:双曲柄机构中的低副是指两杆通过铰链连接,由于接触面积较小,压强较大,容易导致磨损。但在双曲柄机构中,由于曲柄的摆动和转动,使得两杆之间的接触面积不断变化,从而减小了压强,使得机构更加耐磨损。C. 易于加工,几何形状能保证本身封闭:双曲柄机构中的杆件形状较为简单,易于加工。同时,由于曲柄的摆动和转动,机构本身就是一个封闭的机构,无需外界输入能量就可以维持运动。D. 制造简便,易于获得较高的制造精度:双曲柄机构中的杆件形状简单,制造较为简便,同时也易于获得较高的制造精度。这有助于提高机构的性能和寿命。而选项B“设计简单,可以精确实现复杂的运动规律”虽然是一个优点,但并不能专门归因为双曲柄机构的优点,因为其他类型的平面四杆机构也可以实现复杂的运动规律。因此,选项B不是双曲柄机构的优点。
34、皮带传动的优点有哪些?( )
A、能准确无误地传递动力
B、传动力大
C、能保护机械
D、可在皮带的弹性范围内远距离传递动力
解析:【喵呜刷题小喵解析】:皮带传动是一种常见的动力传递方式,其优点包括传动力大和可在皮带的弹性范围内远距离传递动力。皮带传动可以通过改变皮带的长度和张力来实现动力的传递,因此可以在一定范围内实现远距离的动力传递。同时,皮带传动也具有一定的传动力,可以传递较大的动力。因此,选项C和D是正确的。选项A“准确无误地传递动力”并不是皮带传动的特点,因为皮带传动会有一定的打滑现象,无法做到完全准确的动力传递。选项B“能保护机械”也不是皮带传动的特点,皮带传动并不能起到保护机械的作用。
35、以下传动方式可以准确无误地传递动力的是?( )
A、齿轮传动
B、链传动
C、皮带传动
D、无法确定
解析:【喵呜刷题小喵解析】齿轮传动和链传动都可以准确无误地传递动力。齿轮传动通过齿轮之间的啮合来实现动力的传递,具有传动比稳定、传动效率高、寿命长等优点。链传动则是通过链条和链轮之间的啮合来实现动力的传递,适用于两轴中心距较大的场合。皮带传动虽然也可以传递动力,但其准确性不如齿轮传动和链传动,因为皮带在传递过程中可能会打滑。因此,齿轮传动和链传动是可以准确无误地传递动力的传动方式,答案为A、B。
三、判断题
36、我们生活中的汽车基本分为前轮驱动、后轮驱动和四轮驱动。相对来说前轮驱动的零部件少,成本低。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:题目中提到了前轮驱动、后轮驱动和四轮驱动。相对于后轮驱动和四轮驱动,前轮驱动的汽车在结构上更为简单,所需的零部件数量较少。这种简化的结构可以减少生产成本。因此,前轮驱动相对于后轮驱动和四轮驱动来说,零部件少,成本低。所以,题目中的陈述是正确的。
37、行驶过程中轮子与地面产生的是静摩擦力。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:行驶过程中,轮子与地面之间产生的摩擦力是动摩擦力,而非静摩擦力。静摩擦力发生在两个物体之间相对静止,但有相对运动趋势时。而行驶过程中,轮子与地面之间既有相对运动,也有相对运动趋势,因此产生的是动摩擦力。所以,题目的说法是错误的。
38、凸轮从动件的运动轨迹由凸轮的轮廓曲线决定。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:凸轮从动件的运动轨迹是由凸轮的轮廓曲线决定的。当从动件与凸轮的轮廓曲线接触时,从动件会沿着凸轮的轮廓曲线运动,从而形成一个特定的运动轨迹。因此,凸轮的轮廓曲线决定了从动件的运动轨迹,所以答案是正确的。
39、脚踏缝纫机中,踏板连接部分所使用的传动机构是棘轮机构。
A 正确
B 错误
解析:【喵呜刷题小u解析】:在脚踏缝纫机中,踏板连接部分所使用的传动机构是曲柄摇杆机构,而非棘轮机构。棘轮机构常用于防止机构反转,而在脚踏缝纫机中,曲柄摇杆机构是实现踏板上下运动并驱动缝纫机头工作的关键机构。因此,题目中的说法是不正确的。
40、摩擦式棘轮机构靠摩擦力传动,适用的场合是低速重载场合。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:摩擦式棘轮机构是通过摩擦力来传递运动的,但并不意味着它只适用于低速重载场合。实际上,摩擦式棘轮机构可以在各种速度和负载条件下使用,只要摩擦系数足够大,能够传递所需的扭矩。因此,说摩擦式棘轮机构只适用于低速重载场合是不准确的,所以答案是B,即错误。
41、链传动可根据轮的直径大小计算传动比。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:链传动是一种通过链条在链轮上传递运动和动力的方式。链轮的大小,即直径,决定了链条在链轮上的节距和速度。因此,可以通过链轮的直径大小来计算传动比。所以,题目中的说法是正确的。
42、“木牛流马”是由蜀汉丞相诸葛亮发明的,用来运送军需物资。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:根据历史记载,“木牛流马”是由蜀汉丞相诸葛亮发明的,用于运送军需物资。因此,题目中的陈述是正确的。
43、机器人一定具备生物能。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:生物能通常指的是由生物体(如植物、动物等)产生的能量,而机器人是一种能够自动执行任务的机器或设备,它们通常使用电能、机械能等作为其动力来源,而不是生物能。因此,机器人不一定具备生物能,该题目说法错误。
44、“行星齿轮”自身的转动称为自转,围绕恒星的转动称为公转。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:行星齿轮的转动分为自转和公转。自转是指行星齿轮自身的转动,而公转是指行星齿轮围绕恒星的转动。因此,题目中的描述是正确的。
45、物体受到摩擦力的方向和物体的运动方向一定相同。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:摩擦力的方向不一定与物体的运动方向相同。摩擦力分为静摩擦力和滑动摩擦力。对于静摩擦力,其方向总是与相对运动趋势的方向相反,并不一定与物体的运动方向相同。对于滑动摩擦力,其方向总是与相对运动的方向相反,这也可能与物体的实际运动方向不同。因此,该题目中的说法是不正确的。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




