



一、单选题
1、同一斜面上,两个物体同时下滑,下列正确的是?
A、重量大的物体向下的压力大
B、重量小的物体向下的压力大
C、重量小的物体不受摩擦力作用
D、斜面越粗糙,两物体所受的摩擦力越小
解析:【喵呜刷题小喵解析】在斜面上,两个物体同时下滑,其下滑的力主要来自于重力沿斜面向下的分力,而不是物体本身对斜面的压力。因此,选项A“重量大的物体向下的压力大”是不正确的。对于选项B“重量小的物体向下的压力大”,同样,压力的大小与物体的重量无关,因此也是错误的。选项C“重量小的物体不受摩擦力作用”也是不正确的,因为在斜面上,任何物体都会受到摩擦力的作用,不论其重量大小。最后,选项D“斜面越粗糙,两物体所受的摩擦力越小”也是错误的。根据摩擦力的定义,当斜面变得粗糙时,物体与斜面之间的摩擦力会增大,而不是减小。因此,正确答案是A,但这个选项本身也是错误的,可能是题目或选项表述有误。在实际情况中,两个物体在同一斜面上下滑时,其下滑的力主要来自于重力沿斜面向下的分力,与物体的重量和斜面的粗糙程度都有关,但题目中的选项表述存在误导。
2、以下关于重力的说法正确的是?
A、小的物体不受重力作用
B、重力的方向竖直向上
C、重力的作用点是物体的重心
D、把同一块橡皮泥捏成不同形状,重力的大小也会不同
解析:【喵呜刷题小喵解析】A选项:小的物体不受重力作用。这是错误的。所有物体,无论大小,都会受到重力的作用。B选项:重力的方向竖直向上。这也是错误的。重力的方向是竖直向下的。C选项:重力的作用点是物体的重心。这是正确的。重心是物体受到重力的等效作用点。D选项:把同一块橡皮泥捏成不同形状,重力的大小也会不同。这是错误的。虽然形状可以改变,但物体的质量不会改变,因此重力的大小也不会改变。因此,正确答案是C选项。
3、电动机是将( )能转化为( )能的装置?( )
A、电,机械
B、热,电
C、电,热
D、化学,电
解析:【喵呜刷题小喵解析】:电动机是一种将电能转化为机械能的装置。在电动机中,电流通过线圈产生磁场,与永磁体或另一个磁场相互作用,从而产生旋转力,使电动机的转子转动,进而将电能转化为机械能。因此,正确答案是“电,机械”。
4、如图这是滑杆机构,滑块B做什么动作?

A、回转动作
B、在轨道上滑动
C、上下摆动
D、固定不动
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到滑块B位于滑杆机构上,并且滑杆机构有一个轨道。因此,滑块B在轨道上滑动,选项B“在轨道上滑动”是正确的。其他选项如“回转动作”、“上下摆动”和“固定不动”都不符合图片中的实际情况。
5、如果物体静止在斜面上,则该物体受到的力不包括?
A、自身的重力
B、斜面的支持力
C、摩擦力
D、弹力
解析:【喵呜刷题小喵解析】:物体静止在斜面上时,它受到的重力、斜面的支持力和摩擦力都是必要的力。重力使物体有向下滑动的趋势,而斜面的支持力和摩擦力则用来平衡这种趋势,使物体保持静止。弹力通常指的是两个物体接触时产生的力,但在本题中,物体与斜面接触产生的力已经被归类为斜面的支持力,因此不需要再单独考虑弹力。所以,物体受到的力不包括弹力。
6、当前正在研究的智能机器人属于第几代机器人?
A、第一代
B、第二代
C、第三代
D、第四代
解析:【喵呜刷题小喵解析】:目前,智能机器人技术已经经历了多个发展阶段。第一代机器人主要基于简单的预设程序进行重复性工作,第二代机器人则开始具备了一定的感知和反应能力,能够处理一些较为复杂的任务。而第三代机器人则更加注重智能化和自主性,它们能够学习和适应环境,具备更高的智能水平。因此,当前正在研究的智能机器人很可能属于第三代机器人。
7、我国家庭用电器的标准电压是多少伏?
A、110V
B、220V
C、12V
D、36V
解析:【喵呜刷题小喵解析】:家庭用电器的标准电压通常是家庭电路的标准电压,我国家庭电路的电压为220V,所以答案选项为B。其他选项中的电压值不符合家庭用电器的标准电压,因此可以排除。
8、机器人三原则”是由____提出的?
A、卡尔.恰佩克
B、阿西莫夫
C、雨果
D、列夫.托尔斯泰
解析:【喵呜刷题小喵解析】:“机器人三原则”是由阿西莫夫提出的。这是科幻小说作家阿西莫夫在他的科幻小说中提出的,旨在规范机器人行为的原则。卡尔·恰佩克是科幻小说的先驱,但“机器人三原则”是阿西莫夫的贡献。因此,正确答案是B选项,即阿西莫夫。
9、凸轮机构的从动件类型不包括?
A、尖顶从动件
B、滚子从动件
C、圆顶从动件
D、平底从动件
解析:【喵呜刷题小喵解析】:在凸轮机构中,从动件的类型通常包括尖顶从动件、滚子从动件和平底从动件。圆顶从动件并不属于常见的凸轮机构从动件类型。因此,选项C“圆顶从动件”是不包括在凸轮机构的从动件类型中的。
10、下图是什么机械机构?
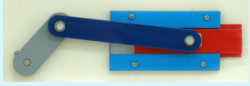
A、曲柄滑块机构
B、曲柄摇杆机构
C、双曲柄机构
D、双摇杆机构
解析:【喵呜刷题小喵解析】:根据提供的图片,我们可以看到一个曲柄滑块机构。曲柄滑块机构是由一个曲柄和一个滑块组成,曲柄做圆周运动,滑块则沿着一条直线做往复运动。因此,正确答案是A,即曲柄滑块机构。
11、下列选项中,没有用到连杆机构的是?

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:在提供的图片中,我们可以看到四个选项中的机械装置。A选项中的装置包含一个连杆机构,其中有一个或多个连杆将两个或多个旋转部件连接起来。B选项中的装置是一个简单的齿轮装置,它使用齿轮来传递动力和改变运动方向,而不是连杆机构。C选项中的装置也包含一个连杆机构,通过连杆连接旋转部件。D选项中的装置同样包含一个连杆机构。因此,没有用到连杆机构的是B选项。
12、一辆八轮装甲车,左侧四个轮子转速是200rpm,右侧四个轮子转速是100rpm,则此装甲车?
A、向前直走
B、向左前方转向
C、向右前方转向
D、原地不动
解析:【喵呜刷题小喵解析】:装甲车左侧四个轮子转速是200rpm,右侧四个轮子转速是100rpm,转速不同,因此装甲车会向右前方转向。所以正确答案是C。
13、以下对凸轮机构中从动件运动轨迹和规律没有影响的是?
A、凸轮的颜色
B、凸轮转动的快慢
C、凸轮的轮廓曲线
D、从动件的运动方式
解析:【喵呜刷题小喵解析】:在凸轮机构中,从动件的运动轨迹和规律主要取决于凸轮的轮廓曲线。凸轮的轮廓曲线决定了从动件的运动轨迹,而凸轮的转动快慢(即角速度)决定了从动件的运动速度。至于凸轮的颜色,它并不会对从动件的运动轨迹和规律产生任何影响。因此,正确答案是A选项,即“凸轮的颜色”。
14、以下机构中,安装方向必须在同一平面内的是?
A、啮合的齿轮
B、传动链和链轮
C、皮带和带轮
D、蜗轮蜗杆
解析:【喵呜刷题小喵解析】齿轮、蜗轮蜗杆和皮带和带轮在安装时,其方向可以在不同的平面内,只要保证它们之间的相对位置关系正确即可。然而,传动链和链轮在安装时,链轮和链条必须位于同一平面内,以保证传动的准确性和效率。因此,安装方向必须在同一平面内的是传动链和链轮,所以答案为B。
15、按照凸轮的形状对凸轮机构分类,不包括下列哪一项?
A、盘形凸轮
B、滚子凸轮
C、圆柱凸轮
D、移动凸轮
解析:【喵呜刷题小喵解析】:在凸轮机构中,凸轮的形状决定了其分类。常见的凸轮形状包括盘形凸轮、滚子凸轮和圆柱凸轮。然而,选项D“移动凸轮”并不是按照凸轮的形状对凸轮机构进行的分类。因此,正确答案是不包括“移动凸轮”。
16、滑杆机构中回转体做什么运动?
A、左右摆动
B、上下滑动
C、回转运动
D、左右滑动
解析:【喵呜刷题小喵解析】:在滑杆机构中,回转体绕轴进行圆周运动,也就是回转运动。所以,选项C“回转运动”是正确答案。选项A左右摆动,选项B上下滑动,选项D左右滑动,都不是回转体在滑杆机构中的运动方式。
17、“木牛流马”是谁发明的?
A、苏颂
B、诸葛亮
C、张衡
D、鲁班
解析:【喵呜刷题小喵解析】:根据历史记载,“木牛流马”是三国时期蜀汉丞相诸葛亮发明的。它是一种用于山地运输的器具,分为木牛和流马两部分,具有载重、省力的特点。因此,正确答案是“诸葛亮”。其他选项中,苏颂、张衡和鲁班都没有与“木牛流马”相关的历史记载。
18、自行车主要应用了哪种机构传动?
A、棘轮
B、传动链
C、皮带
D、槽凸轮
解析:【喵呜刷题小喵解析】:自行车主要应用了传动链机构进行传动。传动链是自行车中最重要的传动部件之一,它将踏板上产生的动力传递给车轮,使自行车得以行驶。棘轮、皮带和槽凸轮虽然也在一些机械装置中有所应用,但在自行车中并不是主要的传动机构。因此,正确答案为B,即传动链。
19、以下选项中不属于皮带传动连接方式的是?
A、平行传动
B、交叉传动
C、半交叉传动
D、平行啮合
解析:【喵呜刷题小喵解析】:皮带传动主要有平行传动、交叉传动和半交叉传动三种方式。平行传动是指皮带的运行方向与驱动轮和从动轮的轴线平行;交叉传动是指皮带的运行方向与驱动轮和从动轮的轴线成一定角度;半交叉传动则是介于两者之间的一种形式。而平行啮合并不是皮带传动的连接方式,它通常指的是齿轮传动中,两个齿轮的轮齿沿着它们的轴线平行排列,使它们能够相互咬合传递动力。因此,选项D“平行啮合”不属于皮带传动的连接方式。
20、伯努利定理是指物体表面流体流速越快那么物体所受的压强越小,该原理可以解释下列哪个现象
A、向靠近的且相互平行的两张纸中间吹气,两张纸往里合
B、吹风扇时人会感到凉爽
C、冬天在屋里向玻璃上哈气会在玻璃上形成小水滴
D、对一个物体施力,可能会改变物体的运动轨迹
解析:【喵呜刷题小喵解析】伯努利定理指出,物体表面流体流速越快,物体所受的压强越小。对于选项A,向靠近的且相互平行的两张纸中间吹气,由于吹气使得两张纸中间的空气流速加快,根据伯努利定理,两张纸中间的压强会减小,从而使得两张纸往里合。这与伯努利定理的原理相符合。选项B描述的是吹风扇时人会感到凉爽,这主要是由于风扇吹出的风带走了一部分热量,使人感觉凉爽,与伯努利定理没有直接关系。选项C描述的是冬天在屋里向玻璃上哈气会在玻璃上形成小水滴,这是由于哈出的水蒸气遇到冷的玻璃表面液化形成的小水滴,与伯努利定理无关。选项D描述的是对一个物体施力,可能会改变物体的运动轨迹,这是力的作用效果之一,与伯努利定理也没有关系。因此,正确答案是A。
21、以下选项中,最适合机器人行走的机构是?
A、连杆机构
B、齿轮机构
C、棘轮机构
D、凸轮机构
解析:【喵呜刷题小喵解析】:连杆机构是一种通过一系列杆件连接而成的机构,可以实现复杂的运动轨迹。在机器人行走中,连杆机构可以模拟人类的步态,实现稳定的行走。齿轮机构主要用于传递动力和改变运动方向,棘轮机构常用于单向锁定或单向运动,而凸轮机构则常用于实现往复运动。因此,连杆机构是最适合机器人行走的机构。
22、以下选项中对前轮驱动和后轮驱动说法正确的是?
A、前轮驱动车前轮是主动轮
B、前轮驱动车后轮是主动轮
C、前轮驱动车前轮承担转向和驱动功能,转向会过度
D、后轮驱动起步加速表现较差
解析:【喵呜刷题小喵解析】:前轮驱动车的前轮是主动轮,后轮是从动轮。前轮驱动车的发动机一般安装在车辆的前部,通过传动系统将动力传递给前轮,使车辆前进。因此,前轮驱动车前轮是主动轮,后轮是从动轮,所以选项A是正确的。选项B错误,因为前轮驱动车后轮不是主动轮。选项C说前轮驱动车前轮承担转向和驱动功能,转向会过度,虽然部分情况下可能出现这种情况,但不能说所有前轮驱动车都会这样,因此选项C也不完全正确。选项D说后轮驱动起步加速表现较差,这是不准确的,后轮驱动车通常具有较好的起步加速性能,因此选项D也是错误的。
23、如图下列哪项不属于该棘轮机构?

A、主动摆杆
B、棘轮
C、主动棘爪
D、止回棘爪
解析:【喵呜刷题小喵解析】:棘轮机构通常由主动摆杆、棘轮和棘爪组成。其中,棘爪可以是主动棘爪或止回棘爪。主动棘爪通常由主动摆杆驱动,用于推动棘轮转动;止回棘爪则用于防止棘轮反向转动。因此,止回棘爪不是棘轮机构的基本组成部分,而是用于增强机构性能或满足特定需求的附加部件。所以,选项D止回棘爪不属于该棘轮机构。
24、组成凸轮机构的构件不包括?
A、凸轮
B、从动件
C、机架
D、滑块
解析:【喵呜刷题小喵解析】:凸轮机构由三部分组成:凸轮、从动件和机架。其中,凸轮是控制从动件运动的主动件,从动件是随凸轮的运动而运动的被动件,机架是固定不动的支撑件。滑块并不是凸轮机构的构件,因此选项D“滑块”是不包括在凸轮机构中的构件。
25、以下哪个不是棘轮机构?
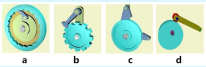
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】棘轮机构通常由棘轮、棘爪和摇杆组成。棘轮上有若干个棘齿,棘爪则用于控制棘轮的转动方向。棘轮机构的特点是,棘爪只允许棘轮朝一个方向转动,而在另一个方向上则受到阻止。从给出的选项来看,D选项的结构与棘轮机构的特点不符,因此不是棘轮机构。因此,正确答案是D。
26、以下不能精确传递动力的是?
A、齿轮平行啮合
B、齿轮垂直啮合
C、皮带传动
D、链传动
解析:【喵呜刷题小喵解析】齿轮平行啮合、齿轮垂直啮合、链传动都可以精确传递动力,而皮带传动由于存在弹性变形,不能精确传递动力,所以选C。
27、下列关于传动方式说法正确的是?
A、齿轮传动精度比皮带传动高
B、齿轮传动的传动比无法计算
C、链传动的传动比无法计算
D、齿轮传动比皮带传动更适合远距离传递动力
解析:【喵呜刷题小喵解析】:齿轮传动的精度通常比皮带传动高,因为齿轮的齿面接触面积小,接触压力大,传动更加精确。因此,选项A正确。齿轮传动的传动比可以通过齿轮的齿数比来计算,所以选项B错误。链传动的传动比也可以通过链轮的齿数比来计算,因此选项C错误。虽然齿轮传动在近距离传递动力时具有较高的效率,但在远距离传递动力时,皮带传动可能更为合适,因为皮带传动可以通过张紧装置调整皮带的张紧力,从而适应不同的传动距离和负载变化。因此,选项D错误。
28、关于平面连杆机构说法正确的是?
A、连杆机构中杆越多,动作越精确
B、杆的连接处属于点和面的接触,是高副机构
C、制造精度较高,制造相对简单
D、易于实现复杂的运动规律
解析:【喵呜刷题小喵解析】在平面连杆机构中,杆的数量并不是决定动作精确性的唯一因素。动作精确性受到连杆机构的设计、制造精度、材料等多种因素的影响。因此,选项A“连杆机构中杆越多,动作越精确”是不正确的。杆的连接处通常是两个杆通过铰链连接,属于点和点的接触,而不是点和面的接触。因此,选项B“杆的连接处属于点和面的接触,是高副机构”也是不正确的。平面连杆机构的制造精度对其性能有很大影响。制造精度较高时,连杆机构可以更加准确地传递运动和力,但制造相对复杂。因此,选项C“制造精度较高,制造相对简单”是不完全正确的,应该是制造精度较高,但制造相对复杂。平面连杆机构可以实现多种复杂的运动规律,但并不是所有连杆机构都易于实现复杂的运动规律。因此,选项D“易于实现复杂的运动规律”是不完全正确的。综上所述,选项C“制造精度较高,制造相对复杂”虽然表述不完全准确,但在四个选项中相对较为接近正确。因此,正确答案是C。
29、以下哪个不属于棘轮机构的分类?
A、外啮合棘轮机构
B、内啮合棘轮机构
C、齿式棘轮机构
D、盘形凸轮
解析:【喵呜刷题小喵解析】:棘轮机构是一种常用的间歇运动机构,主要由主动摆杆、棘爪、棘轮和机架组成。棘轮机构根据其棘轮和棘爪的啮合方式,可以分为外啮合棘轮机构和内啮合棘轮机构。齿式棘轮机构则是棘轮机构的一种特定形式,其棘轮上的棘齿与棘爪的啮合方式与普通棘轮机构类似。而盘形凸轮是一种凸轮机构,与棘轮机构属于不同的机构类型。因此,选项D“盘形凸轮”不属于棘轮机构的分类。
30、以下各项中,不属于皮带传动特点的是?
A、可以应用于传送带
B、能保护机械
C、适合远距离传递动力
D、动力传递精准
解析:【喵呜刷题小喵解析】:皮带传动是一种通过皮带将动力从一个轴传递到另一个轴的传动方式。它通常用于传送带,可以应用于不同距离的传递,但动力传递并不精准。因此,选项D“动力传递精准”是不属于皮带传动特点的描述。选项A“可以应用于传送带”、选项B“能保护机械”和选项C“适合远距离传递动力”都是皮带传动的特点。
二、多选题
31、两物体之间产生摩擦力必须具备的条件有哪些?
A、两物体相互接触
B、两物体有相对运动或相对运动趋势
C、两物体大小一致
D、两物体材料一致
解析:【喵呜刷题小喵解析】:两物体之间产生摩擦力需要满足以下条件:A. 两物体相互接触:这是产生摩擦力的前提,因为摩擦力发生在两个物体接触的地方。B. 两物体有相对运动或相对运动趋势:当两个物体有相对运动或相对运动趋势时,它们之间的接触面会产生摩擦力来阻碍这种相对运动或运动趋势。选项C“两物体大小一致”和选项D“两物体材料一致”与摩擦力的产生条件无关,因此不应选。摩擦力的大小和性质主要取决于接触面的粗糙程度和正压力,而不是物体的大小或材料。
32、典型的棘轮机构由哪些构件组成?
A、棘轮
B、主动摆杆
C、止回棘爪
D、主动棘爪
解析:【喵呜刷题小喵解析】:棘轮机构是一种常用的间歇运动机构,其工作原理基于棘轮和棘爪的相互作用。棘轮是一个具有棘齿的轮子,棘爪则用于推动棘轮转动。在棘轮机构中,主动摆杆通常用于驱动棘爪,而止回棘爪则用于防止棘轮反向转动。主动棘爪则是用于与棘轮上的棘齿啮合,从而推动棘轮转动。因此,典型的棘轮机构由棘轮、主动摆杆、止回棘爪和主动棘爪组成。
33、影响“力”的效果的重要因素包括?
A、力的大小
B、力的方向
C、力的作用点
D、力的状态
解析:【喵呜刷题小喵解析】:力是物理学中的一个基本概念,它描述了物体之间的相互作用。力的大小、方向和作用点都是影响力效果的重要因素。力的大小决定了力作用的强度,力的方向决定了力作用的方向,力的作用点决定了力作用的具体位置。因此,选项A、B、C都是影响“力”的效果的重要因素。选项D“力的状态”并不是影响力的效果的直接因素,因此不应被选入。
34、如图关于该机构说法正确的有哪些?

A、这是槽轮机构
B、a是主动件
C、b是从动件
D、这是凸轮机构
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以清晰地看到这是一个槽轮机构。槽轮机构是一种常用的间歇运动机构,由主动槽轮、从动槽轮和机架组成。在槽轮机构中,主动槽轮是主动件,而从动槽轮是从动件。因此,选项A“这是槽轮机构”是正确的。选项B“a是主动件”也是正确的,因为题目中的a代表主动槽轮,它是主动件。选项C“b是从动件”也是正确的,因为题目中的b代表从动槽轮,它是从动件。选项D“这是凸轮机构”是不正确的,因为题目中的机构是槽轮机构,而不是凸轮机构。
35、皮带传动的缺点有哪些?
A、传动时间有延缓
B、传动时有能量的损失
C、传动不够精确
D、不适合远距离传动
解析:【喵呜刷题小喵解析】:皮带传动是一种常见的动力传递方式,但它也存在一些缺点。首先,皮带传动的时间会有延缓,因为皮带需要一定的时间来传递动力,这可能导致传动效率降低。其次,皮带在传动过程中会有能量的损失,因为皮带与带轮之间的摩擦会产生热量,导致部分能量转化为热能而损失。最后,皮带传动的精度不够高,因为皮带的弹性变形和伸长会影响传动的准确性。因此,选项A、B和C都是皮带传动的缺点。选项D“不适合远距离传动”并不是皮带传动的典型缺点,皮带传动可以用于远距离传动,只是需要更大的带轮和更长的皮带,因此D选项不正确。
三、判断题
36、皮带在传递动力的过程中会产生延迟。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:皮带在传递动力的过程中,由于摩擦、拉伸等原因,确实会产生一定的延迟。因此,该判断题的答案是正确(A)。
37、凸轮机构是一种高副机构。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:凸轮机构是一种高副机构,因为凸轮机构中的凸轮与从动件之间是通过点或线接触来传递运动和动力的,这种接触方式属于高副。因此,选项A“正确”是正确的。
38、世界上第一台可编程机器人是由美国人乔治德沃尔制造的。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:题目中提到世界上第一台可编程机器人是由美国人乔治德沃尔制造的。这是一个客观事实,所以选项A“正确”是正确的答案。
39、任何机械都不省功。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:这是关于功的原理的判断题。功的原理,也称为“不省功原理”,是由德国物理学家阿马德乌斯·伏特于18世纪提出。它指出:在使用任何机械都不使功增加,也不使功减少,而是功的传递与转化。也就是说,使用任何机械都不省功,机械本身的功能只是改变力或速度的方向,而不能凭空产生力或功。因此,答案是A,即“任何机械都不省功”是正确的。
40、链传动中的链轮旋转方向相同。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:链传动中的链轮旋转方向相同。在链传动中,链轮通过链条相互连接,链条在链轮上循环运动。为了保证链条的平稳运行,链轮的旋转方向需要相同,这样链条才能在链轮之间顺畅地传递动力。因此,链传动中的链轮旋转方向是相同的,答案为A。
41、齿轮传动可根据齿数计算传动比
A 正确
B 错误
解析:【喵呜刷题小喵解析】:齿轮传动的传动比可以通过齿数来计算。在齿轮传动中,两个相邻的齿轮,主动轮的齿数除以从动轮的齿数,即为传动比。因此,题目中的说法是正确的。
42、轮子上的花纹是为了减小摩擦力。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:轮子上的花纹是为了增大摩擦力,而不是减小摩擦力。花纹可以增加轮胎与地面之间的接触面积,从而增大摩擦力,提高车辆的稳定性和抓地力。因此,选项A“正确”是错误的,正确答案应为B“错误”。
43、现代机器人发展一共经历了三代。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:现代机器人发展确实经历了三代。第一代机器人是示教再现型机器人,它们只能按照预先编程好的动作进行重复操作。第二代机器人则具有了一定的自适应和自学习能力,能够根据环境和任务的变化进行一定的调整。第三代机器人则进一步发展了智能技术,能够像人一样进行感知、思考、学习和决策,具有更高的自主性和适应性。因此,题目中的说法是正确的。
44、摩擦力产生时物体一定发生了相对运动。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:摩擦力的产生条件是物体间存在相互作用的压力,并且接触面粗糙,同时两个物体间有相对运动或相对运动的趋势。所以,当摩擦力产生时,物体不一定发生了相对运动,也可能只是有相对运动的趋势。因此,题目的说法是错误的。
45、在复杂机构中,一般与电动机逻辑关系最近的是主动件
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在复杂机构中,与电动机逻辑关系最近的一般是主动件。主动件是指驱动机构运动的元件,而电动机通常作为动力源,为机构提供所需的驱动力。因此,主动件与电动机之间通常存在直接的逻辑关系,故答案为A。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




