



一、单选题
1、以下传动方式主动轮与从动轮转动方向不同的是?
A、两齿轮平行啮合
B、皮带开口传动
C、链传动
D、皮带平行传动
解析:【喵呜刷题小喵解析】:在齿轮传动中,主动轮和从动轮的转动方向是相反的。这是因为齿轮的工作原理是通过轮齿的啮合来传递运动和动力,主动轮的转动方向决定了从动轮的转动方向,但由于齿轮的啮合作用,两个轮的转动方向必然是相反的。因此,选项A“两齿轮平行啮合”主动轮与从动轮转动方向不同。选项B“皮带开口传动”、选项C“链传动”和选项D“皮带平行传动”中,主动轮和从动轮的转动方向都是相同的,因此可以排除。
2、()发明了测量路程用的“计里鼓车”,每走1里,击鼓1次,每走10里击钟一次。
A、东汉张衡
B、蜀国诸葛亮
C、春秋墨子
D、黄帝
解析:【喵呜刷题小喵解析】根据题目信息,“每走1里,击鼓1次,每走10里击钟一次”的计里鼓车是东汉张衡发明的。因此,正确答案为A,即东汉张衡。
3、以下不是连杆机构特点的是
A、低副接触耐磨损
B、设计比较复杂
C、制造简单易于获得较高的制造精度
D、可以实现复杂的运动规律
解析:
【喵呜刷题小喵解析】:低副接触耐磨损:连杆机构的运动副一般为低副,这意味着各构件以低副相连,接触面的压力小,容易进行润滑,机构磨损较小。
设计比较复杂:虽然连杆机构的设计可能相对复杂,但这并不意味着其制造简单或易于获得高制造精度。
制造简单易于获得较高的制造精度:尽管设计可能复杂,但连杆机构的制造相对简单,并且可以易于获得较高的制造精度。
然而,可以实现复杂的运动规律并不是连杆机构的特点。这一点在多个来源中被明确指出,表明连杆机构的主要特点并不包括能够实现复杂的运动规律。所以正确答案是D。
4、两艘船近距离并排航行着,两船中间的水流速度高于外侧,以下说法正确的是?
A、两艘船正常航行
B、两艘船逐渐靠近
C、两艘船逐渐远离
D、无法判断
解析:【喵呜刷题小喵解析】两艘船近距离并排航行时,两船中间的水流速度高于外侧,根据伯努利原理,流速大的地方压强小,流速小的地方压强大。因此,两船中间的水流速度高,压强小,外侧的水流速度低,压强大,外侧的水流会向中间挤压,导致两艘船逐渐靠近。因此,正确答案是B,即两艘船逐渐靠近。
5、水力发电机是将( )能转化为( )能。
A、机械,电
B、热能,电
C、化学,电
D、风,化学
解析:【喵呜刷题小喵解析】:水力发电机是一种利用水流的动力来产生电能的设备。水流的动力属于机械能,而水力发电机将这种机械能转化为电能。因此,正确答案是A选项,即水力发电机是将机械能转化为电能。其他选项如热能、化学能、风能等与水力发电机的原理不符。
6、关于凸轮机构,以下说法正确的是?
A、凸轮的转速决定从动件的运动规律
B、凸轮的轮廓曲线决定从动件运动的快慢
C、几何锁合凸轮机构利用特殊几何形状使凸轮和从动件始终保持接触
D、尖顶从动件一般只与盘形凸轮搭配
解析:【喵呜刷题小喵解析】:在凸轮机构中,凸轮的轮廓曲线决定了从动件的运动规律,而不是凸轮的转速。因此,选项A是错误的。凸轮的轮廓曲线决定了从动件的运动快慢,这是正确的,所以选项B是错误的。几何锁合凸轮机构利用特殊几何形状使凸轮和从动件始终保持接触,这是正确的,所以选项C是正确的。尖顶从动件可以与其他形状的凸轮搭配,而不仅仅是盘形凸轮,所以选项D是错误的。因此,正确答案是C。
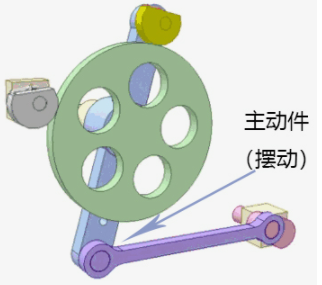
7、关于下图中的玩具,以下说法正确的是?

A、这个玩具为移动凸轮机构
B、这个玩具为平底从动件凸轮机构
C、这个玩具为摆动从动件凸轮机构
D、这个玩具将直线往复运动转化为圆周运动
解析:【喵呜刷题小喵解析】:根据题目中的图片,这个玩具是一个平底从动件凸轮机构。平底从动件凸轮机构是一种常见的凸轮机构,其从动件是一个平底,与凸轮的轮廓接触并跟随其运动。因此,选项B“这个玩具为平底从动件凸轮机构”是正确的。选项A“这个玩具为移动凸轮机构”错误,因为题目中的玩具并没有提到凸轮是在移动;选项C“这个玩具为摆动从动件凸轮机构”也错误,因为题目中的玩具的从动件并不是摆动的;选项D“这个玩具将直线往复运动转化为圆周运动”也错误,因为凸轮机构并不一定是将直线往复运动转化为圆周运动,它的运动形式取决于凸轮的轮廓和从动件的设计。
8、中国的家用电压是多少伏?
A、110
B、380
C、500
D、220
解析:【喵呜刷题小喵解析】:在中国,家用电压的标准是220伏。这是根据中国国家标准的规定,因此正确答案是D选项,即220伏。其他选项如110伏、380伏和500伏都不是中国家用电压的标准值。
9、关于前驱车,下列说法正确的是?
A、因为前驱车内部空间较大,所以大多数豪华车属于前驱车
B、动力系统效率高
C、起步加速表现好
D、重量分布更加均匀
解析:【喵呜刷题小喵解析】前驱车指的是发动机前置、前轮驱动的车辆。关于前驱车的几个说法中,A选项提到因为前驱车内部空间较大,所以大多数豪华车属于前驱车,这是不准确的,豪华车并不一定是前驱车,也有后驱车或四驱车。C选项说起步加速表现好,这也不是前驱车的特性,起步加速的表现与车辆的驱动方式没有直接关系。D选项说重量分布更加均匀,这也不是前驱车的特性,车辆的重量分布与驱动方式也没有直接关系。而B选项“动力系统效率高”是前驱车的一个特点,因为前驱车的动力传递路径相对较短,发动机的动力可以直接传递到前轮,减少了能量的损失,因此动力系统的效率相对较高。因此,正确答案是B。
10、如下图所示,该机构为?

A、单动式棘轮机构
B、双动式棘轮机构
C、双向式棘轮机构
D、内啮合棘轮机构
解析:【喵呜刷题小喵解析】:棘轮机构通常由棘轮和棘爪组成,棘轮上沿圆周分布有若干径向棘齿,棘爪则可以限制棘轮的转动方向。棘轮机构可分为单动式、双动式、双向式以及内啮合式等类型。根据题目中的图片,棘轮机构中棘爪位于棘轮的两侧,可以同时推动棘轮转动,因此属于双动式棘轮机构。因此,正确答案为B,即双动式棘轮机构。
11、关于连杆机构,下列说法错误的是
A、汽车发动机含有连杆机构
B、剪叉式升降机采用连杆机构
C、挖掘机机械臂采用连杆机构
D、骑自行车时大腿、小腿与自行车曲柄构成曲柄滑块机构
解析:【喵呜刷题小喵解析】:连杆机构是由一系列杆件通过铰链连接而成的机构,它能够实现运动传递和变换。A选项提到汽车发动机含有连杆机构,这是正确的,因为汽车发动机的活塞与曲轴之间就是通过连杆连接的。B选项提到剪叉式升降机采用连杆机构,这也是正确的,剪叉式升降机通过一系列连杆的伸缩来实现升降功能。C选项提到挖掘机机械臂采用连杆机构,这也是正确的,挖掘机的机械臂通常是由多个连杆组成的。然而,D选项提到骑自行车时大腿、小腿与自行车曲柄构成曲柄滑块机构,这是错误的。实际上,骑自行车时,大腿和小腿与自行车曲柄构成的是曲柄摇杆机构,而不是曲柄滑块机构。因此,D选项是错误的。
12、关于曲柄摇杆及曲柄滑块,下列说法正确的是?
A、曲柄滑块机构只由曲柄及滑块两部分组成
B、曲柄滑块机构只能将直线往复运动转化为圆周运动
C、曲柄摇杆机构与曲柄滑块机构都包含连杆机构
D、曲柄摇杆机构只能将圆周运动转化为往复摆动
解析:【喵呜刷题小喵解析】A选项提到曲柄滑块机构只由曲柄及滑块两部分组成,这是不准确的。曲柄滑块机构除了曲柄和滑块,还包括连接它们的连杆。B选项表示曲柄滑块机构只能将直线往复运动转化为圆周运动,这是错误的。曲柄滑块机构的作用是将圆周运动转化为直线往复运动。C选项说曲柄摇杆机构与曲柄滑块机构都包含连杆机构,这是正确的。曲柄摇杆机构包括曲柄、连杆和摇杆,而曲柄滑块机构包括曲柄、连杆和滑块。D选项表示曲柄摇杆机构只能将圆周运动转化为往复摆动,这是不准确的。曲柄摇杆机构的作用是将圆周运动转化为往复摆动,但也可以将往复摆动转化为圆周运动。因此,正确答案是C选项。
13、静止在水平地面上的一台汽车,轮胎与地面产生哪种摩擦力?
A、静摩擦力
B、滚动摩擦力
C、滑动摩擦力
D、不产生摩擦力
解析:【喵呜刷题小喵解析】汽车静止在水平地面上,没有发生相对运动或相对运动的趋势,因此轮胎与地面之间不产生摩擦力。所以正确答案是D选项,即不产生摩擦力。静摩擦力、滚动摩擦力和滑动摩擦力都是发生在有相对运动或相对运动趋势的物体之间的摩擦力,而本题中汽车并没有发生这样的运动或趋势,因此不会产生摩擦力。
14、下列选项中,不属于间歇运动机构的是?
A、槽轮机构
B、凸轮机构
C、棘轮机构
D、齿轮机构
解析:【喵呜刷题小喵解析】:间歇运动机构是指能够将连续旋转运动转变为间歇旋转运动的机构。在给出的选项中,槽轮机构、凸轮机构和棘轮机构都是间歇运动机构,它们都能将连续旋转运动转变为间歇旋转运动。而齿轮机构则是将旋转运动从一个轴传递到另一个轴的机构,它不能实现间歇运动,因此不属于间歇运动机构。因此,正确答案是D选项,即齿轮机构。
15、以下不是带传动缺点的是?
A、传递动力有延迟
B、无法精确传递动力
C、不适合远距离传动
D、皮带速度过大或者突然加速会导致皮带断裂或打滑
解析:【喵呜刷题小喵解析】带传动是一种常见的动力传递方式,其工作原理是通过皮带将动力从一个轴传递到另一个轴。带传动具有以下特点:A. 传递动力有延迟:由于皮带的弹性变形和摩擦阻力,带传动在传递动力时存在一定的延迟,即动力不能立即从主动轮传递到从动轮。B. 无法精确传递动力:带传动中,由于皮带的弹性变形和打滑现象,其传递的动力有一定的误差,无法实现精确的动力传递。C. 不适合远距离传动:这是不正确的。实际上,带传动特别适合远距离传动,因为它可以有效地分散动力,减小单位长度上的功率流密度,从而降低应力集中和磨损。此外,带传动还具有结构简单、成本低廉、维护方便等优点。D. 皮带速度过大或者突然加速会导致皮带断裂或打滑:这是带传动的一个潜在问题。当皮带速度过快或突然加速时,皮带可能会因为离心力和摩擦力的增加而断裂或打滑,从而影响传动效率和可靠性。因此,选项C“不适合远距离传动”不是带传动的缺点。
16、感知型机器属于第几代机器人?
A、第一代
B、第二代
C、第三代
D、第四代
解析:【喵呜刷题小喵解析】:感知型机器人是指具备感知环境并作出相应反应的机器人,属于第二代机器人。第一代机器人主要完成较为简单的任务,而第二代机器人则具备了感知和一定的决策能力,可以进行更为复杂和智能化的操作。感知型机器人在实际应用中表现出了强大的适应性和灵活性,为人们的生活和工作带来了便利和效率。
17、平面连杆机构构件之间的运动副是下列哪一种?
A、高副
B、低副
C、中副
D、无法判断
解析:【喵呜刷题小喵解析】:平面连杆机构是机械工程中常见的机构类型,其构件之间通过运动副进行连接。运动副分为高副和低副两种。高副是指两构件通过点或线接触,如齿轮、凸轮机构等;低副是指两构件通过面接触,如滑动轴承、平面连杆机构等。平面连杆机构的构件之间是通过面接触实现相对运动的,因此属于低副。因此,正确答案为“低副”。
18、如下图所示,该机构为?
A、双动式棘轮机构
B、摩擦式棘轮机构
C、滑轮
D、凸轮机构
解析:【喵呜刷题小喵解析】:根据提供的图片,该机构具有棘轮和棘爪的结构,棘轮上刻有棘齿,棘爪用于卡住棘齿以传递动力。当棘爪被外力推动时,棘轮会随之转动,而当外力消失时,棘爪会卡住棘齿,防止棘轮反转。这种机构被称为摩擦式棘轮机构,因此选项B是正确的。其他选项,如双动式棘轮机构、滑轮和凸轮机构,与图片中的机构不符。
19、关于“伯努利效应”,下列说法不正确的是?
A、也叫做“边界层表面效应”
B、适用于包括液体和气体在内的一切理想流体
C、飞机飞行运用了伯努利效应
D、流体速度加快时,物体与流体接触的界面上的压强会增大
解析:【喵呜刷题小喵解析】:伯努利效应,也称为“边界层表面效应”,主要适用于包括液体和气体在内的一切理想流体。这一效应指出,流体速度加快时,物体与流体接触的界面上的压强会减小,而不是增大。因此,选项D的说法是不正确的。飞机飞行时,其机翼的设计正是基于这一效应,使机翼上方流速加快,压强减小,从而产生升力。所以,正确答案是D。
20、齿轮传动的缺点是?
A、噪声比较大
B、能精确的传递动力
C、容易打滑
D、只能在同一平面内安装
解析:【喵呜刷题小喵解析】:齿轮传动的缺点包括噪声比较大,因为齿轮在转动过程中会产生摩擦和碰撞,从而产生噪声。而选项B“能精确的传递动力”和选项D“只能在同一平面内安装”并不是齿轮传动的缺点,反而是其优点。选项C“容易打滑”也不适用于齿轮传动,齿轮的设计就是确保动力的精确传递,而不是容易打滑。因此,选项A“噪声比较大”是齿轮传动的缺点之一,所以选A。
21、关于滑动摩擦力,以下说法正确的是?
A、滑动摩擦力跟物体接触面粗糙程度有关
B、滑动摩檫力小于滚动摩檫力
C、滑动摩檫力大于最大静摩檫力
D、滑动摩擦力的大小跟接触面所受的压力无关
解析:【喵呜刷题小喵解析】滑动摩擦力的大小与接触面的粗糙程度有关,接触面越粗糙,滑动摩擦力越大,故A正确;一般情况下,滑动摩擦力大于滚动摩擦力,故B错误;当物体做匀速直线运动时,滑动摩擦力等于物体受到的拉力,滑动摩擦力不一定大于最大静摩擦力,故C错误;滑动摩擦力的大小与接触面所受的压力有关,接触面所受的压力越大,滑动摩擦力越大,故D错误。
22、关于双曲柄机构,下列说法不正确的是?
A、双曲柄机构属于铰链四杆机构
B、双曲柄机构与基座连接的两杆均为曲柄
C、双曲柄机构中最短杆与最长杆长度之和大于其余两杆长度之和
D、双曲柄机构两曲柄均做圆周运动
解析:【喵呜刷题小喵解析】:双曲柄机构是一种铰链四杆机构,其中两个杆件都是曲柄,它们都可以做圆周运动。在双曲柄机构中,最短杆与最长杆长度之和应小于或等于其余两杆长度之和,这是四杆机构满足双曲柄条件的必要条件之一。因此,选项C“双曲柄机构中最短杆与最长杆长度之和大于其余两杆长度之和”是不正确的说法。
23、下图所示机械是?

A、钻井机
B、采油机
C、打桩机
D、加气机
解析:【喵呜刷题小喵解析】:从提供的图片中,我们可以看到机械的结构和功能特点。机械有一个大型的圆柱形部分,很可能是用于抽取液体,如石油。此外,该机械具有一个支撑结构和用于操作的控制系统,这是许多石油抽取设备常见的特征。因此,根据这些特点,我们可以推断该机械最可能是用于抽取石油的采油机。选项B“采油机”与图片中的机械最为匹配,因此是正确答案。
24、以下哪个不是皮带传动的常用方式?
A、平行传动
B、交叉传动
C、半交叉传动
D、弹力传动
解析:【喵呜刷题小喵解析】:皮带传动是一种常见的动力传递方式,用于连接两个或多个旋转轴。在皮带传动中,常用的方式包括平行传动、交叉传动和半交叉传动。平行传动是指皮带的运行方向与驱动轴和被驱动轴平行;交叉传动是指皮带的运行方向与驱动轴和被驱动轴呈一定角度;半交叉传动则是介于两者之间的一种形式。然而,弹力传动并不是皮带传动的常用方式。因此,选项D“弹力传动”不是皮带传动的常用方式。
25、关于下图机械结构各部分的动作,说法正确的是?
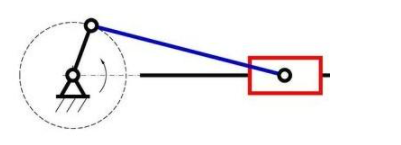
A、曲柄做摇摆运动
B、曲柄做圆周运动
C、连杆做圆周运动
D、滑块做圆周运动
解析:【喵呜刷题小喵解析】根据图片中的机械结构,我们可以看到,曲柄在连接点A处固定,并通过转动轴与滑块连接。曲柄在做圆周运动,而非摇摆运动,所以选项B“曲柄做圆周运动”是正确的。而连杆在连接点C处与滑块连接,随着滑块的运动而运动,但并不做圆周运动,所以选项C“连杆做圆周运动”是错误的。至于滑块和滑块D,它们在连接点D处与曲柄连接,滑块在曲柄的驱动下做往复运动,但并非圆周运动,因此选项D“滑块做圆周运动”也是错误的。所以,正确的答案是选项B。
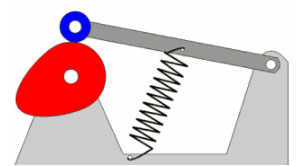
26、如下图所示,该机构为?

A、摩擦式棘轮机构
B、外啮合棘轮机构
C、力锁合凸轮机构
D、几何锁合凸轮机构
解析:【喵呜刷题小喵解析】:根据题目中的图片,该机构为力锁合凸轮机构。力锁合凸轮机构是一种通过力作用实现锁合的机构,其工作原理是当驱动件推动从动件时,由于从动件受到一定的阻力,驱动件需要施加一定的力才能推动从动件,从而实现锁合。与摩擦式棘轮机构和外啮合棘轮机构不同,力锁合凸轮机构并不是通过摩擦力或外啮合作用实现锁合的。因此,正确答案为C。
27、 下图棘轮机构中,绿色零件为?
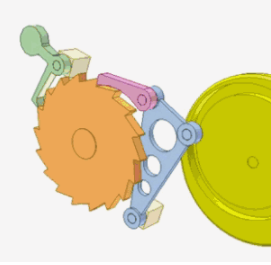
A、止回棘爪
B、主动棘爪
C、主动摆杆
D、机架
解析:【喵呜刷题小喵解析】:根据题目中给出的图片,我们可以看到棘轮机构中的各个零件。根据棘轮机构的常识,止回棘爪是用于防止棘轮反向转动的零件,而主动棘爪则是用于驱动棘轮转动的零件。根据图片中的绿色零件,我们可以看出它是用于防止棘轮反向转动的,因此可以判断它是止回棘爪。因此,正确答案是A,即止回棘爪。
28、我们穿的鞋子的鞋底大多数都有花纹,主要是为了?
A、增大摩擦力
B、个性设计,更加美观
C、节省原料,更加环保
D、减轻重量
解析:【喵呜刷题小喵解析】:鞋底的花纹是为了增大摩擦力,因为鞋底与地面接触时,花纹可以增大接触面的粗糙度,从而增大摩擦力,防止滑倒。所以,鞋底大多数都有花纹的主要目的是为了增大摩擦力。选项A是正确的。其他选项,如个性设计、节省原料和减轻重量,与鞋底花纹的主要目的不符。
29、如下图所示,该机构为?

A、摆动平底从动件凸轮机构
B、摆动滚子从动件凸轮机构
C、直动尖顶从动件凸轮机构
D、直动滚子从动件凸轮机构
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到这是一个摆动滚子从动件凸轮机构。因此,正确答案是B。其他选项A、C、D分别对应摆动平底从动件凸轮机构、直动尖顶从动件凸轮机构和直动滚子从动件凸轮机构,与题目中的图片不符。
30、意大利文艺复兴时期,()作为发明家发明了机器人、机械车、子母弹、坦克车、潜水艇、直升机等超越时代的装置。
A、达芬奇
B、米开朗琪罗
C、多纳泰罗
D、拉斐尔
解析:【喵呜刷题小喵解析】:达芬奇是文艺复兴时期意大利著名的艺术家、科学家和发明家,他的发明成果丰富多样,包括机器人、机械车、子母弹、坦克车、潜水艇和直升机等超越时代的装置。这些发明体现了达芬奇在机械和工程领域的卓越才能和深邃思考。因此,正确答案是A,即达芬奇。
二、多选题
31、双手合十想让双手之间产生滑动摩擦力必须具备哪些条件?
A、双手相互接触
B、双手有相对运动趋势
C、双手发生相对运动
D、双手运动速度一致
解析:【喵呜刷题小喵解析】:滑动摩擦力是当两个物体接触并发生相对运动时,在接触面上产生的阻碍它们相对运动的力。根据摩擦力的定义,双手合十想让双手之间产生滑动摩擦力,必须满足两个条件:A.双手相互接触 - 这是产生摩擦力的前提条件,两个物体必须接触。C.双手发生相对运动 - 这是产生滑动摩擦力的必要条件,两个物体之间必须有相对运动。选项B“双手有相对运动趋势”和选项D“双手运动速度一致”与滑动摩擦力的产生没有直接关系。有相对运动趋势并不一定会产生滑动摩擦力,而双手运动速度一致则意味着它们之间没有相对运动,因此不会产生滑动摩擦力。
32、链传动的特点有哪些?
A、适用于远距离传动
B、可以精确地传递动力
C、长度可以调节
D、可任意角度啮合
解析:【喵呜刷题小喵解析】:链传动是一种利用链条和链轮之间的啮合来传递动力的方式。它适用于远距离传动,因为链条可以绕过障碍物或改变方向,从而实现远距离的动力传递。此外,链传动的长度可以根据需要进行调节,以适应不同的传动需求。然而,链传动并不能精确地传递动力,因为链条和链轮之间的啮合存在间隙和摩擦,会导致动力的损失。另外,链传动也不能任意角度啮合,啮合角度通常是固定的。因此,选项A和C是正确的,而选项B和D是不正确的。
33、如下图所示,关于该机构说法正确的是?
A、该机构为凸轮机构
B、该机构采用几何锁合
C、该机构从动件为滚子从动件
D、该机构从动件运动形式为直动
解析:【喵呜刷题小喵解析】根据题目中的图片,我们可以观察到该机构的特点。选项A提到该机构为凸轮机构,从图片中我们可以看到,有一个凸轮和一个随动件(从动件)组成,因此可以判断该机构为凸轮机构,所以选项A是正确的。选项B提到该机构采用几何锁合,但从图片中我们无法直接看出该机构是否采用几何锁合,因此选项B无法确定。选项C提到该机构从动件为滚子从动件,从图片中我们可以看到,从动件是一个圆柱形的滚子,因此可以判断该机构的从动件为滚子从动件,所以选项C是正确的。选项D提到该机构从动件运动形式为直动,但从图片中我们只能看到从动件的运动轨迹,无法确定其具体的运动形式,因此选项D无法确定。综上所述,正确的选项是A和C。
34、以下哪些属于力的三要素?
A、力的作用点
B、力的大小
C、力的方向
D、力的作用效果
解析:【喵呜刷题小喵解析】:力的三要素是描述力的三个基本属性,即力的作用点、力的大小和力的方向。这三个要素共同决定了力的效果。选项nA、nB和nC分别对应这三个要素,而选项D“力的作用效果”并不是力的三要素之一,而是力作用后的结果。因此,正确答案是选项nA、nB和nC。
35、以下机构或方法能将连续运动转化为间歇运动的是?
A、电流时有时无
B、槽轮机构
C、棘轮机构
D、不完全齿轮机构
解析:【喵呜刷题小喵解析】:电流时有时无不能直接将连续运动转化为间歇运动,但可以通过控制电流通断来实现间歇运动。槽轮机构、棘轮机构和不完全齿轮机构都是能将连续运动转化为间歇运动的机构。槽轮机构通过槽轮与固定销的啮合来实现间歇运动;棘轮机构通过棘爪与棘轮的啮合来实现间歇运动;不完全齿轮机构则是通过齿轮的某些齿缺失来实现间歇运动。因此,选项A、B、C和D都是正确的。
三、判断题
36、不完全齿轮机构属于间歇运动机构,主动件为完整齿轮。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:不完全齿轮机构,其主动件不是完整齿轮,而是齿条或滑块等。当不完全齿轮在齿条上移动时,通过与固定齿轮的啮合,实现间歇运动。因此,该题目的说法“不完全齿轮机构属于间歇运动机构,主动件为完整齿轮”是不正确的。所以,正确答案是B。
37、链传动动力传递过程中会产生延迟。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:链传动在动力传递过程中确实存在延迟现象,但这种延迟通常是由于链条的弹性变形和摩擦等因素引起的,而不是链传动本身产生的。因此,说链传动动力传递过程中会产生延迟是不准确的,所以答案选B,即错误。
38、2014年,在英国皇家学会举行的“2014图灵测试”大会上,聊天程序“尤金·古斯特曼”(Eugene Goostman)首次通过了图灵测试。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:根据题目信息,2014年,在英国皇家学会举行的“2014图灵测试”大会上,聊天程序“尤金·古斯特曼”(Eugene Goostman)首次通过了图灵测试。因此,题目中的陈述是正确的,答案为A。
39、齿轮传动可根据齿轮的半径大小计算传动比。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:齿轮传动中,传动比是指主动轮与从动轮的角速度之比,或者说齿数之比。在齿轮传动中,传动比与齿轮的半径大小有关。对于两个相邻的齿轮,如果主动轮的半径为R1,从动轮的半径为R2,那么传动比i为R2/R1。因此,题目中的说法是正确的。
40、皮带传动在突然变速时可以保护机械。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:皮带传动在突然变速时,由于皮带的弹性,可以吸收部分冲击,从而起到保护机械的作用。因此,皮带传动在突然变速时可以保护机械的说法是正确的。
41、1959年,乔治·德沃尔制造世界第一台工业机器人,他也被称为“工业机器人之父”。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:乔治·德沃尔虽然对工业机器人领域做出了重要贡献,但他并不是第一个制造工业机器人的人。实际上,世界上第一台工业机器人是由约瑟夫·恩格尔伯格在1920年代发明的,因此乔治·德沃尔被称为“工业机器人之父”的说法是不准确的。因此,答案为B,即该说法是错误的。
42、电动机按照供电方式分为直流电动机和交流电动机。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:电动机按照供电方式确实分为直流电动机和交流电动机。直流电动机使用直流电源供电,而交流电动机使用交流电源供电。因此,题目中的陈述是正确的。
43、直升机飞上天空主要是因为,起飞时机翼下方气压比上方气压大。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:这个说法是正确的。直升机在起飞时,其旋翼产生向上的升力,使机身离开地面。旋翼下方的空气被向下推动,而旋翼上方的空气相对没有被向下推动,因此旋翼下方的气压相对较高,旋翼上方的气压相对较低,这就是产生升力的原因。所以,起飞时机翼下方气压比上方气压大是正确的。
44、火车站、飞机场处安检机利用皮带传动来运行李,属于交叉传动。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:题目中描述“火车站、飞机场处安检机利用皮带传动来运行李”,但实际情况是,安检机并不是利用皮带传动来运行李的。因此,题目的陈述是不准确的,所以答案选择B,即错误。实际上,安检机内部使用的传送带通常是链传动或齿轮传动,而不是皮带传动。皮带传动一般用于长距离、低速度的场合,如皮带运输机等。而安检机中的传送带通常是在较短的距离内,以相对较高的速度运行,因此更适合使用链传动或齿轮传动。因此,题目中的陈述是错误的。
45、后驱车重心分布偏后。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:后驱车是指动力通过传动轴或者类似的传动机构传递到后轮,由后轮推动车辆前进的驱动方式。后驱车重心分布偏后这一说法是不准确的。实际上,后驱车由于发动机和传动装置的位置,其重心往往位于车辆的前半部分,而不是偏后。因此,选项B“错误”是正确的答案。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




