



一、单选题
1、机器人三定律是由谁提出的?
A、日本的机器人专家森昌弘
B、美国科幻巨匠阿西莫夫
C、美国发明家约瑟夫·英格伯格
D、捷克斯洛伐克剧作家卡尔·恰佩克
解析:【喵呜刷题小喵解析】:机器人三定律是由美国科幻巨匠阿西莫夫提出的。这个定律在科幻文学和机器人学中都有深远的影响,被视为机器人伦理学的基石。因此,正确答案是B,即美国科幻巨匠阿西莫夫。
2、中国记录最早的陆地军用机器人是?
A、指南车
B、美国大狗机器人
C、木牛流马
D、索尼公司的AIBO机器狗
解析:【喵呜刷题小喵解析】:题目询问中国记录最早的陆地军用机器人是什么。在选项中,A选项“指南车”是古代中国的一种用于指示方向的车辆,并非军用机器人;B选项“美国大狗机器人”是美国的一种军用机器人,但并非中国记录最早的;D选项“索尼公司的AIBO机器狗”是索尼公司推出的一款家用机器人宠物狗,与军用机器人无关。而C选项“木牛流马”是三国时期蜀汉丞相诸葛亮发明的运输工具,虽然最初并非为军事用途设计,但在后来的历史中,它被用于军事运输,因此可以视为一种陆地军用机器人。因此,正确答案是C选项“木牛流马”。
3、智能机器人属于第几代机器人?
A、第一代
B、第二代
C、第三代
D、第四代
解析:【喵呜刷题小喵解析】:智能机器人属于第三代机器人。在机器人技术的发展历程中,第一代机器人主要是工业机器人,可以进行重复性的简单劳动。第二代机器人具有一定的自适应能力和学习能力,能够根据环境的变化调整行为。第三代机器人则加入了感知和认知能力,可以通过传感器、摄像头等感知环境,理解人类的指令和意图,具备一定的学习和自我调整能力,即智能机器人。因此,智能机器人属于第三代机器人。
4、静止在斜面上的物体所受到的力不包括?
A、重力
B、压力
C、摩擦力
D、支持力
解析:【喵呜刷题小喵解析】:在斜面上的物体受到重力、支持力和摩擦力。重力是由于地球对物体的吸引而产生的力,支持力是斜面对物体施加的力,摩擦力是物体与斜面之间由于相对运动或相对运动趋势而产生的力。而压力是物体对支持面施加的力,不是物体受到的力,而是物体施加的力。因此,物体所受到的力不包括压力。
5、目前最常用的机器人驱动方式是?
A、手动
B、电力驱动
C、核能驱动
D、风能驱动
解析:【喵呜刷题小喵解析】:目前最常用的机器人驱动方式是电力驱动,因为电力驱动具有可靠性高、稳定性好、控制精确、适应性强等优点,而且电源广泛可获取,便于实现机器人的长时间稳定运行。手动、核能、风能驱动方式都有其限制和不足,因此在机器人应用中不如电力驱动广泛。
6、自行车轮胎或汽车的轮胎上都有花纹,是为了?
A、增大与地面间的摩擦,防止打滑
B、美观
C、降低生产成本
D、便于维修保养
解析:【喵呜刷题小喵解析】自行车轮胎或汽车的轮胎上都有花纹,是为了增大与地面间的摩擦,防止打滑。因为轮胎上的花纹可以增加轮胎与地面之间的摩擦力,从而提高车辆的稳定性和安全性。因此,选项A是正确的。选项B、C、D都与轮胎上花纹的作用无关,因此是错误的。
7、为了减小滑动摩擦力,一般会把滑动摩擦转化为?
A、滑动摩擦
B、滚动摩擦
C、运动摩擦
D、静摩擦
解析:【喵呜刷题小喵解析】:减小滑动摩擦力的一种常见方法是将滑动摩擦转化为滚动摩擦。滚动摩擦相对于滑动摩擦来说,摩擦力要小得多。因此,选项B“滚动摩擦”是正确的答案。选项A“滑动摩擦”与题目要求减小摩擦力的目标相悖,选项C“运动摩擦”和选项D“静摩擦”在物理学中并没有明确的定义,因此它们都不是正确答案。
8、机械小车左右两个轮分别由两个电机控制,下列哪种情况能让小车向前走的同时向左转?
A、左电机速度100,右电机速度50
B、左电机速度50,右电机速度100
C、左电机速度100,右电机速度0
D、左电机速度0,左电机速度100
解析:【喵呜刷题小喵解析】机械小车左右两个轮分别由两个电机控制,要让小车向前走的同时向左转,需要左轮的速度大于右轮的速度。在给出的选项中,只有B选项满足这个条件,即左电机速度50,右电机速度100。这种情况下,左轮的速度大于右轮的速度,小车会向前走的同时向左转。因此,正确答案是B。
9、如图鞋底花纹是为了?

A、增大与地面的摩擦力
B、减小与地面的摩擦力
C、美观
D、按摩脚部
解析:【喵呜刷题小喵解析】:鞋底花纹的主要目的是增大与地面的摩擦力,防止滑倒。这种设计通过增加鞋底与地面之间的接触面积和粗糙度,使得鞋子在行走或跑步时能够更稳定地附着在地面上。因此,选项A“增大与地面的摩擦力”是正确的。选项B“减小与地面的摩擦力”与题意相反,选项C“美观”虽然可能是设计花纹的一个次要目的,但并不是其主要目的,选项D“按摩脚部”与鞋底花纹的功能无关。
10、如图,小朋友用力推箱子,但箱子没动,那么箱子和地面之间( )。
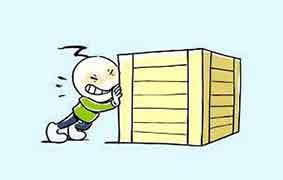
A、有滑动摩擦力
B、有滚动摩擦力
C、有静摩擦力
D、没有摩擦力
解析:【喵呜刷题小喵解析】小朋友用力推箱子,但箱子没动,说明箱子和地面之间并没有发生相对运动,因此不存在滑动摩擦力。同时,箱子也没有在地面上滚动,所以也不存在滚动摩擦力。但是,小朋友对箱子有推力,这个推力会使箱子有相对地面运动的趋势,所以箱子和地面之间存在静摩擦力,用来平衡小朋友的推力,使箱子保持静止。因此,正确答案是C,箱子和地面之间有静摩擦力。
11、以下是后轮驱动优点的是?
A、增加内部空间
B、减轻车身重量
C、造价低
D、操控性好,起步加速表现好
解析:【喵呜刷题小喵解析】:后轮驱动的优点主要包括操控性好和起步加速表现好。后轮驱动的车辆在操控上更加稳定,因为发动机和驱动轮是分开的,这使得车辆的重心更加平衡,从而提高了操控性。同时,后轮驱动的车辆在起步和加速时表现也更好,因为驱动轮直接承受发动机的动力输出,能够更快地响应加速踏板。因此,选项D“操控性好,起步加速表现好”是后轮驱动的优点。而选项A“增加内部空间”并不是后轮驱动特有的优点,选项B“减轻车身重量”也与后轮驱动无直接关联,选项C“造价低”并不是后轮驱动相比于其他驱动方式的主要优点。
12、如图关于自行车说法错误的是?

A、自行车轮上的花纹是为了增加摩擦力,防止打滑
B、采用了皮带传动
C、大链轮和小链轮的旋转方向相同
D、自行车框架采用了三角形结构增加稳定性
解析:【喵呜刷题小喵解析】:自行车轮上的花纹是为了增加摩擦力,防止打滑,A选项正确;自行车采用了链条传动,而不是皮带传动,B选项错误;大链轮和小链轮的旋转方向相同,C选项正确;自行车框架采用了三角形结构增加稳定性,D选项正确。因此,B选项“采用了皮带传动”说法错误。
13、如图,下列哪个是内啮合棘轮机构?
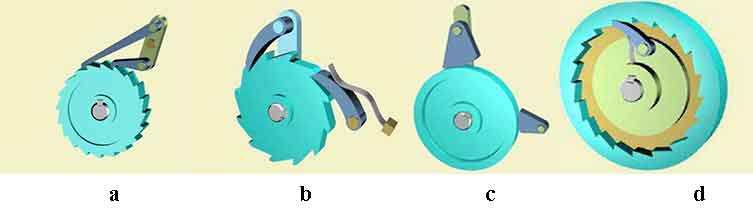
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】内啮合棘轮机构是指棘轮与棘爪在同一机构内部相互啮合,而不是像外啮合棘轮机构那样棘轮与棘爪在机构外部相互啮合。从图中可以看出,选项D中的棘轮与棘爪在同一机构内部相互啮合,符合内啮合棘轮机构的定义。因此,选项D是内啮合棘轮机构。
14、下列图片中哪个是完全齿轮的啮合?
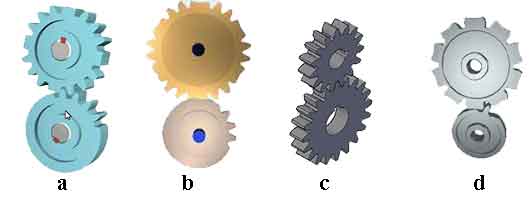
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】齿轮啮合是指两个齿轮相互咬合,使它们能够传递动力。在提供的图片中,齿轮A和齿轮B的齿数明显不匹配,齿轮A的齿数明显少于齿轮B,因此它们无法完全啮合。齿轮C和齿轮D的齿数匹配,它们可以完全啮合,因此能够传递动力。因此,正确答案是C。
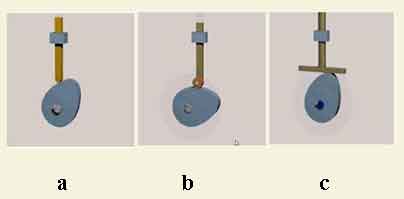
15、如图所示是?
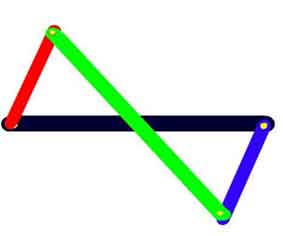
A、曲柄滑块机构
B、曲柄摇杆机构
C、反向双曲柄机构
D、平行双曲柄机构
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到两个曲柄,且它们之间通过滑块连接。这种机构被称为反向双曲柄机构。因此,正确答案是C,即“反向双曲柄机构”。
16、凸轮按形状分类,不包括?
A、盘形凸轮
B、移动凸轮
C、尖顶凸轮
D、圆柱凸轮
解析:【喵呜刷题小喵解析】:凸轮按形状分类,通常包括盘形凸轮、移动凸轮和圆柱凸轮。盘形凸轮的形状为圆盘,移动凸轮是沿某一方向直线移动,而圆柱凸轮则是圆柱形。而尖顶凸轮并不属于常见的凸轮形状分类,因此选项C“尖顶凸轮”是不包括在凸轮按形状分类中的。
17、如图,该机构的名称为?
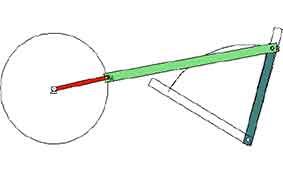
A、曲柄摇杆机构
B、曲柄滑块机构
C、双摇杆机构
D、双曲柄机构
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到机构中有一个曲柄和一个摇杆,且曲柄和摇杆之间通过连杆连接。这种机构称为曲柄摇杆机构。因此,正确答案为A选项,即曲柄摇杆机构。
18、对于图中机构说法正确的是?
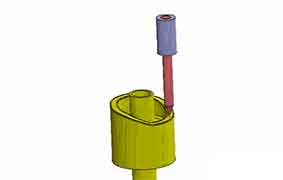
A、这是盘形凸轮
B、这是圆柱凸轮
C、采用了平底从动件
D、采用了滚子从动件
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到机构中的凸轮是圆柱形的,而不是盘形的。因此,选项A“这是盘形凸轮”是错误的。另外,从动件的类型没有在图片中明确给出,因此无法确定是否采用了平底或滚子从动件。因此,选项C“采用了平底从动件”和选项D“采用了滚子从动件”都是无法确定的。根据图片中的凸轮形状,我们可以确定选项B“这是圆柱凸轮”是正确的。
19、如图,这是?
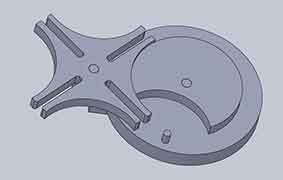
A、凸轮机构
B、曲柄机构
C、棘轮机构
D、槽轮机构
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到一个具有多个轮齿的机构,这种机构是槽轮机构。槽轮机构是一种间歇运动机构,由主动拨盘、从动槽轮和机架组成。当主动拨盘上的拨销进入或退出从动槽轮的轮槽时,槽轮会转动一定的角度,从而实现间歇运动。因此,正确答案是槽轮机构,即选项D。
20、如图,关于该机构说法错误的是?
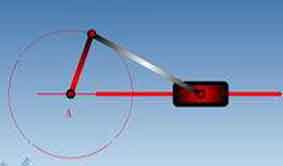
A、这是曲柄滑块机构
B、曲柄做回转运动
C、滑块按既定轨道滑动
D、连杆做圆周运动
解析:【喵呜刷题小喵解析】:在曲柄滑块机构中,曲柄做回转运动,滑块沿既定轨道滑动,而连杆并不是做圆周运动,而是做平面运动。因此,选项D的说法是错误的。
21、如图,关于该凸轮的锁合方式说法正确的是?

A、这是槽凸轮机构的锁合
B、这是重力锁合
C、这是弹力锁合
D、这是共轭凸轮机构的锁合
解析:【喵呜刷题小喵解析】:题目中的图像显示了一个凸轮的轮廓,而凸轮的锁合方式主要取决于其结构设计和作用原理。槽凸轮机构通常是通过槽轮与齿轮的啮合来实现锁合,但题目中的图像并未明确显示出槽轮的存在。重力锁合通常是利用重力的作用使两个零件相互压紧,但题目中的图像也没有显示出与重力锁合相关的特征。弹力锁合则是通过弹力作用使两个零件相互压紧,这种锁合方式在凸轮机构中比较常见,尤其是当凸轮的轮廓与从动件之间需要保持一定的压紧力时。共轭凸轮机构的锁合通常是通过两个凸轮轮廓的共轭关系来实现,但题目中的图像并未显示出共轭凸轮的特征。因此,根据题目中的图像和凸轮机构的一般原理,可以判断这是弹力锁合。所以,正确答案是C,这是弹力锁合。
22、如图,说法错误的是?
A、三个都是凸轮机构
B、a图中的凸轮是圆柱凸轮
C、b图中的从动件采用了滚子从动件
D、c图中的从动件采用了平底从动件
解析:【喵呜刷题小喵解析】:从图中可以看出,a图所示的是盘形凸轮机构,而非圆柱凸轮机构,因此选项B的说法是错误的。而a图中的从动件采用了平底从动件,c图中的从动件也采用了平底从动件,与选项C和D的说法一致,因此选项C和D的说法是正确的。因此,说法错误的是选项B。
23、以下哪项是平底从动件凸轮机构特征?
A、凸轮只能是外凸的
B、凸轮只能是内凹的
C、凸轮的形状没有限制
D、凸轮必须是圆柱凸轮
解析:【喵呜刷题小喵解析】:平底从动件凸轮机构中,凸轮的轮廓与平底从动件接触,因此凸轮的轮廓必须是外凸的,以提供足够的支撑和导向作用。选项A“凸轮只能是外凸的”符合平底从动件凸轮机构的特征。选项B“凸轮只能是内凹的”与平底从动件凸轮机构的特征相反,不正确。选项C“凸轮的形状没有限制”虽然理论上正确,但在平底从动件凸轮机构中,凸轮的轮廓必须是外凸的,因此也不正确。选项D“凸轮必须是圆柱凸轮”没有特定于平底从动件凸轮机构的特征,因此也不正确。因此,正确答案是A。
24、如果制作一个机械尺蠖,让它向一个方向移动,我们需要的装置是?
A、棘轮机构
B、连杆机构
C、杠杆结构
D、轮传动
解析:【喵呜刷题小喵解析】:棘轮机构是一种单向传动的机构,它只允许机械尺蠖向一个方向移动,而阻止其反向移动。这种机构在需要单向运动控制的应用中非常有用。因此,为了制作一个只能向一个方向移动的机械尺蠖,我们需要棘轮机构。
25、平行啮合的两个齿轮,大齿轮和小齿轮的周长比是5:2,则大齿轮和小齿轮的齿数比是?
A、2:5
B、5:4
C、4:25
D、5:2
解析:【喵呜刷题小喵解析】齿轮的周长比等于齿数比,因为齿轮的周长等于齿数乘以模数,而模数对于两个齿轮是相同的。所以,大齿轮和小齿轮的周长比是5:2,那么齿数比也是5:2。因此,正确答案是D选项,即大齿轮和小齿轮的齿数比是5:2。
26、以下装置中,动力传递会产生延迟的是哪个?
A、皮带传动
B、齿轮传动
C、链条传动
D、曲柄连杆
解析:【喵呜刷题小喵解析】:皮带传动是通过皮带将动力从一个轮传递到另一个轮,由于皮带的弹性,当动力传递时会产生一定的延迟。齿轮传动、链条传动和曲柄连杆都是刚性连接,动力传递几乎没有延迟。因此,动力传递会产生延迟的是皮带传动,答案为A。
27、以下哪项不属于皮带传动的特点?
A、结构简单
B、传动平稳
C、能缓冲吸振
D、只能近距离传动
解析:【喵呜刷题小喵解析】:皮带传动是一种常用的机械传动方式,其主要特点包括:结构简单、传动平稳和能缓冲吸振。而“只能近距离传动”并不是皮带传动的特点。实际上,皮带传动可以在较远的距离内实现动力的传递,因此选项D“只能近距离传动”不属于皮带传动的特点。
28、链传动中主动轮24齿,从动轮12齿,传动比是多少?
A、2:1
B、1:1
C、1:2
D、4:1
解析:【喵呜刷题小喵解析】链传动的传动比是主动轮齿数与从动轮齿数的比值,即传动比=主动轮齿数/从动轮齿数。题目中主动轮有24齿,从动轮有12齿,所以传动比=24/12=2:1。因此,正确答案为C,即传动比是1:2。
29、链传动相比齿轮传动的优点是?
A、可以在两轴中心相距较远的情况下传递运动和动力
B、提高转速
C、增加动力
D、没有优点
解析:【喵呜刷题小喵解析】:链传动相比齿轮传动,其优点是可以在两轴中心相距较远的情况下传递运动和动力。这是因为链条可以绕过较大的距离,而齿轮则需要在两轴中心距离较近的情况下才能传递运动和动力。因此,选项A是正确的。选项B、C、D都是不正确的,因为链传动并不能提高转速、增加动力,也不能说它没有优点。
30、如图,关于该传动方式说法正确的是?
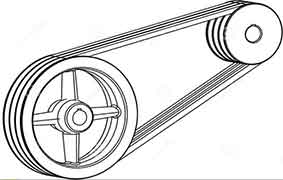
A、这是皮带平行传动
B、这是皮带交叉传动
C、这是皮带半交叉传动
D、这是链传动
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到皮带是平行传动的,因此选项A“这是皮带平行传动”是正确的。选项B“这是皮带交叉传动”、选项C“这是皮带半交叉传动”和选项D“这是链传动”均不正确。
二、多选题
31、关于重力说法正确的有?
A、方向竖直向下
B、方向竖直向上
C、所有物体重力都一样大
D、静止的物体也有重力
解析:【喵呜刷题小喵解析】:A选项正确,重力的方向总是竖直向下。这是由地球的吸引作用决定的,与物体的运动状态无关。B选项错误,重力的方向是竖直向下,而不是竖直向上。C选项错误,所有物体重力的大小并不都一样大。重力的大小与物体的质量成正比,质量大的物体受到的重力也大。D选项正确,静止的物体也有重力。重力是地球对物体的吸引作用,与物体是否运动无关。无论是静止还是运动的物体,都会受到重力的作用。
32、如图,向两张纸中间吹风,说法正确的是?
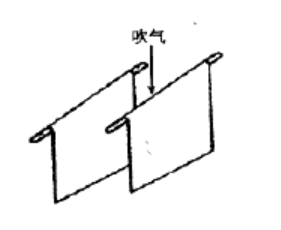
A、两张纸向外分离
B、两张纸向中间并拢
C、吹的越快两张纸并拢越近
D、吹的越快两张纸分离越远
解析:【喵呜刷题小喵解析】:根据流体动力学原理,当向两张纸中间吹风时,空气流速加快,导致两张纸中间的压强降低。由于两侧的大气压强相等,外侧的大气压强会推动两张纸向中间并拢。而且,吹得越快,空气流速越快,压强降低越明显,两张纸并拢的距离也会越近。因此,选项B和选项C是正确的。选项A和选项D与实验结果不符,是错误的。
33、以下哪些机构是间歇运动机构?
A、槽轮机构
B、棘轮机构
C、完全齿轮机构
D、不完全齿轮机构
解析:【喵呜刷题小喵解析】:间歇运动机构是指在运动过程中,其输出件的运动是时停时转的机构。A槽轮机构、B棘轮机构以及D不完全齿轮机构都是间歇运动机构。C完全齿轮机构则是连续旋转的机构,因此不是间歇运动机构。所以,间歇运动机构包括A槽轮机构、B棘轮机构、D不完全齿轮机构。
34、凸轮机构一般包括以下哪些部分?
A、凸轮
B、从动件
C、机架
D、棘爪
解析:【喵呜刷题小喵解析】:根据题目要求,我们需要找出凸轮机构一般包括的部分。在给出的选项中,凸轮机构一般包括凸轮、从动件和机架。棘爪并不是凸轮机构的一般组成部分,因此不应被选中。因此,正确答案为{ABC}。
35、链传动和皮带平行传动的共同点有?
A、适合远距离传动
B、链轮或者带轮的转向都相同
C、都适合近距离传动
D、都能准确无误的传递动力
解析:【喵呜刷题小喵解析】:链传动和皮带平行传动都是利用链轮或带轮来传递动力,因此它们具有一些共同点。首先,它们都可以用于远距离传动,因此选项A是正确的。其次,链轮或带轮的转向都相同,因为它们是围绕同一轴线旋转的,所以选项B也是正确的。选项C和D并不适用于两种传动方式,因此它们不是正确答案。链传动和皮带传动在近距离传动方面并没有明显的优劣之分,因此选项C是不正确的。同样,它们也不能保证准确无误地传递动力,因为在实际应用中,可能会出现打滑、磨损等问题,因此选项D也是不正确的。
三、判断题
36、工业机器人是能够自动执行任务的人造机器装置,可以取代或协助人类工作。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:工业机器人是一种能够自动执行任务的人造机器装置,它可以取代或协助人类工作。这是工业机器人的基本定义,因此题目中的陈述是正确的。所以,答案为A。
37、谢克机器人(ShakeTheRobot)是世界上第一台移动机器人。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:根据题目给出的信息,谢克机器人(ShakeTheRobot)被描述为“世界上第一台移动机器人”。因此,根据这个描述,我们可以判断该说法是正确的。所以,答案为A。
38、生物能也是机器人的能力评价标准。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:题目中的观点是“生物能也是机器人的能力评价标准”。生物能,通常是指利用生物质作为燃料,将其转化为能量的过程,例如生物质发电、生物质燃料等。而机器人,则是一种能够自动或半自动执行特定任务的机器系统。生物能与机器人的能力评价标准之间并没有直接的联系。机器人的能力评价标准通常包括其智能水平、动作准确性、反应速度、负载能力等方面,并不涉及生物能。因此,生物能不是机器人的能力评价标准,题目中的观点是错误的。所以,答案选择B。
39、伯努利定理是飞机起飞的主要原理之一。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:伯努利定理指出,当流体流动时,流速大的地方压强小,流速小的地方压强大。飞机在跑道上加速时,机翼上方的空气流速增大,压强减小,机翼下方的空气流速相对较小,压强相对较大,由此产生向上的升力,使飞机得以起飞。因此,伯努利定理确实是飞机起飞的主要原理之一。所以,选项A正确。
40、凸轮的轮廓曲线和运动周期决定从动杆的运动规律。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:题目的说法是正确的。凸轮的轮廓曲线决定了从动杆的运动轨迹,而运动周期则决定了从动杆的运动速度和加速度的变化规律。因此,凸轮的轮廓曲线和运动周期共同决定了从动杆的运动规律。所以,选项A“正确”是正确的答案。
41、步行机器人的行走机构多为连杆机构。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:步行机器人的行走机构确实多为连杆机构。连杆机构是一种通过一系列杆件连接而成的机构,通过杆件之间的相对运动来实现特定的运动轨迹或动作。在步行机器人中,连杆机构被用来模拟人类的步行动作,通过连杆的伸缩和旋转,实现机器人行走的稳定性和灵活性。因此,题目中的陈述是正确的。
42、差速转向是由速度差而产生转向的方式。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:差速转向是一种转向方式,其原理是通过左右车轮的转速差来实现转向。当车辆转弯时,外侧车轮需要比内侧车轮行驶更长的距离,因此外侧车轮的转速会更快。这种转速差会导致车辆向转弯的方向偏移,从而实现转向。因此,差速转向确实是由速度差而产生转向的方式,所以答案为A,正确。
43、曲柄滑块机构可以将圆周运动转换成直线往复运动。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:曲柄滑块机构是一种常用的机械装置,它可以将圆周运动转换成直线往复运动。因此,题目中的陈述是正确的。
44、大齿轮带动小齿轮为加速装置。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:大齿轮带动小齿轮为加速装置的说法是正确的。这是因为当大齿轮带动小齿轮旋转时,小齿轮的转速会比大齿轮的转速快。这是因为齿轮的转速与齿轮的直径成反比,大齿轮的直径大,所以转速慢,而小齿轮的直径小,所以转速快。因此,大齿轮带动小齿轮实际上是一个加速装置,故本题选A。
45、皮带传动除传递动力外,还可应用于物料输送、分拣。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:皮带传动是一种利用皮带作为中间挠性件,在闭式传动中连续传递运动和动力的机械传动。除了传递动力外,皮带传动还常用于物料输送和分拣。这是因为皮带具有一定的挠性和弹性,能够承载并输送物料,同时皮带传动装置的结构简单、维护方便,因此在物料输送和分拣等领域得到广泛应用。因此,题目中的说法是正确的。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




