



一、单选题
1、诸葛亮制造的木牛流马的作用是?
A、灌溉农田
B、运输军粮
C、测量行驶距离
D、观测天象
解析:【喵呜刷题小喵解析】:木牛流马是古代中国三国时期蜀汉丞相诸葛亮发明的运输工具,用于在山地等险峻地带进行军事粮草的运输。因此,选项nB“运输军粮”是正确的答案。其他选项如灌溉农田、测量行驶距离和观测天象,与木牛流马的实际作用不符。
2、世界上最早的工业机器人诞生于?
A、美国
B、中国
C、俄罗斯
D、德国
解析:【喵呜刷题小喵解析】:世界上最早的工业机器人诞生于美国。1996年伊莱克斯公司制造出了三叶形(Trilobite)机器人吸尘器三叶虫(Trilobite),这是世界上第一台扫地机器人,也是世界上第一台扫地机器人。而三叶虫(Trilobite)是古生物化石,生活于距今5.7亿至5.1亿年前的寒武纪。因此,三叶形(Trilobite)机器人吸尘器三叶虫(Trilobite)是世界上最早的工业机器人,诞生于美国。所以,正确答案是A,美国。
3、“恐怖谷理论”是指?
A、机器人对人有恐惧心理
B、人对所有机器人都有恐惧心理
C、机器人外形太过于像人会让人觉得恐怖
D、大量机器人让人觉得恐怖
解析:【喵呜刷题小喵解析】恐怖谷理论是由日本机器人专家伊莱克斯·森昌弘在1970年提出的,其核心观点是当机器人(或者其它人造物体)在外形、动作、表情等方面与人类非常相似,但又不是完全相同时,人们会对其产生强烈的恐惧和不安。这种心理现象被称为“恐怖谷效应”。因此,选项C“机器人外形太过于像人会让人觉得恐怖”是恐怖谷理论的准确描述。选项A“机器人对人有恐惧心理”与理论不符,因为理论讨论的是人对机器人的恐惧心理;选项B“人对所有机器人都有恐惧心理”过于绝对,不是恐怖谷理论的核心观点;选项D“大量机器人让人觉得恐怖”没有明确指出是因为机器人与人类的相似性引起的恐惧,因此也不符合恐怖谷理论。
4、“公输子削木为雀”是关于( )的记载。
A、家用机器人
B、军用机器人
C、空中机器人
D、水下机器人
解析:【喵呜刷题小喵解析】“公输子削木为雀”是关于空中机器人的记载。公输子,即公输班,是春秋时期的著名工匠,擅长制作各种器械,尤其擅长木工。削木为雀,意味着用木头制作成鸟的形状,这种形状类似现代的无人机或纸飞机,可以在空中飞行。因此,这个记载与空中机器人最为相关。其他选项如家用机器人、军用机器人和水下机器人与这个记载没有直接关联。
5、中国家用电压为?
A、22V
B、50V
C、110V
D、220V
解析:【喵呜刷题小喵解析】:在中国,家用电的电压通常为220V。这是基于中国电力系统的标准电压。因此,正确答案为D选项,即220V。其他选项如22V、50V和110V都不是中国家用电的标准电压。
6、飞机可以飞上天空主要是因为?
A、起飞时机翼下方气压比上方气压大
B、起飞时机翼上方气压比下方气压大
C、飞机外形像鸟
D、飞机机身不重
解析:【喵呜刷题小喵解析】飞机可以飞上天空主要是因为起飞时机翼下方气压比上方气压大。当飞机在起飞时,机翼上方的空气流速较快,压力较低,而机翼下方的空气流速较慢,压力较高。这种压力差使得飞机获得升力,从而能够飞上天空。因此,选项A“起飞时机翼下方气压比上方气压大”是正确的答案。选项B“起飞时机翼上方气压比下方气压大”是错误的,因为实际情况是机翼上方气压比下方气压低。选项C“飞机外形像鸟”与飞机的飞行原理无关,飞机并不是因为外形像鸟而能够飞行。选项D“飞机机身不重”也不是飞机能够飞行的主要原因,飞机的升力与其重量无关,而是与机翼的形状和空气流速有关。
7、关于电动机能量转化说法正确的是?
A、电能转化为机械能
B、动能转化为势能
C、势能转化为动能
D、机械能转化为电能
解析:【喵呜刷题小喵解析】电动机是将电能转化为机械能的装置。在电动机工作时,通过电磁感应或磁场作用,输入的电能被转化为机械能,从而驱动机械部件运动。因此,选项A“电能转化为机械能”是正确的说法。选项B、C、D中的动能、势能、机械能与电能的转化与电动机的工作原理不符,因此是错误的。
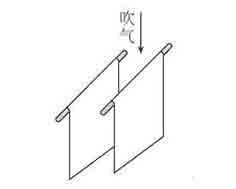
8、如图,像两张纸中间吹起,两张纸会怎么变化?
A、两张纸相互分离
B、两张纸相互吸引
C、没有变化
D、纸张颜色变化
解析:【喵呜刷题小喵解析】:当在两张纸中间吹气时,气流会在两张纸之间形成一股压力差。由于纸张是轻质材料,这种压力差会使纸张受到向内的力,从而导致两张纸相互靠近,而不是分离。因此,正确答案是“两张纸相互吸引”。
9、关于摩擦力说法正确的是?
A、滑动摩擦力跟物体接触面粗糙程度无关
B、滚动摩擦力一般都比较大
C、只有相互接触的物体之间才可能产生摩擦
D、摩擦力的方向一定与物体运动方向相同
解析:【喵呜刷题小喵解析】滑动摩擦力与接触面的粗糙程度有关,故A错误;滚动摩擦力一般比滑动摩擦力小,故B错误;摩擦力的产生条件:接触面粗糙,接触且挤压,有相对运动或相对运动的趋势,故C正确;摩擦力的方向总是与物体相对运动或相对运动趋势的方向相反,不一定与物体运动方向相同,故D错误。故选C。
10、以下是后轮驱动优点的是?
A、可以增加内部空间
B、能够减轻车身重量
C、造价更低
D、操控性好,起步加速表现好
解析:【喵呜刷题小喵解析】后轮驱动优点主要体现在对车辆的操控性和起步加速表现上。后轮驱动的车辆在操控上更加稳定,因为驱动轮和承重轮是分开的,这使得转向更加精确。同时,后轮驱动的车辆在起步和加速时,由于重心后移,可以获得更好的牵引力,表现更出色。A选项“可以增加内部空间”并不是后轮驱动的优点。车辆的内部空间主要取决于车辆的设计和制造,与驱动方式无直接关系。B选项“能够减轻车身重量”也不是后轮驱动的优点。车身重量主要取决于车辆的材料和制造工艺,与驱动方式无直接关系。C选项“造价更低”同样不是后轮驱动的优点。车辆的造价受到多种因素的影响,包括材料、工艺、制造成本等,与驱动方式无直接关系。因此,正确答案是D选项“操控性好,起步加速表现好”。
11、关于差速运动控制说法正确的是?
A、是我们用来调整机器人转向的常用方法
B、只能适用于机械小车
C、是指机器人两侧“脚”的运动快慢一样的时候,他可以转向
D、机器人“左脚电机”转速比“右脚电机”快时,机器人会原地不动。
解析:【喵呜刷题小喵解析】:差速运动控制是机器人转向的一种常用方法,通过调整两侧“脚”的转速来实现转向。因此,选项A“是我们用来调整机器人转向的常用方法”是正确的。选项B“只能适用于机械小车”是错误的,差速运动控制不仅仅适用于机械小车,也适用于其他类型的机器人。选项C“是指机器人两侧‘脚’的运动快慢一样的时候,他可以转向”也是错误的,差速运动控制是通过调整两侧“脚”的转速来实现转向的,而不是让两侧“脚”的运动快慢一样。选项D“机器人‘左脚电机’转速比‘右脚电机’快时,机器人会原地不动”也是错误的,差速运动控制中,当机器人“左脚电机”转速比“右脚电机”快时,机器人会向右转,而不是原地不动。
12、汽车车轮上都有很深的花纹主要目的是?
A、美观
B、行驶时增大与地面的摩擦力
C、更容易生产
D、能够减小车轮重量
解析:【喵呜刷题小喵解析】:汽车车轮上都有很深的花纹,这是为了增大与地面的摩擦力,以防止在行驶过程中发生打滑现象,保证行车安全。因此,答案为nB。其他选项如美观、更容易生产、能够减小车轮重量等都不是车轮上花纹的主要目的。
13、机械尺蠖只能往前走不能后退,是因为它安装了( )。
A、棘轮机构
B、凸轮机构
C、槽轮机构
D、滑轮
解析:【喵呜刷题小喵解析】棘轮机构通常由棘轮和棘爪组成,棘轮上沿圆周均匀分布若干棘齿,棘爪则可以与棘齿啮合或脱离。当棘爪向前推动棘轮时,棘轮上的棘齿会阻止棘轮后退,因此棘轮机构常用于只允许一个方向转动的场合。机械尺蠖只能往前走不能后退,正是利用了棘轮机构的特点。因此,答案为A。
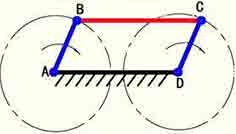
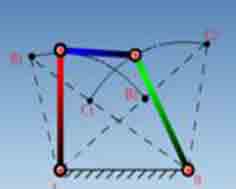
14、如图该机构是一个?
A、曲柄摇杆机构
B、曲柄滑块机构
C、反向双曲柄机构
D、平行双曲柄机构
解析:【喵呜刷题小喵解析】:根据题目中给出的图片,我们可以观察到这是一个由两个曲柄构成的机构。在机构学中,当两个曲柄的转动轴线平行时,我们称之为平行双曲柄机构。因此,根据这个图片,我们可以确定该机构是平行双曲柄机构,选项D是正确的。
15、如图棘轮机构的特征是?

A、传动平稳,噪音小
B、传动时精度高于齿式棘轮
C、能节省机械机构占用的空间
D、动作没有规律
解析:【喵呜刷题小喵解析】:棘轮机构的主要特征在于其传动平稳,噪音小。棘轮机构是一种通过棘轮和棘爪的啮合来实现间歇运动的机构,这种啮合方式相对平滑,减少了机械冲击和噪音。因此,选项A“传动平稳,噪音小”是正确的。选项B“传动时精度高于齿式棘轮”虽然可能在某些情况下正确,但棘轮机构与齿式棘轮在精度上并没有明显的优劣之分,因此不能作为棘轮机构的特征。选项C“能节省机械机构占用的空间”虽然棘轮机构在某些设计中可能有助于节省空间,但这并不是其主要的特征。选项D“动作没有规律”与棘轮机构的实际工作原理相悖。棘轮机构是一种间歇运动的机构,其动作是有规律的,即棘爪与棘轮的啮合是周期性的。因此,选项D是错误的。
16、如图,关于该机构说法正确的是?
A、它是外啮合棘轮机构
B、棘爪在棘轮的外侧
C、它是内啮合棘轮机构
D、它是齿式棘轮机构
解析:【喵呜刷题小喵解析】根据棘轮机构的工作原理,棘轮机构是由棘轮和棘爪组成,棘轮上分布有棘齿,棘爪在棘轮的内侧,当棘爪与棘轮上的棘齿啮合时,棘轮会停止转动,当棘爪与棘轮上的棘齿脱离时,棘轮会转动。因此,该机构是内啮合棘轮机构,选项C正确。选项A错误,因为该机构是内啮合棘轮机构,不是外啮合棘轮机构。选项B错误,因为棘爪在棘轮的内侧,不是外侧。选项D错误,该机构是棘轮机构,但不是齿式棘轮机构。
17、我们在用鱼线轮回收鱼线时,松开手鱼线也不会被拉出,是因为?
A、鱼线被卡死了,不能动
B、因为水里的鱼也不动
C、鱼线用完了
D、线轮上有棘轮,阻止了一个方向的转动
解析:【喵呜刷题小喵解析】鱼线轮回收鱼线时,松开手鱼线不会被拉出,这是因为线轮上有棘轮机构,阻止了线轮在一个方向上的转动。这种棘轮机构可以防止鱼线在松开手后继续被拉出,从而保证收线的安全性。选项A“鱼线被卡死了,不能动”、选项B“因为水里的鱼也不动”和选项C“鱼线用完了”都不符合鱼线轮的工作原理和实际情况,因此可以排除。因此,正确答案是D,即线轮上有棘轮,阻止了一个方向的转动。
18、如图,该机构为?
A、曲柄摇杆机构
B、曲柄滑块机构
C、双摇杆机构
D、双曲柄机构
解析:【喵呜刷题小喵解析】:根据提供的图片,该机构中有一根曲柄和一根滑块,符合曲柄滑块机构的特征。曲柄滑块机构是由曲柄和滑块通过连杆连接而成的机构,其中曲柄做圆周运动,滑块做直线运动。因此,该机构为曲柄滑块机构,选项B正确。
19、如图,双摇杆机构的动作特征为?
A、左右两杆做圆周运动
B、左侧杆做圆周运动,右侧杆做摇摆运动
C、左侧杆做摇摆运动,右侧杆做圆周运动
D、左右两杆都做摇摆运动
解析:【喵呜刷题小喵解析】:双摇杆机构由两根杆件组成,这两根杆件都围绕固定点做摇摆运动,而不是做圆周运动。因此,正确答案是左右两杆都做摇摆运动,即选项D。
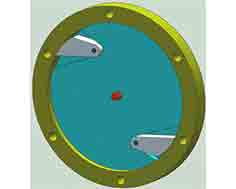
20、如图,哪个属于圆柱凸轮机构?
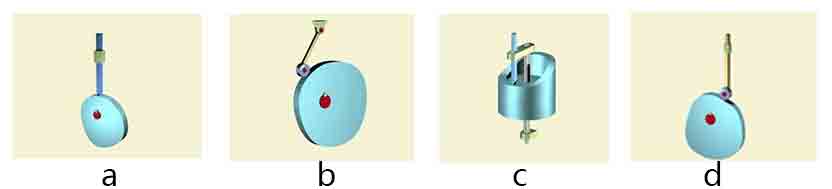
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以观察到四个不同的机构。其中,选项C所示机构具有圆柱形的凸轮,符合圆柱凸轮机构的特征。因此,正确答案是C。
21、以下哪项是平底从动件凸轮机构特征?
A、凸轮只能是外凸的
B、凸轮只能是内凹的
C、凸轮的形状没有限制
D、凸轮必须是圆柱凸轮
解析:【喵呜刷题小喵解析】:平底从动件凸轮机构中,凸轮的轮廓与平底从动件接触,因此凸轮的轮廓必须是外凸的,以提供足够的支撑和导向作用。选项A“凸轮只能是外凸的”符合平底从动件凸轮机构的特征。选项B“凸轮只能是内凹的”与平底从动件凸轮机构的特征相反,不正确。选项C“凸轮的形状没有限制”虽然理论上正确,但在平底从动件凸轮机构中,凸轮的轮廓必须是外凸的,因此也不正确。选项D“凸轮必须是圆柱凸轮”没有特定于平底从动件凸轮机构的特征,因此也不正确。因此,正确答案是A。
22、以下关于凸轮机构说法正确的是?
A、凸轮旋转周期对从动件运动周期没影响
B、凸轮机构中凸轮必须是椭圆盘形
C、凸轮轮廓曲线对从动件运动规律有影响
D、凸轮机构中凸轮必须是圆柱体
解析:【喵呜刷题小喵解析】:对于凸轮机构,以下是对各选项的分析:A选项:凸轮的旋转周期对从动件运动周期没影响。实际上,凸轮的旋转周期会直接影响到从动件的运动周期。因此,A选项是错误的。B选项:凸轮机构中凸轮必须是椭圆盘形。凸轮的形状并不一定是椭圆盘形,可以是多种形状,如圆形、三角形等。因此,B选项也是错误的。C选项:凸轮轮廓曲线对从动件运动规律有影响。这是正确的。凸轮的轮廓曲线决定了从动件的运动规律,不同的轮廓曲线会导致不同的运动规律。D选项:凸轮机构中凸轮必须是圆柱体。凸轮的形状并不一定是圆柱体,可以是多种形状,如平面、曲面等。因此,D选项是错误的。综上所述,只有C选项是正确的。
23、汽车的转向装置一般会用到?
A、连杆机构
B、杠杆
C、滑轮
D、棘轮
解析:【喵呜刷题小喵解析】:汽车的转向装置需要实现转向轮相对于车身的转动,而连杆机构是实现这种转动的一种有效方式。连杆机构通过一系列杆件的连接和运动,将驾驶员的转向操作转化为车轮的转动。因此,汽车的转向装置一般会用到连杆机构。选项B杠杆、选项C滑轮和选项D棘轮虽然都是机械装置中的常见元素,但它们在汽车转向装置中的应用并不常见。因此,正确答案为A选项。
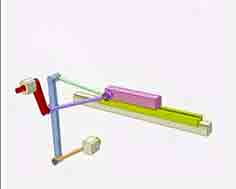
24、如图,该机械结构各部分动作说法正确的是?
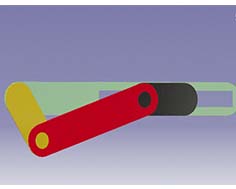
A、曲柄做摇摆运动
B、曲柄做圆周运动
C、连杆做圆周运动
D、滑块做圆周运动
解析:【喵呜刷题小喵解析】:根据题目中的机械结构图,我们可以看到曲柄与固定点连接,并在一个圆周内做运动。这种运动形式与圆周运动的特点相符,即物体在固定点围绕一个中心点做等半径的旋转运动。因此,选项B“曲柄做圆周运动”是正确的。选项A“曲柄做摇摆运动”并不准确,因为曲柄的运动轨迹并不是摇摆的,而是围绕固定点做圆周运动。选项C“连杆做圆周运动”和选项D“滑块做圆周运动”在图中没有明确的证据支持,因此不正确。
25、下列机构中属于棘轮机构的是?
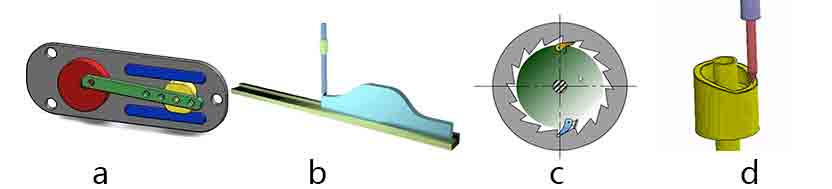
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】棘轮机构是一种常用的间歇运动机构,由棘轮和棘爪组成。棘轮上沿圆周均匀分布若干棘齿,棘爪在棘轮的一侧或两侧,当棘爪作单向间歇运动时,棘轮作同向的间歇转动。棘轮机构中,棘轮和棘爪是主要的组成部分,棘轮上沿圆周均匀分布若干棘齿,棘爪在棘轮的一侧或两侧,当棘爪作单向间歇运动时,棘轮作同向的间歇转动。题目中给出的选项对应的图形中,只有选项C显示出棘轮和棘爪的结构,因此选项C是棘轮机构。
26、如图,挖掘机的手臂应用的机械结构是?

A、棘轮机构
B、凸轮机构
C、曲柄滑块机构
D、连杆机构
解析:【喵呜刷题小喵解析】:从图片中我们可以看到,挖掘机的手臂呈现出一种可以弯曲和伸展的结构,这种结构正是连杆机构的特点。连杆机构由一系列的连杆组成,通过改变各连杆的长度或相对位置,可以实现复杂的运动。在挖掘机的手臂中,连杆机构允许手臂进行弯曲和伸展,从而适应不同的挖掘需求。因此,正确答案是D选项,即连杆机构。
27、以下是皮带传动优点的是?
A、适合远距离传动
B、传递动力准确无误
C、结构紧凑
D、噪音大
解析:【喵呜刷题小喵解析】:皮带传动是一种利用皮带将动力从一个轴传递到另一个轴的传动方式。皮带传动的优点包括:A. 适合远距离传动:皮带传动可以通过皮带的长度来实现远距离的传动,因此适用于需要长距离传动的场合。B. 传递动力准确无误:皮带传动并不能保证动力传递的准确无误,因为皮带在传递过程中可能会出现打滑、松弛等问题,导致动力传递不准确。C. 结构紧凑:皮带传动的结构相对简单,占用空间较小,因此可以应用于空间有限的场合。D. 噪音大:皮带传动在传递过程中会产生一定的噪音,因此不适用于需要低噪音的场合。因此,皮带传动的优点中,适合远距离传动是其主要优点之一。所以,正确答案是A。
28、关于传动方式说法正确的是?
A、齿轮平行啮合,齿轮转动方向相同
B、皮带平行传动,带轮转向相反
C、皮带平行传动,带轮转向相同
D、链传动,链轮转向相反
解析:【喵呜刷题小喵解析】齿轮平行啮合时,齿轮的转动方向相同,所以选项A正确。皮带平行传动时,带轮的转向相同,所以选项B错误,选项C正确。链传动时,链轮的转向相同,所以选项D错误。因此,正确答案是C。
29、如图,哪个是齿轮传动?

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】齿轮传动是一种通过齿轮之间的啮合来传递动力或运动的机械装置。在提供的图片中,齿轮传动的特征是两个齿轮通过齿的啮合来传递动力。观察选项中的图片,只有选项C中的两个齿轮有明显的啮合,符合齿轮传动的特征。因此,正确答案是C。
30、以下关于皮带交叉传动说法正确的是?
A、两带轮转向相同
B、两带轮转向相反
C、带轮转向关系不能确定
D、是指带轮旋转中心轴交叉
解析:【喵呜刷题小喵解析】:皮带交叉传动是指两个带轮通过皮带进行传动,且两个带轮的旋转中心轴是交叉的。在这种传动方式中,两带轮的转向是相反的。因此,正确答案是B选项,即两带轮转向相反。A选项错误,因为两带轮的转向是相同的;C选项错误,因为带轮的转向关系是可以确定的;D选项错误,皮带交叉传动并不是指带轮旋转中心轴交叉,而是指两个带轮的旋转中心轴是交叉的。
二、多选题
31、如图物体受到的力有哪些?

A、重力
B、支持力
C、弹力
D、摩擦力
解析:【喵呜刷题小喵解析】本题考察的是对物体受力情况的分析。根据题目中的图片,我们可以观察到物体处于静止状态,且只与地面接触。首先,由于物体处于地球表面,因此会受到地球对它的引力,也就是重力。其次,物体与地面接触,地面会对物体施加一个垂直于接触面的力,这个力就是支持力。最后,由于物体处于静止状态,它不会相对于地面有滑动或滚动的趋势,因此不会受到摩擦力。但是,如果物体受到一个水平的外力作用,而这个外力小于地面给物体的最大静摩擦力,那么物体将受到静摩擦力的作用。综上所述,物体受到的力有重力、支持力和静摩擦力(如果存在的话)。因此,正确选项是A(重力)、B(支持力)和D(摩擦力)。至于选项C(弹力),在题目中并没有明确提到,且弹力通常是由于物体发生弹性形变而产生的,而在这个问题中并没有提到物体发生弹性形变,因此弹力不是物体受到的力。
32、关于重力说法正确的有?
A、方向竖直向下
B、所有物体重力都一样大
C、一个小朋友比一个苹果受到的重力大
D、静止的物体没有重力
解析:【喵呜刷题小喵解析】:选项A:方向竖直向下,这是正确的。重力的方向总是竖直向下,与物体的形状、大小、运动状态无关。选项B:所有物体重力都一样大,这是错误的。重力的大小与物体的质量成正比,不同质量的物体受到的重力是不同的。选项C:一个小朋友比一个苹果受到的重力大,这是正确的。小朋友的质量通常比苹果大,因此受到的重力也更大。选项D:静止的物体没有重力,这是错误的。重力是地球对物体产生的吸引力,与物体是否静止无关。无论物体是静止还是运动,都会受到重力的作用。
33、以下属于间歇运动机构的有?
A、凸轮机构
B、棘轮机构
C、不完全齿轮机构
D、双摇杆机构
解析:【喵呜刷题小喵解析】:间歇运动机构是一种运动规律呈周期性停止和运动的机构,主要有棘轮机构、不完全齿轮机构和凸轮机构。因此,选项{A}凸轮机构、{B}棘轮机构、{C}不完全齿轮机构都是间歇运动机构,而{D}双摇杆机构则不是间歇运动机构,它是连续运动机构。所以,正确答案为{A}、{B}、{C}。
34、关于皮带传动说法正确的是?
A、火车站的安检处利用皮带传动来运行李
B、皮带传动时,皮带轮的转向一定是相反的
C、皮带传动时,皮带轮的转向一定是相同的
D、皮带平行传动,两带轮转向相同,皮带交叉传动,两带轮转向相反
解析:【喵呜刷题小喵解析】:对于皮带传动,当皮带平行传动时,两带轮的转向是相同的;而当皮带交叉传动时,两带轮的转向是相反的。因此,选项D是正确的。至于选项A,火车站的安检处确实利用皮带传动来运行李,这也是皮带传动在实际生活中的应用之一,所以选项A也是正确的。选项B和C都是关于皮带轮转向的陈述,但它们的描述都是绝对的。实际上,皮带传动时,皮带轮的转向并不一定是相反的,也不一定是相同的,这取决于皮带的传动方式和布局。因此,选项B和C都是错误的。
35、链传动和皮带平行传动的共同点有?
A、适合远距离传动
B、链轮或者带轮的转向都相同
C、都适合近距离传动
D、都能准确无误的传递动力
解析:【喵呜刷题小喵解析】:链传动和皮带平行传动都是利用链轮或带轮来传递动力,因此它们具有一些共同点。首先,它们都可以用于远距离传动,因此选项A是正确的。其次,链轮或带轮的转向都相同,因为它们是围绕同一轴线旋转的,所以选项B也是正确的。选项C和D并不适用于两种传动方式,因此它们不是正确答案。链传动和皮带传动在近距离传动方面并没有明显的优劣之分,因此选项C是不正确的。同样,它们也不能保证准确无误地传递动力,因为在实际应用中,可能会出现打滑、磨损等问题,因此选项D也是不正确的。
三、判断题
36、机器人三大定律中指出机器人必须具备人形。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:机器人三大定律是科幻作家艾萨克·阿西莫夫提出的,包括第一定律:机器人不得伤害人类,或因不作为而让人类受到伤害;第二定律:机器人必须服从人类的命令,除非这些命令与第一定律相冲突;第三定律:机器人必须保护自己,只要这种保护不与第一定律或第二定律相冲突。这三大定律中并没有提到机器人必须具备人形。因此,题目中的说法是错误的。
37、物体表面气流速度越快,它受到的气压越小。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:根据伯努利方程,当流体(如空气)流动时,流速增加,压强减小。因此,当物体表面的气流速度越快时,该表面受到的气压越小。这一说法是正确的。所以,选项A是正确的。
38、两个物体不用相互接触,只要有相对移动就能产生摩擦力。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:本题考查的是摩擦力的产生条件。摩擦力是两个相互接触的物体之间,当它们有相对运动或相对运动趋势时,在接触面上产生的一种阻碍相对运动的力。因此,两个物体要产生摩擦力,必须相互接触,并且要有相对运动或相对运动趋势。所以,题目中的说法“两个物体不用相互接触,只要有相对移动就能产生摩擦力”是错误的。因此,正确答案是B。
39、物体的滚动摩擦力一般都大于滑动摩擦力的大小。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:物体的滚动摩擦力一般小于滑动摩擦力的大小。在接触面相同的情况下,滚动摩擦比滑动摩擦要小,因此,说物体的滚动摩擦力一般都大于滑动摩擦力的大小是错误的。因此,答案是B。
40、曲柄滑块机构中曲柄做的是按设定的轨道来回移动。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:曲柄滑块机构中,曲柄并不是按照设定的轨道来回移动,而是绕固定轴做圆周运动。滑块则沿着设定的直线轨道往复移动。因此,题目中的说法是错误的。
41、所有凸轮都必须是外凸的,不能是内凹的。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:题目中的说法“所有凸轮都必须是外凸的,不能是内凹的”是不准确的。凸轮可以是外凸的,也可以是内凹的,这取决于具体的设计和应用需求。因此,该说法是错误的,答案为B。
42、凸轮机构中从动件的运动轨迹跟凸轮的轮廓曲线无关。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在凸轮机构中,从动件的运动轨迹是由凸轮的轮廓曲线决定的。当凸轮转动时,从动件会沿着凸轮的轮廓曲线进行运动,因此从动件的运动轨迹与凸轮的轮廓曲线密切相关。因此,该题目中的陈述是错误的。
43、所有棘轮机构只能向一个方向转动。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:棘轮机构是一种单向离合机构,其特点是在主动件向一个方向旋转时,从动件才能与主动件一起旋转,当主动件转向改变时,从动件便自动与主动件脱离。然而,棘轮机构的设计和应用中,有些棘轮机构是可以双向转动的,只是在一方向上转动时,棘轮和棘爪可以啮合,而在另一方向上转动时,棘轮和棘爪不啮合,从而起到单向锁定的作用。因此,说所有棘轮机构只能向一个方向转动是不准确的,所以答案是B,即错误。
44、不完全齿轮机构,棘轮机构,凸轮机构都是间歇运动机构。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:不完全齿轮机构、棘轮机构和凸轮机构都是间歇运动机构。间歇运动机构是指在运动过程中,其输出件相对于输入件存在停歇和周期性运动的机构。不完全齿轮机构是通过齿轮的某一部分齿与另一个齿轮啮合,实现间歇运动;棘轮机构则是通过棘轮和棘爪的相互作用,实现间歇运动;而凸轮机构则是通过凸轮的轮廓与从动件的接触,实现间歇运动。因此,题目中的陈述是正确的。
45、链传动时两个链轮的转动方向相反。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:链传动是指通过链条和链轮之间的相互作用来传递动力和运动的机构。在链传动中,链条绕过两个链轮,通过链轮上的齿与链条的啮合来传递动力。链轮的转动方向取决于链条的绕行方向,而不是两个链轮的转动方向相反。因此,题目中的说法是错误的。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




