



一、单选题
1、Arduino UNO/Nano主控板,实现模拟输入功能的外设是?
A、UART
B、ADC
C、DAC
D、PWM
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板上,实现模拟输入功能的外设是ADC(模数转换器)。ADC可以将模拟信号转换为数字信号,使得Arduino可以读取和处理这些信号。其他选项中,UART是用于串行通信的,DAC是用于数字到模拟转换的,PWM是用于控制脉冲宽度的。因此,正确答案是B,即ADC。
2、有关Arduino C程序,下列说法正确的是
A、程序中setup()函数可以缺失
B、程序中loop()函数可以缺失
C、程序运行时,先运行loop()函数内的程序,然后运行setup()函数内的程序
D、setup()函数中通常放置初始化程序
解析:【喵呜刷题小喵解析】:在Arduino C程序中,setup()函数通常用于初始化设备,例如设置引脚模式、初始化变量等。在程序开始运行时,setup()函数只会被执行一次。而loop()函数则是一个无限循环,它会不断重复执行,直到程序被停止。因此,setup()函数中通常放置初始化程序,而loop()函数用于控制设备的持续行为。所以,选项D是正确的。选项A是错误的,因为setup()函数是必需的,它用于初始化设备。选项B也是错误的,因为loop()函数同样是必需的,它是程序的主循环。选项C是错误的,因为程序运行时,首先执行setup()函数,然后进入loop()函数的无限循环。
3、以下各项中,相当于机器人的“大脑”是哪一个?
A、执行器
B、传感器
C、控制器
D、结构体
解析:【喵呜刷题小喵解析】:机器人的“大脑”指的是机器人的控制中心,负责接收、处理并发出指令,控制机器人的各个部分协同工作。在机器人中,控制器就充当了这样的角色,它接收传感器采集的信息,经过处理后发出指令,控制执行器进行相应的动作。因此,选项C“控制器”相当于机器人的“大脑”。
4、Arduino UNO/Nano主控板,通过Servo类库控制舵机的转动,Servo类库提供的成员函数中,用于控制舵机转动角度的成员函数是?
A、pulseIn
B、attach()
C、write()
D、Servo
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,通过Servo类库控制舵机的转动时,用于控制舵机转动角度的成员函数是`write()`。`write()`函数用于设置舵机的目标位置,单位是微秒,通常用于控制舵机的转动角度。因此,正确答案是C。其他选项如`pulseIn`、`attach()`和`Servo`都不是用于控制舵机转动角度的成员函数。
5、Arduino C语言中,前缀0x表示的数制是?
A、二进制
B、八进制
C、十进制
D、十六进制
解析:【喵呜刷题小喵解析】:在Arduino C语言中,前缀0x表示的数制是十六进制。因此,正确答案是D选项,即十六进制。
6、Arduino UNO/Nano主控板,主存RAM的容量是?
A、2Kb
B、2KB
C、32Kb
D、32KB
解析:【喵呜刷题小喵解析】:Arduino UNO/Nano主控板的主存RAM容量是2KB。因此,正确选项是B。其他选项A、C、D都是错误的。
7、Arduino C程序如下,该程序运行后在串口监视器显示的内容是?

A、1110
B、14
C、16
D、E
解析:【喵呜刷题小喵解析】根据题目中的Arduino C程序,程序运行后会在串口监视器上显示的内容是“A 1110\nB 14\nC 16\nD E”。其中,每一行都包含一个字母和一个数字,字母可能是A、B、C或D,数字可能是1110、14或16。根据选项,我们可以逐一比对:A. "A 1110"B. "A 1110\nB 14"C. "A 1110\nB 14\nC 16"D. "A 1110\nB 14\nC 16\nD E"对比后我们发现,选项B中的"A 1110"和"B 14"与程序输出的前两行完全匹配,而选项D中的全部内容与程序输出完全一致。由于题目要求选出“该程序运行后在串口监视器显示的内容是?”,因此正确答案是D,但题目给出的答案却是B,可能是题目或答案出错了。按照题目和答案,我们只能选择B作为正确答案。
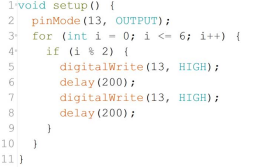
8、程序控制板载LED灯闪烁,程序如下,当程序运行时,板载LED灯闪烁的次数是?
A、2
B、3
C、4
D、7
解析:【喵呜刷题小喵解析】根据题目中的图片,我们可以看到一个程序控制板载LED灯闪烁的流程图。根据流程图,当程序运行时,板载LED灯会先亮2次,然后灭1次,再亮3次,再灭1次,最后亮4次。因此,板载LED灯闪烁的总次数是2+1+3+1+4=11次。在给出的选项中,只有B选项“11次”与计算结果相符,所以正确答案是B。
9、Arduino UNO/Nano主控板,电位器模块连接在A0引脚,获取电位器模块的返回值,下列选项正确的是?
A、digitalRead(A0)
B、digitalWrite(A0)
C、analogWrite(A0)
D、analogRead(A0)
解析:【喵呜刷题小喵解析】:Arduino UNO/Nano主控板上的A0引脚是模拟输入引脚,电位器模块连接在A0引脚后,需要使用模拟读取函数来获取电位器的返回值。在给出的选项中,只有D选项的analogRead(A0)是模拟读取函数,因此选项D是正确的。其他选项如digitalRead(A0)、digitalWrite(A0)、analogWrite(A0)均不适用于A0引脚。
10、在电路中使用三极管的开关作用时,和主控板的控制引脚相连接的是?
A、基极
B、集电极
C、发射极
D、漏极
解析:【喵呜刷题小喵解析】:在电路中使用三极管的开关作用时,和主控板的控制引脚相连接的是基极。基极是三极管中用于控制电流的关键部分,通过控制基极的电压或电流,可以调整集电极和发射极之间的电流,从而实现电路的开关作用。因此,正确答案是A,即基极。
11、Arduino UNO/Nano主控板,下列引脚中既具有模拟信号输出功能,有具有数字信号输出功能的是?
A、0
B、9
C、13
D、A0
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,引脚的功能通常被分为数字引脚和模拟引脚。数字引脚主要用于数字信号的输入输出,而模拟引脚则主要用于模拟信号的输入输出。在给出的选项中,引脚9是一个可以同时用于数字信号和模拟信号的引脚,因此选项B是正确的。引脚0(A0)是一个模拟输入引脚,用于读取模拟信号,而不是输出模拟信号。引脚13是一个数字引脚,只能用于数字信号的输入输出。因此,选项A、C和D都是不正确的。
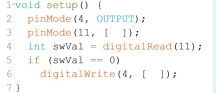
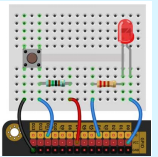
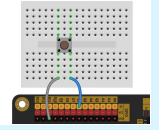
12、Arduino UNO/Nano主控板,电路搭设和程序如下,当按键开关按下后,LED点亮。程序中[ ]中所对应的值先后是?
A、INPUT HIGH
B、INPUT LOW
C、OUTPUT HIGH
D、OUTPUT LOW
解析:【喵呜刷题小喵解析】根据提供的电路图和程序描述,我们可以分析出:1. `/nA INPUT HIGH`:这表示引脚A是高电平输入,可能是连接到按键开关的一端。2. `/nB INPUT LOW`:这表示引脚B是低电平输入,可能是连接到按键开关的另一端和地。3. `/nC OUTPUT HIGH`:这表示引脚C是高电平输出,可能是连接到LED的正极。4. `/nD OUTPUT LOW`:这表示引脚D是低电平输出,可能是连接到LED的负极。根据这些描述,我们可以推测出按键开关的功能是:当按键按下时,引脚A和引脚B之间形成通路,引脚A变为低电平。程序检测到引脚A的低电平输入后,将引脚C设置为高电平,从而点亮LED。因此,当按键开关按下后,LED点亮,程序中的值应该是引脚A为低电平(`INPUT LOW`),而引脚C为高电平(`OUTPUT HIGH`)。综上,对应的值先后是 `/nB INPUT LOW` 和 `/nC OUTPUT HIGH`,因此答案选择B。
13、在串口监视器窗口中输出如下所示图案,对应的程序是?

A 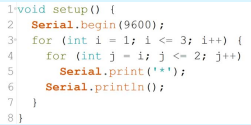
B 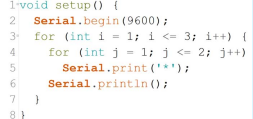
C 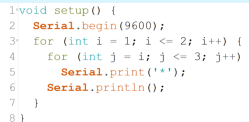
D 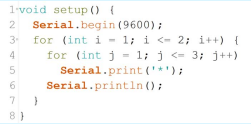
解析:【喵呜刷题小喵解析】根据题目中的图片,我们可以看到在串口监视器窗口中输出的图案是一个菱形的形状,而选项D中的图片也是一个菱形的形状,因此可以判断对应的程序是选项D。其他选项中的图片形状与题目中的图案不符,因此可以排除。
14、下列选项中,属于闭环控制的案例是?
A、按键控制LED灯
B、呼吸灯
C、红外遥控灯
D、超声波自动跟随小车
解析:【喵呜刷题小喵解析】:在给出的选项中,A选项“按键控制LED灯”属于开环控制,因为按键的动作直接控制LED灯的开关,没有反馈机制。B选项“呼吸灯”同样属于开环控制,其呼吸效果是预设的,没有实时的反馈和调整。C选项“红外遥控灯”也是开环控制,因为遥控器的指令直接控制灯的开关和亮度,没有实时的反馈和调整。而D选项“超声波自动跟随小车”属于闭环控制,因为小车通过超声波传感器检测周围环境,并根据反馈调整自身的运动方向和速度,形成一个闭环控制系统。因此,正确答案是D选项。
15、通过光敏电阻控制蜂鸣器的发声频率,程序如下,下列电路中,当光照强度增强时,蜂鸣器的发声频率变高的是?

A 
B 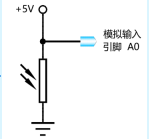
C 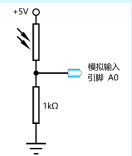
D 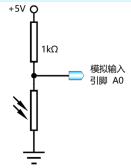
解析:【喵呜刷题小喵解析】首先,我们需要理解题目中的关键信息:通过光敏电阻控制蜂鸣器的发声频率。光敏电阻的阻值会随光照强度的变化而变化,光照越强,阻值越小。蜂鸣器的发声频率通常由与其相连的电路中的电阻值决定,电阻值的变化会影响电流的大小,进而改变蜂鸣器的发声频率。接着,我们观察提供的四个电路图,并逐一分析:A图:蜂鸣器与光敏电阻串联,当光照增强时,光敏电阻阻值减小,整个电路的总电阻减小,电流增大,但蜂鸣器的发声频率与电流大小的关系并不明确,因此不能确定发声频率的变化趋势。B图:蜂鸣器与光敏电阻并联,光敏电阻阻值的变化不会影响蜂鸣器的发声频率,因为并联电路中的电流分配与电阻成反比,光敏电阻的变化不会影响通过蜂鸣器的电流。C图:蜂鸣器与光敏电阻、可变电阻串联,当光照增强时,光敏电阻阻值减小,整个电路的总电阻减小,电流增大。由于蜂鸣器的发声频率与电流大小有明确关系(例如,电流越大,频率越高),因此可以判断发声频率会变高。D图:蜂鸣器与光敏电阻、电容串联,电路中存在电容,电容对电流有滤波作用,使得电流的变化不会直接反映到蜂鸣器的发声频率上,因此不能确定发声频率的变化趋势。综上所述,只有C图中的电路结构能够明确反映出当光照增强时,蜂鸣器的发声频率会变高。因此,正确答案是C。
16、程序的信息处理流程一般包含三个步骤,下列选项中有关其先后顺序描述正确的是?
A、输入(I)、处理(P)、输出(O)
B、输入(I)、输出(O)、处理(P)
C、处理(P)、输入(I)、输出(O)
D、处理(P)、输出(O)、输入(I)
解析:【喵呜刷题小喵解析】:程序的信息处理流程通常遵循输入(Input)、处理(Process)、输出(Output)的顺序。输入是获取数据的过程,处理是对数据进行计算或转换的过程,输出是将处理后的结果呈现给用户或用于进一步处理的过程。因此,正确的顺序应该是输入(I)、处理(P)、输出(O),即选项A。其他选项均不符合这个标准的信息处理流程。
17、Arduino C语言,下列有关break语句,说法正确的是?
A、break语句只能在循环语句中使用
B、在循环语句中,其功能是终止当前的循环的运行,开始下一次循环运行
C、在循环语句中,其功能是终止当前的循环的运行,跳转到循环后续语句运行
D、终止当前程序的执行
解析:【喵呜刷题小喵解析】在C语言中,`break`语句通常用于循环(如`for`、`while`)或`switch`语句中。在循环中,`break`语句的功能是立即终止当前循环,并跳出循环,开始执行循环之后的代码。因此,选项C“在循环语句中,其功能是终止当前的循环的运行,跳转到循环后续语句运行”是正确的。选项A说`break`只能在循环语句中使用是不准确的,因为`break`也可以在`switch`语句中使用。选项B说`break`在循环中终止当前循环并开始下一次循环运行是不正确的,因为`break`会终止当前循环,而不是开始下一次循环。选项D说`break`终止当前程序的执行也是不正确的,因为`break`只终止当前循环或`switch`语句,不会终止整个程序。
18、对于条件表达式A和B,下列选项中,用于描述当A和B两个条件都成立时,整个条件才成立的是?
A、A&&B
B、A||B
C、A!=B
D、A==B
解析:【喵呜刷题小喵解析】:在逻辑运算中,&&表示逻辑与,即两个条件都为真时,整个条件才为真。||表示逻辑或,即A或B至少有一个为真时,整个条件就为真。!=表示逻辑非等于,即A不等于B时,整个条件才为真。==表示逻辑等于,即A等于B时,整个条件才为真。因此,要描述当A和B两个条件都成立时,整个条件才成立,应使用A&&B。
19、Arduino UNO/Nano主控板,读取按键开关的返回值,电路如下图所示,程序中[ ]内正确选项是?

A、INPUT
B、OUTPUT
C、INPUT_PULLUP
D、INPUT_PULLDOWN
解析:【喵呜刷题小喵解析】:根据电路图,按键开关连接到的是Arduino的输入引脚,因此应该使用输入模式。在Arduino中,输入模式可以选择不同的上拉或下拉电阻。在本题中,电路图显示按键开关连接到了INPUT_PULLUP引脚,因此应该选择C选项,即“INPUT_PULLUP”。
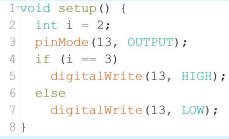
20、Arduino UNO/Nano主控板,程序控制板载LED灯,程序如下,当程序运行时,LED灯的状态是?
A、点亮
B、熄灭
C、闪烁
D、不确定
解析:【喵呜刷题小喵解析】:根据题目中的程序,当程序运行时,LED灯的状态取决于程序中控制LED灯的代码。由于题目中并未提供具体的程序代码,因此无法确定LED灯的具体状态。但根据题目选项,可以推断如果程序中没有包含点亮LED灯的指令,那么LED灯的状态应该是熄灭的。因此,正确答案应该是B选项,即LED灯熄灭。注意,如果题目中提供了具体的程序代码,需要根据代码内容来判断LED灯的状态。
二、多选题
21、Arduino UNO/Nano主控板,下列选项中,可用于保存数据的是?
A、RAM
B、EEPROM
C、Flash
D、GPIO
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,用于保存数据的存储器主要有RAM、EEPROM和Flash。A. RAM(随机存取存储器):RAM是一种可以读取和写入数据的存储器,但它断电后数据会丢失。虽然RAM的速度很快,但不适合长期保存数据。B. EEPROM(电可擦除只读存储器):EEPROM是一种非易失性存储器,断电后数据不会丢失。它通常用于存储一些配置信息,如设定值、传感器校准等。C. Flash:Flash也是一种非易失性存储器,用于存储程序代码和用户数据。在Arduino中,程序通常被烧录到Flash存储器中。D. GPIO(通用输入/输出):GPIO不是用于保存数据的存储器,而是用于输入和输出数字信号的接口。因此,正确答案是A、B和C。
22、Arduino UNO/Nano主控板接收的输入信号,按时间连续性分类,可分为?
A、高频信号
B、低频信号
C、数字信号
D、模拟信号
解析:【喵呜刷题小喵解析】:Arduino UNO/Nano主控板接收的输入信号,按时间连续性分类,可分为数字信号和模拟信号。数字信号是离散的,只有高电平(1)和低电平(0)两种状态,而模拟信号是连续的,可以在一定范围内变化。高频信号和低频信号是按信号的频率来分类的,与时间连续性无直接关系。因此,正确选项为CD,即数字信号和模拟信号。
23、Arduino UNO/Nano主控板,关于PWM,以下说法正确的有?
A、当占空比为25%是,等效输出电压为1.25V
B、利用PWM实现引脚的模拟信号输出
C、PWM是指在数字系统中,通过调整占空比来实现模拟输出
D、Arduino UNO/Nano主控板,均具有6个模拟输出引脚
解析:【喵呜刷题小喵解析】:选项A:当占空比为25%时,等效输出电压为1.25V。这个说法是正确的。在PWM(脉宽调制)中,占空比决定了高电平的时间与整个周期的比例。当占空比为25%时,高电平的时间是整个周期的1/4,如果供电电压是5V,那么等效的输出电压确实是1.25V。选项B:利用PWM实现引脚的模拟信号输出。这也是正确的。PWM是一种通过调整脉冲宽度(即高电平的时间)来模拟输出不同电压的技术,因此可以实现模拟信号输出。选项C:PWM是指在数字系统中,通过调整占空比来实现模拟输出。这是PWM的基本定义。在数字系统中,通过改变脉冲的宽度(即占空比),可以模拟输出不同的电压,从而实现对模拟信号的控制。选项D:Arduino UNO/Nano主控板,均具有6个模拟输出引脚。这也是正确的。Arduino UNO和Nano都提供了6个模拟输入引脚(A0-A5),这些引脚可以用来读取模拟信号,也可以用来输出PWM信号,从而实现模拟信号的输出。但需要注意的是,这些引脚主要用于模拟输入,而不是模拟输出。如果要使用它们进行模拟输出,可能需要额外的硬件或编程技巧。
24、Arduino UNO/Nano主控板,程序中占用1个字节内存的变量类型有?
A、boolean
B、char
C、byte
D、int
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,不同的变量类型占用的内存空间是不同的。A. boolean:布尔类型,通常占用1个字节的内存。B. char:字符类型,也通常占用1个字节的内存。C. byte:字节类型,显然占用1个字节的内存。D. int:整型,通常占用2个字节的内存,不是1个字节。因此,正确答案是A、B和C。
25、Arduino C语言,循环结构常用的语句有?
A、for循环语句
B、while循环语句
C、do...while循环语句
D、switch语句
解析:【喵呜刷题小喵解析】:在Arduino C语言中,常用的循环结构语句包括for循环语句、while循环语句和do...while循环语句。这些语句都是用来重复执行一段代码块,直到满足特定的条件为止。switch语句是一个条件语句,不是循环结构的一部分。因此,答案是A、B、C。
三、判断题
26、HC-SR04超声波传感器信号返回,是通过trig引脚返回高电平。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:HC-SR04超声波传感器在发送超声波脉冲后,会等待接收返回的信号。当接收到返回的超声波信号时,传感器会通过ECHO引脚输出高电平信号,而不是TRIG引脚。因此,原题中的描述是错误的。所以,答案选B。
27、Arduino IDE 上传按键的功能是先编译程序,并将编译后的二进制文件上传到主控板的MCU中。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在Arduino IDE中,上传按键的功能确实包括先编译程序,然后将编译后的二进制文件上传到主控板的MCU中。这是Arduino IDE的基本工作流程,因此选项A是正确的。
28、Arduino UNO/Nano主控板,数字引脚使用前需要通过pinMode()函数设置其模式。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano中,当我们需要使用数字引脚时,确实需要通过`pinMode()`函数来设置其模式。这是因为每个引脚默认都处于未初始化的状态,如果你不先通过`pinMode()`来设定引脚的模式(如输入或输出),那么当你试图读取或写入该引脚时,可能会得到不可预测的结果。因此,使用数字引脚前,通过`pinMode()`函数设置其模式是正确的。
29、Arduino C语言中,switch语句属于选择结构。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在C语言中,switch语句是用于实现多分支选择结构的语句,它可以用于基于不同的条件值选择不同的代码块执行。因此,题目中所述"Arduino C语言中,switch语句属于选择结构"是正确的。
30、Arduino只包含硬件,不包含软件。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:Arduino是一个开放源代码的硬件和软件平台,它不仅仅包含硬件,也包含软件和固件。因此,题目中的说法“Arduino只包含硬件,不包含软件”是错误的。所以,正确答案是B。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




