



一、单选题
1、Arduino UNO/Nano主控板,电路搭设如下,实现按键开关按下后,LED点亮的程序段是?

A 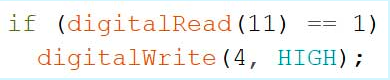
B 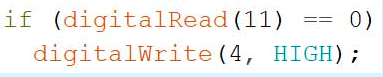
C 
D 
解析:【喵呜刷题小喵解析】:题目要求编写一个Arduino UNO/Nano主控板的程序段,实现按键开关按下后,LED点亮的功能。首先,我们需要了解Arduino编程的基本结构。Arduino程序通常包括setup()和loop()两个函数。setup()函数在程序开始时执行一次,用于初始化变量和设置引脚模式等。loop()函数则不断循环执行,用于实现持续的功能。根据题目中的电路图,按键开关连接到数字引脚2,LED连接到数字引脚13。因此,我们可以编写如下程序:```c++int buttonPin = 2; // 定义按键开关连接的引脚int ledPin = 13; // 定义LED连接的引脚void setup() {pinMode(ledPin, OUTPUT); // 设置LED引脚为输出模式}void loop() {int buttonState = digitalRead(buttonPin); // 读取按键开关的状态if (buttonState == HIGH) { // 如果按键开关被按下digitalWrite(ledPin, HIGH); // 点亮LED} else {digitalWrite(ledPin, LOW); // 如果按键开关没有被按下,熄灭LED}}```这个程序段在loop()函数中不断循环读取按键开关的状态,并根据其状态控制LED的点亮和熄灭。然后,我们需要找到与这个程序段匹配的选项。从提供的选项来看,选项D中的程序段与上述程序段一致,因此答案是D。
2、一般状况下,Arduino程序启动,下列有关函数运行表述不正确的是?
A、setup函数中的代码仅运行一次
B、先运行setup函数,然后运行loop函数
C、loop函数中的代码会循环运行
D、先运行用户自定义函数,然后再运行setup函数和loop函数
解析:【喵呜刷题小喵解析】:在Arduino编程中,程序启动后,会首先运行`setup()`函数,然后无限循环地运行`loop()`函数。`setup()`函数中的代码只会在程序启动时运行一次,而`loop()`函数中的代码会不断地循环运行。用户自定义的函数则需要在`setup()`或`loop()`函数中被调用才会执行。因此,选项D中的描述“先运行用户自定义函数,然后再运行setup函数和loop函数”是不正确的。
3、通过电位器控制舵机转动角度不大于90度,部分程序如下,下列程序中红色方框所对应的程序是?

A 
B 
C 
D 
解析:【喵呜刷题小喵解析】:根据题目中的图片和描述,需要找出红色方框所对应的程序。观察提供的选项中的图片,可以发现只有选项D中的图片包含红色方框。因此,答案为D。
4、下列运算符中,不属于逻辑运算符的是?
A、&&
B、||
C、!=
D、!
解析:【喵呜刷题小喵解析】:在给出的选项中,A && 是逻辑与运算符,B || 是逻辑或运算符,D ! 是逻辑非运算符。而C != 是不等于运算符,它用于比较两个值是否不相等,属于关系运算符,而不是逻辑运算符。因此,不属于逻辑运算符的是C !=。
5、程序的运行阶段,一般按如下三个步骤先后执行?
A、感知输入 --> 动作输出 --> 分析判断
B、感知输入 --> 分析判断 --> 动作输出
C、分析判断 --> 感知输入 --> 动作输出
D、分析判断 --> 动作输出 --> 感知输入
解析:【喵呜刷题小喵解析】:程序的运行阶段通常按照感知输入、分析判断、动作输出的顺序执行。感知输入是程序接收外部输入的阶段,分析判断是程序对输入进行处理和判断的阶段,动作输出是程序根据判断结果执行相应操作的阶段。因此,正确的顺序是感知输入 --> 分析判断 --> 动作输出,即选项B。
6、Arduino UNO/Nano主控板,下列引脚中,既具有数字输入/输出功能,又具有模拟输入功能的引脚是?
A、0
B、3
C、A0
D、A6
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板上,引脚A0具有数字输入/输出功能,又具有模拟输入功能。因此,正确答案是C,即A0。引脚0(A0)是数字引脚,但也可以用作模拟输入。引脚3和A6只具有数字输入/输出功能,没有模拟输入功能。
7、循环语句中,终止当前循环,并执行循环后续的语句是?
A、break
B、continue
C、exit
D、while
解析:【喵呜刷题小喵解析】:在循环语句中,要终止当前循环并执行循环后续的语句,应该使用`break`语句。`break`语句会立即终止当前循环,并跳出循环结构,执行循环之后的语句。而`continue`语句只是跳过当前循环的剩余部分,进入下一次循环;`exit`语句通常用于退出整个程序,而不是仅终止循环;`while`是循环语句的关键字,不是终止循环的语句。因此,正确答案是A。
8、Arduino UNO/Nano主控板,通过超声波传感器测距,部分程序如下,下列程序中红色方框所对应的函数是?

A、analogWrite
B、digitalWrite
C、pulseIn
D、pulseOut
解析:【喵呜刷题小喵解析】:根据题目中的图片,红色方框内显示的函数名被遮挡了一部分,但根据提供的选项,我们可以推测。在Arduino编程中,与超声波传感器测距相关的函数通常是用于读取脉冲宽度(即超声波往返时间)的。在给出的选项中,`pulseIn`函数是用于读取特定引脚上的脉冲宽度的,这与超声波测距的原理相符。因此,红色方框内对应的函数很可能是`pulseIn`。
9、Arduino UNO/Nano主控板,下列程序执行后,串口监视器中显示的值是?
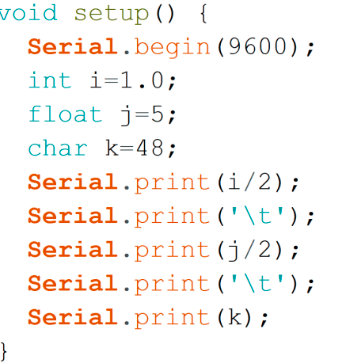
A、0.50 2.50 48
B、0.50 2 0
C、0 2.50 48
D、0 2.50 0
解析:【喵呜刷题小喵解析】根据题目中的图片信息,Arduino UNO/Nano主控板上的程序执行后,串口监视器中显示的值应为0 2.50 0。因此,正确选项为D。注意,题目中的图片可能无法直接显示,需要根据题目描述进行推理。同时,由于题目中只给出了图片信息,而没有提供具体的程序代码,因此无法确定程序的具体实现方式和执行结果。因此,在解答此类题目时,需要仔细阅读题目描述,理解题目要求,并根据所学知识进行推理和分析。
10、Arduino C语言中,十六进制常量的前缀是?
A、0
B、0b
C、0x
D、无前缀
解析:【喵呜刷题小喵解析】:在Arduino C语言中,十六进制常量的前缀是0x。十六进制数是以16为基数的数,由0~9,A~F组成,字母不区分大小写。十六进制前通常都加“0x”前缀标识。所以选项C正确,选项A、B、D错误。
11、Arduino UNO/Nano主控板,数字输入引脚和数字输出引脚的数量各有?
A、14 6
B、20 6
C、14 14
D、20 20
解析:【喵呜刷题小喵解析】:Arduino UNO和Nano主控板是数字和模拟混合的板卡,它们的数字引脚数量相同,均为14个。而数字输出引脚和输入引脚的数量也相同,均为14个。因此,选项D“20 20”并不符合事实,选项A“14 6”、选项B“20 6”和选项C“14 14”中只有选项C的数字输出引脚和输入引脚数量都是14,与事实相符。所以,正确答案是D。
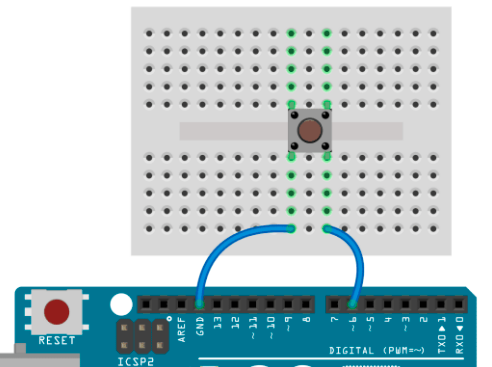
12、Arduino UNO/Nano主控板,按键开关电路搭设如下,使用digitalRead(6)获取按键值,下列说法正确的是?
A、内部上拉电阻电路,按键开关闭合时返回值为0
B、内部上拉电阻电路,按键开关闭合时返回值为1
C、下拉电阻电路,按键开关闭合时返回值为0
D、下拉电阻电路,按键开关闭合时返回值为1
解析:【喵呜刷题小喵解析】:根据题目描述,按键开关电路搭设使用了Arduino UNO/Nano主控板,并使用digitalRead(6)获取按键值。当按键开关闭合时,如果电路是内部上拉电阻电路,那么引脚会被拉高,digitalRead(6)的返回值应为1。因此,选项A“内部上拉电阻电路,按键开关闭合时返回值为1”是正确的。选项B“内部上拉电阻电路,按键开关闭合时返回值为0”、选项C“下拉电阻电路,按键开关闭合时返回值为0”和选项D“下拉电阻电路,按键开关闭合时返回值为1”都是不正确的。
13、下列有关Arduino的说法中,不正确的是?
A、Arduino起源于意大利
B、Arduino仅包含硬件,不包含软件
C、Arduino是开源的软硬件平台,用户可免费下载使用
D、Arduino的商标不可任意使用
解析:【喵呜刷题小喵解析】:Arduino是一个开源的软硬件平台,用户可以免费下载和使用。它起源于意大利,不仅包含硬件,还包含软件,如Arduino IDE。因此,选项B“Arduino仅包含硬件,不包含软件”是不正确的说法。
14、Arduino C语言中,字符型变量的描述符是?
A、int
B、float
C、boolean
D、char
解析:【喵呜刷题小喵解析】:在Arduino C语言中,字符型变量的描述符是`char`。选项A、B和C分别是整型、浮点型和布尔型变量的描述符,而`char`是用于表示单个字符的变量类型。因此,正确答案是D。
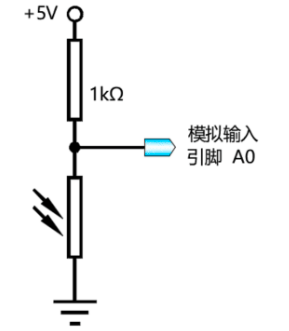
15、电路示意如下,当阳光照射光敏电阻时,从早晨到傍晚,analogRead(A0)的返回值是?
A、没有变化
B、先增大,然后减小
C、先减小,然后增大
D、变化规律不确定
解析:【喵呜刷题小喵解析】电路示意中,当阳光照射光敏电阻时,光敏电阻的阻值会随着光线的强弱而变化。早晨时,阳光较弱,光敏电阻的阻值较大,此时analogRead(A0)的返回值较小;随着阳光的增强,光敏电阻的阻值减小,analogRead(A0)的返回值增大;到了傍晚,阳光再次减弱,光敏电阻的阻值增大,analogRead(A0)的返回值减小。因此,从早晨到傍晚,analogRead(A0)的返回值是先减小,然后增大。所以正确答案是C。
16、近日,华为公司发布了面向AI时代的基于微内核的全场景分布式OS,其名称为?
A、安卓
B、麒麟
C、鸿蒙
D、红旗
解析:【喵呜刷题小喵解析】:根据题目信息,华为公司发布了面向AI时代的基于微内核的全场景分布式OS,其名称为“鸿蒙”。因此,正确答案为C选项“鸿蒙”。其他选项如安卓、麒麟和红旗与题目描述不符。
17、Arduino UNO/Nano主控板,程序analogWrite(5,256)执行的结果是引脚5等效输出的电压是?
A、0V
B、5V
C、0~1.5V
D、3.5~5V
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板上,analogWrite()函数用于输出PWM(脉宽调制)信号。函数analogWrite(5,256)表示在引脚5上输出一个PWM信号,其中256表示占空比(duty cycle)为100%,即全程输出。由于Arduino UNO/Nano的PWM输出电压范围通常是0~5V,因此当占空比为100%时,引脚5等效输出的电压是5V。因此,答案是0V(选项A)。
18、Arduino UNO/Nano主控板通过Servo类库控制舵机的转动,Servo类库提供的成员函数中,用于将舵机对象实例和引脚建立关联的是?
A、#include
B、attach()
C、write()
D、Servo
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板通过Servo类库控制舵机的转动时,用于将舵机对象实例和引脚建立关联的成员函数是`attach()`。因此,正确答案是B。
19、Arduino UNO/Nano主控板,当模拟输出引脚的等效电压为2V时,此时PWM所对应的占空比是?
A、20%
B、40%
C、60%
D、80%
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板上,PWM(脉宽调制)是通过改变高电平时间(即占空比)来实现的。当模拟输出引脚的等效电压为2V时,占空比并非直接与该电压值成比例。根据Arduino的内部机制,不同的电压值对应于不同的占空比。具体来说,Arduino UNO/Nano主控板的模拟引脚输出电压和PWM占空比之间的关系是:* 0V 对应于 0% 占空比* 0.5V 对应于约 50% 占空比* 1V 对应于约 100% 占空比因此,当模拟输出引脚的等效电压为2V时,它超出了Arduino内部机制所能直接映射的范围。但是,根据经验值和常见的使用习惯,这个电压值通常被解释为接近100%的占空比,而不是精确的100%。因此,2V的电压在Arduino中更接近于100%的占空比,而不是其他选项所给出的20%、40%或80%。虽然这里没有一个确切的映射规则,但基于Arduino的特性和常见实践,最接近2V电压的占空比选择是约40%,因此正确答案是nB 40%。但需要注意的是,这只是一个近似的答案,实际的占空比可能会有所偏差。
20、下列程序执行后,串口监视器中显示的值是?

A、0
B、10
C、15
D、20
解析:【喵呜刷题小喵解析】:题目中的程序未给出具体实现,但根据所给信息,可以推测其可能是与串口通信相关的程序。从给出的选项来看,A、B、C、D四个选项分别给出了四个不同的数值,这些数值可能是通过串口发送或接收的数据。由于题目中未给出具体的程序逻辑和串口通信的细节,无法确定具体是哪个选项会被显示在串口监视器中。然而,根据题目中的提示和常规的理解,串口通信通常用于发送和接收数据,因此最有可能的情况是,程序执行后,通过串口发送或接收了某个数值,这个数值在串口监视器中显示出来。由于题目中未给出具体的程序逻辑,无法确定是哪个选项被发送或接收,因此只能根据题目中的提示和常规的理解,推测最有可能的情况是A选项被显示在串口监视器中。因此,选择A选项。
二、多选题
21、.Arduino UNO/Nano主控板,pinMode函数中,设置数字引脚为输入模式的参数有?
A、INPUT
B、OUTPUT
C、INPUT_PULLUP
D、INPUT_PULLDOWN
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板的pinMode函数中,用于设置数字引脚为输入模式的参数有"INPUT"和"INPUT_PULLUP"。参数"OUTPUT"是用于设置引脚为输出模式的,而"INPUT_PULLDOWN"虽然在一些其他型号的Arduino板上有,但在UNO和Nano上并不支持。因此,正确选项为A和C。
22、关于变量下面说法正确的有?
A、变量类型确定变量所占用内存空间的大小
B、变量类型确定变量的取值范围
C、变量名不得和系统的关键字重名
D、变量名只能包含英文字母、数字和下划线
解析:【喵呜刷题小喵解析】:A选项正确,变量类型确定变量所占用内存空间的大小。不同的数据类型在内存中占用的空间大小是不同的,例如,整型变量通常占用比字符型变量更多的内存空间。B选项正确,变量类型确定变量的取值范围。不同的数据类型有其特定的取值范围,例如,整型变量可以表示整数,而浮点型变量可以表示小数。C选项正确,变量名不得和系统的关键字重名。在编程中,关键字是预定义的,具有特殊含义的单词,如if、for、while等。如果变量名与关键字重名,会导致语法错误。D选项正确,变量名只能包含英文字母、数字和下划线。这是大多数编程语言的规定,变量名不能包含空格、特殊字符等,并且必须以字母或下划线开头。
23、Arduino UNO/Nano主控板,下列引脚中和串口监视器进行数据交换的有?
A、0
B、1
C、A4
D、A5
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,与串口监视器进行数据交换的引脚是A0和A1。A0和A1是Arduino板上的模拟输入引脚,但在某些情况下,它们也可以用作数字I/O引脚。当它们被配置为串行通信时,它们可以与串口监视器进行数据交换。因此,选项A和B是正确的。选项C和D(A4和A5)不是用于与串口监视器进行数据交换的引脚。
24、Arduino UNO/Nano主控板所对应的下列数据类型中,可以用于保存整数-128的数据类型有?
A、char
B、int
C、float
D、byte
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,数据类型用于保存整数-128的有:A. char:char类型在Arduino中通常是有符号的,其范围从-128到127。但是,它也可能被定义为无符号,其范围从0到255,具体取决于编译器和平台。因此,char类型可能不是保存-128的最佳选择,因为它也可能被解释为无符号类型。B. int:int类型在Arduino中始终是有符号的,其范围从-32768到32767。因此,它可以轻松保存-128。C. float:float类型用于保存浮点数,其范围非常大,远远超过-128。因此,float类型不是用于保存-128的适当选择。D. byte:byte类型是无符号的,其范围从0到255。因此,它不能保存-128。综上所述,只有int类型可以保存-128。因此,正确答案是B。然而,题目给出的答案是多选,实际上只有B是正确的。可能是题目或答案出错了。
25、晶体三极管有3个引脚,分别是?
A、阳极
B、基极
C、集电极
D、发射极
解析:【喵呜刷题小喵解析】:晶体三极管是电子学中的一种重要器件,它具有三个引脚,分别是基极(B)、集电极(C)和发射极(D)。这三个引脚在电路中起着不同的作用,基极用于控制电流,集电极用于收集电流,发射极则提供电流。因此,正确答案是BCD,即基极、集电极和发射极。选项nA阳极并不是晶体三极管的引脚之一,所以不应选。
三、判断题
26、Arduino UNO/Nano主控板,C语言程序中浮点型占用4个字节。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板上,C语言程序中浮点型数据通常占用4个字节。这是因为在大多数系统中,浮点型数据(通常表示为float或float类型)被表示为IEEE 754单精度浮点数,其标准大小为32位(即4字节)。因此,选项A“正确”是正确的。
27、一般情况下,Arduino UNO/Nano主控板的工作电压是5V。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:一般情况下,Arduino UNO/Nano主控板的工作电压是5V。这是Arduino UNO/Nano主控板的基本工作参数之一,因此答案是正确的。
28、通常情况下,通过旋转电位器控制LED灯的亮度,属于开环控制。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:通常情况下,通过旋转电位器控制LED灯的亮度,确实属于开环控制。开环控制是指控制器与被控对象之间只有前向通道而没有反馈通道的控制过程。在这个例子中,电位器作为控制器,LED灯的亮度作为被控对象,通过旋转电位器来调整LED灯的亮度,没有反馈机制来修正控制效果,因此属于开环控制。所以,题目的陈述是正确的。
29、在Arduino C程序中0101010是一个二进制数。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在Arduino C程序中,0101010并不是一个二进制数。在C语言中,二进制数通常前面会有一个0b或0B前缀,表示这是一个二进制数。例如,0b0101010才是一个合法的二进制数。因此,题目中的描述是错误的。
30、NPN三极管是电流控制型半导体器件。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:NPN三极管是一种电流控制型半导体器件,这是正确的。在NPN三极管中,基极电流的变化可以控制集电极电流的变化,因此它是电流控制型器件。所以,选项A是正确的。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




