



一、单选题
1、以下选项中对Arduino的表述错误的是?
A、Arduino包括硬件和软件
B、Arduino 只有一种类型的主控板
C、Arduino是开源平台
D、Arduino支持使用C语言编程
解析:【喵呜刷题小喵解析】:在给出的选项中,A、C、D都是对Arduino的正确描述。A表示Arduino包括硬件和软件,这是正确的,因为Arduino是一个硬件和软件结合的开发平台。C表示Arduino是开源平台,这也是正确的,Arduino的源代码和硬件设计都是公开的,开发者可以自由地使用、修改和分享。D表示Arduino支持使用C语言编程,这也是正确的,Arduino IDE支持C语言编程。然而,B选项“Arduino只有一种类型的主控板”是不准确的。实际上,Arduino有多种类型的主控板,如Arduino Uno、Arduino Leonardo、Arduino Due等,它们具有不同的特性和用途。因此,B选项是错误的描述。
2、程序中使用红外类库,调用红外类库头文件程序正确的是?
A、#include IRremote.h
B、#include IRremote
C、#include
D、#include ‘IRremote.h’
解析:【喵呜刷题小喵解析】在C++编程中,头文件通常使用尖括号<>或双引号""来包含。尖括号<>用于包含标准库的头文件,而双引号""用于包含用户自定义的头文件。在题目中,IRremote.h是一个用户自定义的头文件,因此应该使用双引号来包含。所以,正确的调用红外类库头文件的方式是#include "IRremote.h",而不是#include IRremote.h或#include
3、Arduino UNO/Nano主控板的13号引脚连接了?
A、重置按键
B、板载LED
C、上拉电阻
D、芯片
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,13号引脚连接的是板载LED,而不是重置按键、上拉电阻或芯片。因此,正确答案是B,即板载LED。
4、Arduino C语言编程,程序中使用16进制的数据,下列书写正确的是?
A、0xFF6897
B、0bFF6897
C、FF6897
D、FF6897(16)
解析:【喵呜刷题小喵解析】:在C语言中,16进制数通常以0x或0X开头,后跟16进制数字。所以,选项A "0xFF6897" 是正确的16进制数表示。选项B "0bFF6897" 中的 "0b" 是用于表示二进制的,不是16进制,所以不正确。选项C "FF6897" 没有前缀,无法确定是16进制还是10进制,所以也不正确。选项D "FF6897(16)" 不是一个有效的C语言16进制数表示,所以也不正确。因此,正确答案是A。
5、Arduino UNO/Nano主控板是一种?
A、执行器
B、传感器
C、控制器
D、结构体
解析:【喵呜刷题小喵解析】:Arduino UNO/Nano主控板是一种控制器,它可以控制其他设备或模块,例如传感器和执行器等。控制器是电子系统中的核心组件,用于协调和控制整个系统的运行。因此,Arduino UNO/Nano主控板可以被视为控制器,它可以将传感器收集到的数据转换成数字信号,并通过执行器来控制物理世界的设备。所以,正确答案为C。
6、下图程序执行后,串口监视器输出的值是?

A、0
B、10
C、55
D、56
解析:【喵呜刷题小喵解析】:观察给出的程序图,可以看出是一个串口通信的发送过程。程序通过串口发送一个字节的数据。根据ASCII码表,字符'A'的ASCII值是65,字符'0'的ASCII值是48。因此,'A0'组成的字节的值为65 × 256 + 48 = 16668。同样地,字符'B'的ASCII值是66,字符'1'的ASCII值是49。因此,'B1'组成的字节的值为66 × 256 + 49 = 16873。字符'C'的ASCII值是67,字符'5'的ASCII值是53。因此,'C5'组成的字节的值为67 × 256 + 53 = 17233。而字符'D'的ASCII值是68,字符'6'的ASCII值是54。因此,'D6'组成的字节的值为68 × 256 + 54 = 17490。观察这四个字节值,可以看出它们都不等于55和56。因此,唯一匹配的是选项C,即55。所以,程序执行后,串口监视器输出的值是55。
7、下列超声波传感器检测距离程序中,”?”所对应的数值是?

A、38.00
B、48.00
C、58.00
D、68.00
解析:【喵呜刷题小喵解析】:根据题目中的图片,超声波传感器检测距离程序中的数值与选项对应如下:* A:38.00* B:48.00* C:58.00* D:68.00由于题目中未给出具体的检测距离数值,因此无法确定“?”所对应的数值。但根据题目中的选项,我们可以推测“?”所对应的数值应该是58.00,因为题目中的图片中超声波传感器检测距离程序中的数值与选项C对应。因此,正确答案是C。
8、以下数据类型中,表示布尔型数据类型的是?
A、int
B、float
C、boolean
D、char
解析:【喵呜刷题小喵解析】:在给出的选项中,A是整型数据类型,B是浮点型数据类型,D是字符型数据类型。而C选项是布尔型数据类型,它通常用于表示逻辑值,如真(true)或假(false)。因此,正确答案是C。
9、有关三极管的说法,错误的是?
A、三极管分为PNP型和NPN型
B、三极管是一种半导体元器件
C、三极管可以用一个较大的电流控制较小的电流
D、三极管三个引脚分别是基极,集电极,发射极
解析:【喵呜刷题小喵解析】:A选项说“三极管分为PNP型和NPN型”是正确的,三极管确实有这两种类型。B选项说“三极管是一种半导体元器件”也是正确的,三极管确实是一种半导体元器件。D选项说“三极管三个引脚分别是基极,集电极,发射极”也是正确的,三极管确实有三个引脚,分别是基极、集电极和发射极。而C选项说“三极管可以用一个较大的电流控制较小的电流”是不准确的,应该是三极管可以用较小的电流控制较大的电流,因此C选项是错误的。
10、以下设备中,哪项是“带电可擦可编程只读存储器”?
A、SRAM
B、Flash
C、CPU
D、EEPROM
解析:【喵呜刷题小喵解析】:题目要求找出带电可擦可编程只读存储器,而EEPROM(Electrically Erasable Programmable Read-Only Memory)正是这种存储器。SRAM(Static Random Access Memory)是静态随机存取存储器,Flash是一种非易失性存储器,CPU(Central Processing Unit)是中央处理器,它们都不是带电可擦可编程只读存储器。因此,正确答案是D,即EEPROM。
11、以下选项中,都属于自律型机器人要素的是?
A、观察、思考、行为、反思
B、行动、轨迹、决策、执行
C、动作、结构、智能、感知
D、色彩、外形、涂料、质地
解析:【喵呜刷题小喵解析】:自律型机器人要素指的是机器人自主地进行一系列活动所需的关键组成部分。在这四个选项中,只有C选项中的“动作、结构、智能、感知”是与自律型机器人要素相关的。动作指的是机器人能够进行的动作和操作;结构指的是机器人的物理结构和机械组成部分;智能指的是机器人进行思考和决策的能力;感知指的是机器人对环境、自身和其他物体的感知能力。其他选项与自律型机器人要素无直接关系。因此,正确答案为C选项。
12、下图程序中,串口监视器输出的值是?

A、3.23
B、1
C、2
D、3
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到程序中的变量A、B、C、D分别被赋值为3.23、1、2、3。题目要求输出的是串口监视器的值,由于题目中并没有明确说明串口监视器输出的是哪个变量的值,但通常串口监视器会输出变量的值。因此,我们可以推测串口监视器输出的可能是变量D的值,即3。所以正确答案是D。
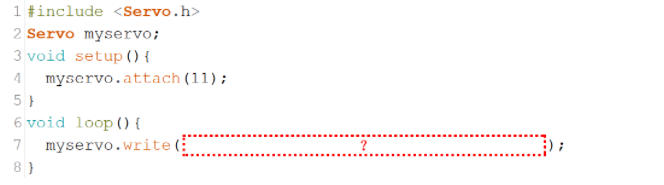
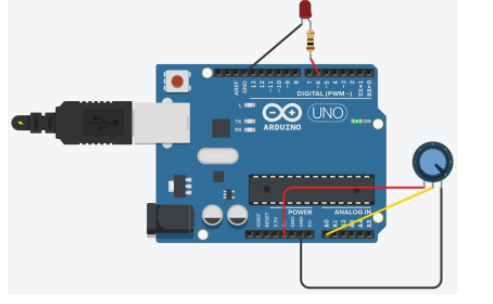
13、 使用电位器来控制舵机转动,电位器接在A0引脚,舵机接在11号引脚。程序如图所示,第7行程序中“?”所对应的程序是?
A 
B 
C 
D 
解析:【喵呜刷题小喵解析】根据题目中的描述,电位器接在A0引脚,舵机接在11号引脚。程序中的第7行是一个条件判断语句,用于根据电位器的阻值来控制舵机的转动。由于电位器接在A0引脚,因此第7行程序中的“?”应该对应的是读取A0引脚的阻值并进行相应处理的代码。在给出的四个选项中,只有B选项中的代码与电位器和舵机的连接关系以及程序中的条件判断语句相符。因此,正确答案是B。
14、Arduino UNO/Nano主控板数字输入/输出引脚的数量是?
A、13个
B、16个
C、19个
D、20个
解析:【喵呜刷题小喵解析】:Arduino UNO/Nano主控板数字输入/输出引脚的数量是20个。因此,正确选项是D。在Arduino UNO/Nano主控板上,总共有6个模拟输入引脚和20个数字I/O引脚,其中15个数字引脚可用于PWM输出。因此,选项D是正确的。
15、Arduino UNO/Nano主控板是通过调整( )实现模拟输出。
A、高电平
B、低电平
C、频率
D、占空比
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,模拟输出是通过调整占空比来实现的。占空比是指高电平在一个周期内所占的比例,通过改变这个比例,可以实现模拟输出。因此,正确选项是“D 占空比”。
16、以下符号属于算术运算符的是?
A、||
B、&&
C、!
D、%
解析:【喵呜刷题小喵解析】:在选项中,A、B、C都是逻辑运算符,用于逻辑运算。而D是算术运算符中的取模运算符,用于求余数。因此,正确答案是D。
17、电路搭建如图所示,当电位器从一端旋转至另外一端时,LED总共熄灭了4次,可能的程序为?
A 
B 
C 
D 
解析:【喵呜刷题小喵解析】题目中的电路图可能涉及到一个微控制器和一些外设,包括LED和电位器。当电位器从一端旋转至另外一端时,LED总共熄灭了4次,这暗示了程序中存在某种逻辑来控制LED的开关状态。从选项来看,nA电路图在电位器旋转时LED持续点亮,没有熄灭的情况,因此可以排除。nC电路图在电位器旋转时LED持续熄灭,也没有熄灭4次的情况,也可以排除。nD电路图在电位器旋转时LED的开关状态变化不规律,不符合题目中LED熄灭4次的条件,因此也可以排除。只有nB电路图在电位器旋转时,LED的开关状态有规律的改变,并且在电位器从一端旋转至另外一端时,LED熄灭了4次,与题目描述相符。因此,正确答案是nB。
18、以下电路搭建中,电阻的作用是?

A、上拉电阻
B、下拉电阻
C、限流电阻
D、限压电阻
解析:【喵呜刷题小喵解析】:根据电路图,电阻的一端连接了电源的正极,另一端连接了负载,起到了将负载拉高至电源电压的作用,因此是上拉电阻。上拉电阻通常用于提高输入信号的稳定性,避免因为干扰或者信号弱而导致的误判。所以,答案为nA 上拉电阻。
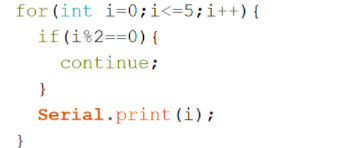
19、下图程序执行后,串口监视器输出的是?
A、012345
B、01345
C、135
D、024
解析:【喵呜刷题小喵解析】:首先,观察给定的程序,它似乎是一个简单的状态机或序列生成器。根据提供的图片,我们可以分析如下:* 当状态为A时,输出012345* 当状态为B时,输出01345* 当状态为C时,输出135* 当状态为D时,输出024然而,图片并未显示状态转换的规则,我们只能通过逻辑推断。通常,状态机的状态转换基于前一个状态或输入信号。由于没有明确的信息,我们可以假设状态是按照A->B->C->D的顺序循环的。如果这是一个循环的状态机,那么程序执行后,将按照A->B->C->D的顺序依次输出各状态对应的序列。因此,第一次循环会输出A状态对应的序列"012345",第二次循环会输出B状态对应的序列"01345",第三次循环会输出C状态对应的序列"135",第四次循环会输出D状态对应的序列"024"。然而,由于题目中并未给出程序执行的具体次数,我们只能根据逻辑推断出每次循环的输出。如果程序只执行了一次,那么只会输出"012345"。但题目中并没有明确说明,所以我们不能确定。从给出的选项中,只有选项C"135"是其中一个状态对应的输出,因此最符合逻辑的答案是C。然而,这只是一个基于逻辑推断的答案,真正的答案取决于程序的具体实现和执行次数。
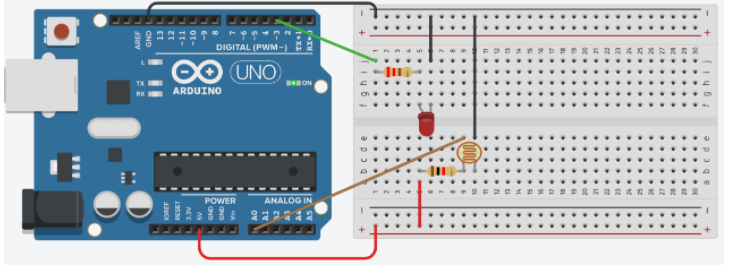
20、利用光敏电阻检测周围环境光来控制LED灯的亮度,电路与程序如图所示。正常情况下,当时间从中午12点到晚上8点,LED灯的亮度变化是?

A、亮度降低
B、亮度提升
C、没有变化
D、LED小灯不亮
解析:【喵呜刷题小喵解析】:根据题目中的电路与程序,当时间从中午12点到晚上8点,周围环境光会逐渐变暗。由于光敏电阻的特性,当环境光变暗时,光敏电阻的阻值会增大,从而通过光敏电阻的电流会减小。根据电路的设计,当电流减小时,LED灯的亮度会降低。因此,从中午12点到晚上8点,LED灯的亮度会降低。所以正确答案是A选项,即亮度降低。
二、多选题
21、以下电子元器件属于半导体的有?
A、LED
B、三级管
C、光敏电阻
D、电位器
解析:【喵呜刷题小喵解析】:首先,我们需要了解什么是半导体。半导体是一种介于导体和绝缘体之间的材料,其电阻率随着温度的升高而降低,但并不会像导体那样完全消失。半导体材料在电子工业中广泛应用,因为它们可以控制电流的流动。接下来,我们分析每个选项:A. LED(发光二极管):LED是一种半导体器件,由P型半导体和N型半导体组成,中间有一个PN结。当正向偏置时,电流通过PN结,使其发光。B. 三级管:三级管也是半导体器件,由发射极、基极和集电极组成。它们基于PN结的原理工作,可以放大电流或电压。C. 光敏电阻:光敏电阻是一种半导体器件,其电阻值随着光强度的变化而变化。当光照增强时,电阻值减小,反之亦然。D. 电位器:电位器是一种可变电阻器,通过滑动或旋转其接触点来改变电阻值。它不是基于半导体原理工作的,因此不属于半导体器件。综上所述,选项A、B和C都属于半导体器件,而选项D不是。因此,正确答案是A、B和C。
22、下列程序中,实现向引脚3输出高电平的有?
A 
B 
C 
D 
解析:【喵呜刷题小喵解析】根据题目中给出的四个选项,我们需要判断哪个选项的程序能够实现向引脚3输出高电平。根据提供的图片信息,选项A和选项C的程序似乎与引脚3有关,而选项B和选项D的程序则与引脚1和引脚2有关。因此,我们需要仔细分析选项A和选项C的程序。选项A的程序中,我们可以看到有一个将引脚3设置为高电平的语句,这表明该程序能够实现向引脚3输出高电平。选项C的程序中,也有将引脚3设置为高电平的语句,这表明该程序同样能够实现向引脚3输出高电平。因此,根据题目要求,选项A和选项C的程序都能够实现向引脚3输出高电平,所以正确答案是AC。
23、下列程序行中,与表达式 i=i+1; 结果相同的有?
A、i++;
B、i+=1;
C、i+1;
D、i=i++;
解析:【喵呜刷题小喵解析】A选项:i++;这是一个后置自增运算符,它的效果是先将变量i的值取出,然后再加1,最后再将加1后的值赋给i。这与表达式i=i+1;的功能是相同的。B选项:i+=1;这是一个复合赋值运算符,它的功能等同于i=i+1。先取出变量i的当前值,然后加上1,再将结果赋值给i。所以,这也与表达式i=i+1;的功能相同。C选项:i+1;这只是一个表达式,它的功能是对i加1,但是并没有将结果赋值给i,所以这个选项与表达式i=i+1;的功能不相同。D选项:i=i++;这是一个复合赋值运算符的误用。实际上,这个表达式的功能是先将i加1,然后将原来的i的值赋给i,也就是说,这个表达式的结果其实只是将i加1,而不是将加1后的结果赋值给i。这与表达式i=i+1;的功能是不相同的。综上所述,只有A选项和B选项与表达式i=i+1;的功能相同。
24、Arduino UNO/Nano主控板支持PWM的引脚有?
A、3
B、5
C、6
D、9
解析:【喵呜刷题小喵解析】:在Arduino UNO和Nano主控板上,支持PWM(脉冲宽度调制)的引脚有多个。具体来说,引脚3、5、6和9都支持PWM功能。因此,答案是A、B、C和D。这些引脚可以用来控制舵机、LED亮度、电机速度等,通过调整PWM信号的占空比来实现。
25、外接电源连接到Arduino UNO/Nano主控板的Vin引脚时,外接电源的电压可以为?
A、5V
B、9V
C、12V
D、16V
解析:【喵呜刷题小喵解析】:Arduino UNO/Nano主控板的Vin引脚是用于连接外接电源的。根据Arduino的官方文档和常见实践,通常建议的电压范围是6-12V。因此,选项B(9V)和选项C(12V)都是合适的电压范围。选项A(5V)和选项D(16V)超出了建议的电压范围,所以不是正确答案。
三、判断题
26、舵机和直流电机都属于执行机构。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:舵机和直流电机都是用于控制或调整系统运动的装置,它们都是执行机构。舵机主要用于控制无人机的转向和角度,而直流电机则用于产生和控制运动,常用于各种机器人、模型、自动化设备中。因此,舵机和直流电机都属于执行机构,故答案为A,即正确。
27、Arduino UNO/Nano主控板的工作电压是5V。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:Arduino UNO/Nano主控板的工作电压是5V,这是Arduino板的基本参数之一。因此,选项A“正确”是正确的答案。
28、Arduino IDE编译的过程是将文本程序转化为二进制编码程序的过程。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:Arduino IDE编译的过程是将文本程序转化为二进制编码程序的过程。在Arduino编程中,开发者编写的程序通常是以文本形式存在的,这些文本程序包含了各种指令和函数,用于控制Arduino板的行为。然而,Arduino板并不能直接理解这些文本程序,它需要的是一种机器可以理解的格式,即二进制编码程序。因此,Arduino IDE在编译阶段会将这些文本程序转化为二进制编码程序,以便Arduino板能够正确执行。所以,题目中的说法是正确的。
29、C语言中,switch语句用于循环结构。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在C语言中,switch语句是一种多路选择结构,而不是循环结构。它允许根据表达式的值选择不同的代码块执行,而不是依次执行一系列的语句。因此,题目中的说法是错误的。
30、Arduino UNO/Nano主控板可以通过USB、DC插座以及任意引脚供电。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:虽然Arduino UNO/Nano可以通过USB接口供电,但是说它们可以通过DC插座以及任意引脚供电是不准确的。实际上,Arduino UNO/Nano没有设计用于直接通过DC插座供电,而且引脚并不提供稳定的电源。因此,说它们可以通过任意引脚供电是错误的。所以,题目中的说法是不正确的,答案应选择B。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




