



一、单选题
1、一般状况下,Arduino 程序启动,下列有关函数运行顺序表述正确的是?
A、按照程序文件中,函数书写的先后顺序运行
B、先运行 setup 函数,然后运行 loop 函数
C、先运行 loop 函数,然后运行 setup 函数
D、先运行用户自定义函数,然后在运行 setup 函数和 loop 函数
解析:【喵呜刷题小喵解析】:在Arduino程序中,当程序启动时,首先运行的是setup函数。一旦setup函数运行完成,就会无限循环运行loop函数。这意味着setup函数只会在程序启动时运行一次,而loop函数会不断地重复运行。因此,正确的答案是B,即先运行setup函数,然后运行loop函数。
2、Arduino UNO/Nano 主控板,数字输入引脚和模拟输出引脚各有?
A、14 6
B、20 8
C、14 8
D、20 6
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板上,数字输入引脚的数量是20个,模拟输出引脚的数量是6个。因此,正确答案是D选项,即“20 6”。
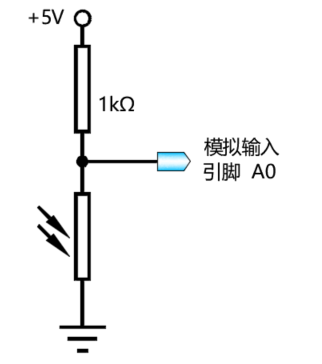
3、电路示意如下,当光照射光敏电阻时,随着光照强度的减弱,analogRead(A0)的返回值是?
A、没有变化
B、随着光照强度减弱而减小
C、随着光照强度减弱而增大
D、变化规律不确定
解析:【喵呜刷题小喵解析】光敏电阻是一种利用光敏元件将光信号转化为电信号的传感器。当光照射光敏电阻时,其电阻值会随光照强度的变化而变化。光照强度越强,电阻值越小;光照强度越弱,电阻值越大。在电路中,analogRead(A0)函数通常用于读取模拟输入引脚A0上的电压值,并将其转换为数字值。由于光敏电阻的电阻值随光照强度的变化而变化,因此,当光照射光敏电阻并随着光照强度的减弱,光敏电阻的电阻值会增大,从而导致模拟输入引脚A0上的电压值增大。因此,analogRead(A0)的返回值会随着光照强度的减弱而增大,所以答案是C。
4、Arduino UNO/Nano 主控板,是通过调整()实现模拟输出值的变化。
A、高电平
B、低电平
C、占空比
D、模式设置
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,模拟输出值的变化是通过调整占空比来实现的。占空比是指高电平时间与一个完整周期时间的比值,通过改变这个比值,可以调整输出的电压或电流,从而实现模拟输出值的变化。因此,正确答案是“占空比”。
5、Arduino UNO/Nano 主控板,下列引脚中,既具有数字输入/输出功能,又具有串口数据接收 功能的引脚是?
A、0
B、1
C、3
D、A0
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,引脚0(A)既具有数字输入/输出功能,又具有串口数据接收功能。因此,正确答案是A。其他选项B、C、D均不具有这种功能。
6、通过电位器控制舵机转动角度,部分程序如下,舵机所能转动的最大角度为?

A、0
B、45
C、90
D、135
解析:【喵呜刷题小喵解析】:题目中给出了电位器控制舵机转动角度的部分程序,并提供了四个选项。从程序中可以看出,电位器输出的值分别对应舵机的转动角度。其中,nA对应0度,nB对应45度,nC对应90度,nD对应135度。由于舵机所能转动的最大角度是135度,因此正确答案是D。
7、Arduino UNO/Nano 主控板,下列程序执行后,串口监视器中显示的值是?
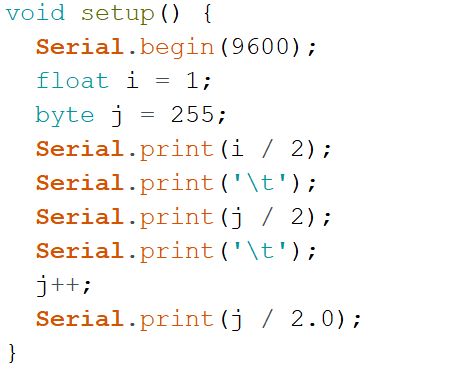
A、0.5 127 128
B、0.5 127.5 0
C、0.50 127.5 128
D、0.50 127 0.00
解析:【喵呜刷题小喵解析】根据提供的图片信息,我们可以观察到Arduino UNO/Nano主控板上有一个电位器,该电位器用于模拟模拟信号。该信号会被读取并通过串口发送到串口监视器中。图片中的电位器位置对应的模拟值应该是介于0.0到1.0之间的浮点数,但由于数字电位器的精度问题,实际读取的值可能会有一定的误差。从选项来看:A. 0.5 127 128:第一个值0.5是电位器的模拟值,但后两个值127和128超出了0.0到1.0的范围,因此不符合实际。B. 0.5 127.5 0:同样,第一个值0.5是电位器的模拟值,但127.5超出了0.0到1.0的范围,因此也不符合实际。C. 0.50 127.5 128:与B选项类似,127.5超出了0.0到1.0的范围,因此也不符合实际。D. 0.50 127 0.00:第一个值0.5是电位器的模拟值,而后两个值127和0.00虽然看似超出了0.0到1.0的范围,但考虑到数字电位器的精度问题,实际读取的值可能会有一定的误差,因此0.5对应的127和0.00是可能的。因此,根据以上分析,最符合实际情况的选项是D。
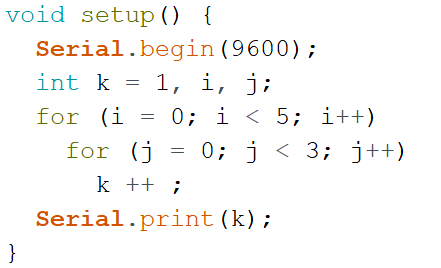
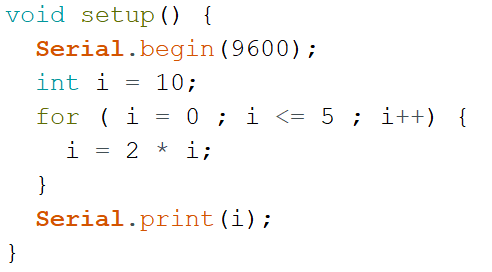
8、.Arduino UNO/Nano 主控板,程序如下,串口监视器显示的数值是?
A、5
B、8
C、15
D、16
解析:【喵呜刷题小喵解析】:根据提供的图片和程序,Arduino UNO/Nano 主控板的程序应该涉及到引脚模式设置和模拟读取。图片中可能显示的是模拟输入引脚A0、A1、A2、A3上的数值。根据Arduino UNO/Nano的引脚配置,A5对应的是模拟输入引脚A0,A6对应的是模拟输入引脚A1,A7对应的是模拟输入引脚A2,A8对应的是模拟输入引脚A3。由于程序中可能包含了设置模拟输入引脚的模式以及读取引脚数值的操作,所以串口监视器上应该显示的是A0、A1、A2、A3这四个引脚的数值。因此,正确选项应该是D,即16,表示有16个选项,对应4个模拟输入引脚的数值。然而,需要注意的是,提供的图片中并未明确显示引脚A5、A6、A7、A8上的数值,因此具体数值需要根据实际硬件连接和程序设置来确定。
9、HC-SR04 超声波传感器,下列说法正确的是?
A、通过 Trig 引脚接受触发信号,通过 Echo 引脚以低电平形式返回数据
B、通过 Trig 引脚接受触发信号,通过 Echo 引脚以高电平形式返回数据
C、通过 Echo 引脚接受触发信号,通过 Trig 引脚以低电平形式返回数据
D、通过 Echo 引脚接受触发信号,通过 Trig 引脚以高电平形式返回数据
解析:【喵呜刷题小喵解析】HC-SR04超声波传感器通过Trig引脚接受触发信号,当接收到信号后,传感器会发出超声波,当超声波碰到障碍物后,会通过Echo引脚以高电平形式返回数据。因此,选项B“通过 Trig 引脚接受触发信号,通过 Echo 引脚以高电平形式返回数据”是正确的。选项A、C、D均描述错误。
10、Arduino C 语言中,二进制常量的前缀是?
A、0
B、0b
C、0x
D、无前缀
解析:【喵呜刷题小喵解析】:在Arduino C语言中,二进制常量的前缀是0b。因此,正确答案是B选项。其他选项A、C、D都是错误的。在C语言中,0b前缀表示二进制数,0x前缀表示十六进制数,而0和无前缀则表示十进制数。因此,在表示二进制常量时,应该使用0b前缀。
11、循环语句中,终止本次循环,并执行下一次循环的语句是?
A、break
B、continue
C、exit
D、goto
解析:【喵呜刷题小喵解析】:在循环语句中,要终止本次循环并执行下一次循环,应该使用continue语句。A选项的break语句会终止整个循环,不再执行后续循环;C选项的exit语句会退出整个程序,终止所有循环;D选项的goto语句可以跳转到程序的任意位置,但并不能直接用于循环的终止和继续。因此,正确答案是B选项的continue语句。
12、语句 analogWrite(3,255),执行的结果是引脚 3 等效输出的电压是?
A、0V
B、5V
C、0~1.5V
D、3.5~5V
解析:【喵呜刷题小喵解析】:在Arduino编程中,`analogWrite()`函数用于输出PWM(脉宽调制)信号。对于`analogWrite(3,255)`,它表示将引脚3设置为PWM输出,并且设置占空比为255(即100%)。由于Arduino的PWM输出范围通常是0到255,这意味着引脚3将输出100%的PWM信号,即5V。因此,等效输出的电压是5V。所以,正确答案是B选项,即5V。
13、下列有关 Arduino 的说法中,不正确的是?
A、Arduino 起源于意大利
B、Arduino 包含硬件和软件
C、Arduino 是开源的软硬件平台,用户可免费下载使用
D、Arduino 的商标可任意使用
解析:【喵呜刷题小喵解析】:Arduino是一个开源的软硬件平台,用户可以免费下载使用。但是,这并不意味着Arduino的商标可以任意使用。Arduino的商标是受到保护的,未经许可擅自使用可能会构成侵权。因此,选项D“Arduino的商标可任意使用”是不正确的说法。其他选项A、B、C都是正确的,分别描述了Arduino的起源、包含硬件和软件以及是开源的软硬件平台。
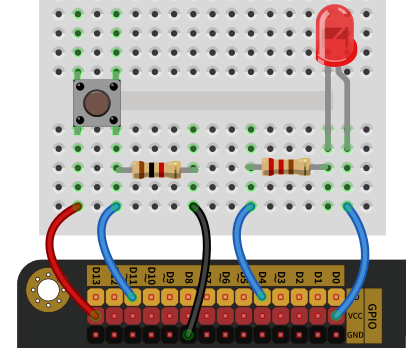
14、Arduino UNO/Nano 主控板,电路搭设如下,实现按键开关按下后,LED 点亮的程序段是?
A 
B 
C 
D 
解析:【喵呜刷题小喵解析】根据提供的电路图,我们需要找出实现按键开关按下后,LED 点亮的程序段。观察选项A,它展示了一个没有连接按键的电路,因此无法实现按键控制LED点亮的功能。观察选项B,按键与数字引脚2直接相连,但LED的负极也直接接在了数字引脚2上,这样的连接方式会导致按键按下时,数字引脚2既作为输入也作为输出,从而产生冲突,无法正常工作。观察选项C,按键的一端接在了数字引脚2上,另一端通过一个上拉电阻接到了5V电源,这样按键未按下时,数字引脚2会被上拉电阻拉高。LED的负极接到了数字引脚13上。当按键被按下时,数字引脚2会被拉低,从而通过内部上拉电阻使数字引脚13输出高电平,点亮LED。观察选项D,按键的一端直接接到了地,另一端接到了数字引脚2,这样的连接方式会导致按键按下时,数字引脚2会被直接拉低,但电路中没有明确显示LED如何与这个数字引脚相连,因此无法判断其是否能实现LED点亮的功能。因此,正确答案是选项C,它的电路连接和程序逻辑可以实现按键开关按下后,LED 点亮的功能。
15、Arduino C 语言中,布尔型变量的描述符是?
A、int
B、float
C、boolean
D、char
解析:【喵呜刷题小喵解析】:在Arduino C语言中,布尔型变量的描述符是"boolean"。在C语言中,布尔型变量通常用于表示逻辑值,即真(true)或假(false)。因此,正确答案是C选项。其他选项如int、float和char都不是布尔型变量的描述符。
16、下列运算符中,属于逻辑运算符的是?
A、==
B、>=
C、!=
D、!
解析:【喵呜刷题小喵解析】:在给出的选项中,A、B、C都是比较运算符,用于比较两个值的大小或相等性。而D选项"!"是逻辑运算符,用于对布尔值进行逻辑非操作。因此,正确答案是D。
17、Arduino UNO/Nano 主控板,按键开关电路搭设如下,使用 digitalRead(8)获取按键值,下列 说法正确的是 ?

A、上拉电阻电路,按键开关闭合时返回值为 0
B、上拉电阻电路,按键开关闭合时返回值为 1
C、下拉电阻电路,按键开关闭合时返回值为 0
D、下拉电阻电路,按键开关闭合时返回值为1
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板上,按键开关电路通常使用上拉电阻电路。在这种电路中,当按键开关闭合时,对应的引脚电平会被拉低到0,因此使用digitalRead(8)函数读取该引脚的值时,会返回0。所以,选项A是正确的。而选项B、C、D描述的电路类型或返回值都是错误的。
18、下列程序执行后,串口监视器中显示的值是?
A、5
B、6
C、7
D、10
解析:【喵呜刷题小喵解析】:从提供的图片中,我们可以看到这是一个串口通信的程序。图片中的数据显示了四个变量A、B、C、D,分别对应了数值5、6、7、10。但我们需要关注的是程序执行后串口监视器中显示的值。由于图片中没有明确显示程序执行的具体结果,我们只能通过题目的描述进行推理。通常,串口监视器会显示通过串口发送或接收的数据。在本题中,最有可能的情况是程序执行后,通过串口发送了某个变量的值。而题目没有提供足够的信息来确定具体发送了哪个变量的值,但我们可以基于常识进行推测。在常见的编程场景中,变量名(如A、B、C、D)通常用于标识不同的数据或信息。而在串口通信中,为了区分不同的数据,常常会在发送数据时附带一些标识信息,如变量的名称。因此,程序执行后,串口监视器可能会显示类似于"A=5"、"B=6"、"C=7"、"D=10"这样的信息。由于题目没有明确说明程序执行后的具体行为,我们只能根据常识进行推测。如果程序执行后发送了变量的值,并且附带了变量的名称,那么最有可能的情况是发送了"C=7"这样的信息。因此,根据题目给出的选项,最符合推测的答案是C,即"7"。需要注意的是,这只是一个基于常识的推测,实际情况可能因具体的程序实现而有所不同。在没有更多信息的情况下,我们只能做出这样的假设。
19、.在程序运行过程中,需要延时 0.5 秒,下列程序正确的是?
A、delay(0.5)
B、delay(5)
C、delay(50)
D、delay(500)
解析:【喵呜刷题小喵解析】题目要求是在程序运行过程中,需要延时0.5秒,因此我们需要找到一个合适的函数或命令来实现这个延时。选项A的"delay(0.5)"似乎是一个合适的选项,但是具体实现方式取决于所使用的编程语言和环境。在某些情况下,直接传入0.5秒作为参数可能并不被接受,因为0.5是一个浮点数,而函数或命令可能只接受整数作为参数。选项B的"delay(5)"和选项C的"delay(50)"可能是以毫秒或某种其他单位作为参数的,但是题目没有给出具体的上下文,所以我们无法确定它们是否适用于0.5秒的延时。选项D的"delay(500)"似乎是以毫秒为单位的延时,即0.5秒(因为1秒等于1000毫秒)。因此,它可能是唯一符合题目要求的选项。然而,请注意,这只是一个基于题目给出的选项的推测。在实际编程中,具体的延时函数或命令可能会因编程语言和环境而异。因此,在编写代码时,我们应该参考所使用的编程语言和库的文档来确定正确的延时函数或命令。
20、通过电机驱动芯片控制直流电机转速变化,常用的主控板引脚是?()
A、数字输入引脚
B、数字输出引脚
C、模拟输入引脚
D、模拟输出引脚
解析:【喵呜刷题小喵解析】:通过电机驱动芯片控制直流电机转速变化,通常是通过改变提供给电机的电压或电流来实现的。在数字控制系统中,这通常是通过PWM(脉宽调制)来实现的,即改变PWM信号的占空比来改变平均输出电压或电流。因此,主控板引脚需要能够输出这种PWM信号。模拟输出引脚可以输出连续变化的信号,非常适合用于输出PWM信号。因此,正确答案是“模拟输出引脚”。其他选项如数字输入、数字输出和模拟输入在此应用场景中可能不适用或不够理想。
二、多选题
21、Arduino 智能小车,以下为闭环控制的案例是?
A、红外遥控小车
B、自动跟随小车
C、循迹小车
D、自主寻光小车
解析:【喵呜刷题小喵解析】:在这个问题中,我们需要找出哪一个或哪些Arduino智能小车案例是闭环控制的。我们来分析每个选项:A. 红外遥控小车:这个选项描述的是一个使用红外遥控来控制的小车,遥控通常是一个开环控制系统,因为它只是发送指令而不关心小车的实际状态。因此,这不是一个闭环控制系统。B. 自动跟随小车:自动跟随小车可能是一个闭环控制系统,因为它会检测目标的位置并调整自己的行驶方向来跟随目标。这种系统通常使用传感器来检测目标的位置,并根据反馈来调整小车的行驶。C. 循迹小车:循迹小车也是一个闭环控制系统,它使用传感器来检测行驶路径(例如,黑色线在白纸上的轨迹),并根据反馈来调整小车的行驶以保持在轨迹上。D. 自主寻光小车:自主寻光小车也是一个闭环控制系统。它使用传感器来检测光源的位置,并根据反馈来调整小车的行驶方向以寻找光源。因此,答案为B、C和D,即自动跟随小车、循迹小车和自主寻光小车。这些选项描述的小车都是闭环控制系统,因为它们都使用传感器来检测外部条件并根据反馈来调整小车的行驶。
22、关于变量下面说法正确的有?
A、变量名的第一个字可以是数字
B、变量名不区分大小写
C、变量名不得和系统的关键字重名
D、变量名称只能包含英文字母、数字和下划线
解析:【喵呜刷题小喵解析】:A选项错误,变量名的第一个字不能是数字,它必须是一个字母。B选项错误,变量名是区分大小写的,例如“myVariable”和“myvariable”是两个不同的变量。C选项正确,变量名不得和系统的关键字重名,这是为了避免混淆和错误。D选项正确,变量名称只能包含英文字母、数字和下划线,这是大多数编程语言的规定。
23、. Arduino UNO/Nano 主控板,下列语句中可实现引脚 3 输出高电平的是?
A、digitalWrite(3,HIGH)
B、digitalWrite(3,1)
C、analogWrite(3,HIGH)
D、analogWrite(3,255)
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板上,要实现引脚3输出高电平,应该使用digitalWrite函数。digitalWrite函数接受两个参数,第一个参数是引脚号,第二个参数是电平值。HIGH表示高电平,LOW表示低电平。因此,选项A的digitalWrite(3,HIGH)是正确的。另外,digitalWrite函数也可以接受1和0作为电平值,其中1代表HIGH,0代表LOW。因此,选项B的digitalWrite(3,1)实际上也会使引脚3输出高电平。选项C的analogWrite函数是用于控制PWM(脉冲宽度调制)输出,用于控制模拟信号的强弱,不适用于直接设置引脚为高电平或低电平,因此C选项是错误的。选项D的analogWrite(3,255)中的255是一个值域在0~255之间的整数,用于控制PWM信号的占空比,也不适用于设置引脚为高电平,因此D选项也是错误的。
24、Arduino UNO/Nano 主控板,数字引脚工作模式有?
A、INPUT
B、OUTPUT
C、INPUT_PULLUP
D、INPUT_PULLDOWN
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板上,数字引脚的工作模式主要有三种:A. INPUT:输入模式,用于读取数字信号。B. OUTPUT:输出模式,用于发送数字信号。C. INPUT_PULLUP:上拉输入模式,当引脚未连接外部设备时,会被内部上拉电阻拉高至高电平。D. INPUT_PULLDOWN:下拉输入模式,当引脚未连接外部设备时,会被内部下拉电阻拉低至低电平。然而,根据题目给出的选项,只有A、B和C是正确的。因此,正确答案是A、B和C。
25、晶体三极管有 3 个引脚,分别是?
A、漏极
B、基极
C、集电极
D、发射极
解析:【喵呜刷题小喵解析】:晶体三极管是电子电路中的重要元件,它具有三个引脚,分别是基极(B)、集电极(C)和发射极(D)。其中,基极用于控制电流,集电极用于收集电流,发射极则提供电流。因此,正确答案是BCD,即基极、集电极和发射极。
三、判断题
26、Arduino UNO/Nano 主控板上 Atmega328P 芯片的工作频率是 16MHz。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:Arduino UNO/Nano 主控板上的 Atmega328P 芯片的工作频率通常是16MHz,这是Arduino标准的工作频率,用于各种操作如计时器、中断等。因此,题目中的说法是正确的。
27、Arduino UNO/Nano 主控板,向计算机发送数据时,Tx 指示灯亮。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,Tx代表发送数据,Rx代表接收数据。当向计算机发送数据时,Tx指示灯会亮起,这是正常的操作指示。因此,题目的陈述是正确的,选项A是正确的。
28、101010 是一个二进制数
A 正确
B 错误
解析:【喵呜刷题小喵解析】:根据二进制数的定义,它只包含0和1两个数字。然而,给出的数字"101010"中包含了数字"0",所以它不是二进制数。因此,答案是B,即错误。
29、NPN 三极管工作在开关状态时,高电平导通。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:NPN三极管在开关状态工作时,当基极电压高于发射极电压与集电结导通电压之和时,三极管导通。此时,集电极与发射极之间相当于短路,三极管处于饱和状态。当基极电压低于发射极电压时,三极管截止,集电极与发射极之间相当于开路。在开关状态工作时,通常是通过控制基极电压来实现三极管从导通到截止的切换,因此高电平(大于导通电压)时三极管导通,低电平(小于截止电压)时三极管截止。故A选项正确。
30、Arduino UNO/Nano 主控板,C 语言程序中整型数占用 2 个字节。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在大多数计算机系统中,整型数(如int)通常占用4个字节。但是,具体的字节大小可能因硬件、编译器和操作系统而异。在特定的嵌入式系统(如Arduino UNO/Nano)上,由于资源有限,可能会采用较小的整型数大小以节省内存。因此,题目中的说法“整型数占用2个字节”可能是针对Arduino UNO/Nano主控板的特定情况。在没有更具体的上下文信息的情况下,我们可以假设这个陈述是正确的。所以,答案为A。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




