



一、单选题
1、2018世界机器人大会举办地点是?
A、北京
B、上海
C、天津
D、深圳
解析:【喵呜刷题小喵解析】:2018世界机器人大会在北京举办。根据题目选项,A选项为北京,B选项为上海,C选项为天津,D选项为深圳。由于问题询问的是举办地点,所以正确答案应为A选项,即北京。
2、截止现在,Deepmind公司研发的围棋程序,水平最高的是?
A、AlphaGO Lee
B、Alpha Master
C、Alpha Zero
D、Alpha Fan
解析:【喵呜刷题小喵解析】:Alpha Zero 是 DeepMind 公司开发的一款围棋程序,被认为是水平最高的围棋AI。它是通过自我对弈进行训练,而不需要人类的棋谱数据,最终在与人类顶尖棋手的对弈中取得了胜利。因此,Alpha Zero 是 DeepMind 公司研发的围棋程序中水平最高的。选项A的AlphaGO Lee,选项B的Alpha Master,以及选项D的Alpha Fan,均不是 DeepMind 公司研发的围棋程序中的最高水平。因此,正确答案为C,即Alpha Zero。
3、整数型、布尔型、字符型、字节型、浮点型变量的描述符排列顺序争取的是?
A、boolean char byte int float
B、float char byte boolean int
C、Int Byte boolean float char
D、int boolean char byte float
解析:【喵呜刷题小喵解析】在常见的编程语言中,如Java,变量的类型顺序通常是按照从小到大的顺序排列的。在这个选项中,int、boolean、char、byte、float的顺序是从小到大排列的,与常见的排列顺序相符。因此,D选项的排列顺序是正确的。其他选项中的排列顺序存在错误或不符合常规。
4、以下四个符号中( )不是逻辑运算符。
A、==
B、&&
C、||
D、!
解析:【喵呜刷题小喵解析】:在提供的选项中,A==、B&&、C||和D!都是逻辑运算符。然而,A==并不是逻辑运算符,而是赋值运算符,用于将右侧的值赋给左侧的变量。逻辑运算符用于基于条件判断的真假值进行逻辑运算。因此,正确答案是A。
5、在程序运行过程中,需要延时0.2秒,下列程序正确的是?
A、delay(0.2);
B、delay(20);
C、delay(200);
D、delay(2000);
解析:【喵呜刷题小喵解析】在程序中,要延时0.2秒,需要根据具体的延时函数来判断应该使用哪个参数。题目中给出的延时函数是`delay(x)`,其中`x`可能是代表时间的参数。根据常识和一般的延时函数用法,延时时间通常以毫秒或微秒为单位。因此,要延时0.2秒,如果`delay(x)`的单位是毫秒,那么应该使用`200`毫秒(因为0.2秒等于200毫秒)。所以,正确的选项是C。其他选项A、B和D中的参数与0.2秒不对应,因此是错误的。
6、在C语言中,关于变量下面说法不正确的是?
A、变量名的第一个字可以是数字
B、变量名区分大小写
C、变量名称只能包含英文字母、数字和下划线
D、变量名不得和系统的关键字重名
解析:【喵呜刷题小喵解析】:在C语言中,关于变量的命名规则有以下几点:A. 变量名的第一个字不可以是数字,只能是字母或下划线。所以A选项的说法是不正确的。B. 变量名区分大小写,这是正确的。例如,变量名“myVar”和“myvar”在C语言中会被视为两个不同的变量。C. 变量名称只能包含英文字母、数字和下划线,这是正确的。在C语言中,变量名不能包含其他字符,如空格、标点符号等。D. 变量名不得和系统的关键字重名,这是正确的。例如,在C语言中,关键字如“int”、“for”等不能用作变量名。综上所述,选项A的说法是不正确的。
7、Arduino C语言中,十六进制数的前缀是?
A、0
B、无前缀
C、0b
D、0x
解析:【喵呜刷题小喵解析】:在Arduino C语言中,十六进制数的前缀是0x。十六进制数是以16为基数的数,由0-9和A-F(或a-f)表示。在C语言中,十六进制数前面通常会有一个0x前缀,以表示这是一个十六进制数。因此,正确答案是0x。
8、程序Serial.print(10, BIN)输出的结果是?
A、1100
B、A
C、10
D、1010
解析:【喵呜刷题小喵解析】在Arduino编程中,`Serial.print()`函数用于在串行监视器上打印数据。当使用`Serial.print(10, BIN)`时,它尝试将数字10以二进制形式打印出来。在二进制中,数字10表示为`1010`,因此`Serial.print(10, BIN)`的输出结果应该是`1010`,所以正确选项是D。选项A的`1100`表示的是8的二进制形式,选项B的`A`表示的是一个字母,选项C的`10`表示的是十进制形式的10,它们都不符合题目要求。
9、下面程序执行后,在串口监视器中显示的值是多少? Setup(){ Serial.begin(9600); int i=10; for( i=0;i<=5;i++){ } Serial.print(i); }
A、10
B、0
C、5
D、6
解析:【喵呜刷题小喵解析】在程序中,首先通过`Serial.begin(9600);`初始化串口通信。然后定义一个整型变量`i`并赋值为10。接着,程序执行一个for循环,循环的条件是`i<=5`,但由于循环体内没有改变`i`的值,所以循环实际上没有执行任何操作。循环结束后,`i`的值仍然是10。最后,通过`Serial.print(i);`将`i`的值打印到串口监视器。因此,程序执行后,在串口监视器中显示的值是10,选项D正确。
10、下面程序执行后,在串口监视器中显示? Setup(){ Serial.begin(9600); float i=5; int j=5; Serial.print(i/2); Serial.print(“ “); Serial.println(j/2); }
A、2.5 2.5
B、2 2.5
C、2.5 2
D、3 3
解析:【喵呜刷题小喵解析】在题目中,程序首先通过`Serial.begin(9600);`初始化串口通信,然后定义了一个浮点数`i`和一个整数`j`,分别赋值为5。接下来,程序使用`Serial.print`函数打印`i/2`和`j/2`的值。由于`i`是浮点数,其除法运算结果为浮点数,因此`i/2`的值为2.5。而`j`是整数,其除法运算结果为整数部分,即`j/2`的值为2。程序通过`Serial.print`函数和`Serial.println`函数分别打印这两个值,并在它们之间添加一个空格。因此,在串口监视器中显示的应该是"2.5 2",选项C与此相符。
11、关于analogRead() 模拟输入函数的返回值,正确的是?
A、1和0
B、0-255之间
C、0-1023之间
D、0-1024之间
解析:【喵呜刷题小喵解析】:在Arduino等微控制器中,analogRead()函数用于读取模拟输入引脚的电压值,并将其转换为数字值。这个数字值通常表示的是模拟输入电压与参考电压(通常为5V或3.3V)的比例。在Arduino Uno等基于ATmega328P的板上,模拟输入的范围是0-5V,对应的数字值范围是0-1023。因此,正确答案是C选项,即0-1023之间。
12、下列程序段执行后k值为? int k=0,i,j; for(i=0;i<5;i++) for(j=0;j<3;j++) k=k+1 ;
A、3
B、5
C、8
D、15
解析:【喵呜刷题小喵解析】本题考查的是循环嵌套的知识。首先,我们分析代码段:```cint k=0,i,j;for(i=0;i<5;i++)for(j=0;j<3;j++)k=k+1;```这里,外层循环i从0到4共5次,内层循环j从0到2共3次。所以整个嵌套循环共执行5*3=15次。然后,我们看每次循环k值的变化。由于每次循环k=k+1,所以k值每次加1。所以,程序执行后,k的值应为0+1+1+1+1+1+1+1+1+1+1+1+1+1+1=15。因此,答案是D选项,即k的值为15。
13、下列哪个选项不属于C语言的循环语句?
A、switch语句
B、while语句
C、do-while语句
D、for语句
解析:【喵呜刷题小喵解析】:C语言的循环语句包括`while`、`do-while`和`for`语句,它们用于重复执行一段代码。而`switch`语句是一种多路选择语句,用于根据表达式的值执行不同的代码块,它不属于循环语句。因此,选项A中的`switch`语句不属于C语言的循环语句。
14、以下有关switch语句的说法正确的是?
A、break语句是switch语句中必需的一部分
B、在switch 语句中可以根据需要使用或不使用break语句
C、break语句在switch 语句中不可以使用
D、在switch 语句中的每一个case都要使用break语句
解析:【喵呜刷题小喵解析】:A. "break语句是switch语句中必需的一部分",这个选项是不正确的。虽然在switch语句中经常使用break语句来确保只执行一个case,但break语句并不是必需的。如果没有break语句,程序会继续执行下一个case,这被称为“fall through”。B. "在switch语句中可以根据需要使用或不使用break语句",这个选项是正确的。在switch语句中,是否使用break语句取决于你的需求。如果你想让程序继续执行下一个case,你可以不使用break语句。C. "break语句在switch语句中不可以使用",这个选项是不正确的。实际上,在switch语句中,break语句经常被用来确保只执行一个case。D. "在switch语句中的每一个case都要使用break语句",这个选项也是不正确的。虽然很多程序员习惯在每个case后面都使用break语句,但这并不是必需的。如果你想让程序继续执行下一个case,你可以不使用break语句。因此,正确答案是B选项。
15、关于循环语句中,break语句描述错误的是?
A、break语句只对包含它的最内层循环语句起作用
B、break语句可以跳出多重循环
C、break语句终止当前循环
D、break语句执行后,程序将跳转到本循环后的第一条语句开始继续执行
解析:【喵呜刷题小喵解析】:A选项描述了break语句只对包含它的最内层循环语句起作用,这是正确的。B选项表示break语句可以跳出多重循环,这是错误的,因为break语句只能终止包含它的最内层循环,而不能直接跳出多重循环。C选项描述了break语句终止当前循环,这是正确的。D选项表示break语句执行后,程序将跳转到本循环后的第一条语句开始继续执行,这也是正确的。因此,B选项描述错误。
16、使用红外传感器库是,红外类库成员函数resume()描述正确的是?
A、串口输出红外按键的返回值编码;
B、清空缓存,接受下一个红外编码;
C、获取当前红外按键的编码值;
D、初始化红外传感器,启动红外接收功能。
解析:【喵呜刷题小喵解析】:根据题目描述,我们需要找到红外类库成员函数resume()的正确描述。选项A描述为“串口输出红外按键的返回值编码”,但题目中并未提及与串口输出相关的信息,因此A选项不正确。选项B描述为“清空缓存,接受下一个红外编码”,这符合红外传感器库中resume()函数通常的功能,即清空之前的接收数据,准备接收下一个红外编码。选项C描述为“获取当前红外按键的编码值”,但题目中并未提及与获取当前编码值相关的信息,因此C选项不正确。选项D描述为“初始化红外传感器,启动红外接收功能”,但通常初始化红外传感器和启动接收功能的函数名不是resume(),因此D选项也不正确。因此,正确答案是B选项。
17、下列程序的返回值是? int angle=90; angle = (angle > 180 ) ? 180 : angle; Serial.println(angle);
A、0
B、90
C、180
D、不确定
解析:【喵呜刷题小喵解析】根据题目中的代码,首先定义了一个整型变量angle,并赋值为90。然后,使用了一个三元运算符(也称为条件运算符)来更新angle的值。这个运算符的语法是 `(condition) ? (value_if_true) : (value_if_false)`。在这个例子中,条件是 `angle > 180`,如果条件为真(即angle大于180),则angle的值会被更新为180,否则angle的值保持不变。由于angle的初始值是90,小于180,所以angle的值不会被更新,保持为90。最后,使用Serial.println函数打印angle的值,因此输出的结果应该是90,选项B正确。
18、语句digitalWrite(3,HIGH),执行的结果是引脚3输出( )伏的电压。
A、0V
B、5V
C、3.5~5V
D、0~1.5V
解析:【喵呜刷题小喵解析】:在Arduino编程中,`digitalWrite()`函数用于设置数字引脚的电平状态。它接受两个参数:引脚编号和电平状态(HIGH或LOW)。当引脚编号是3,电平状态是HIGH时,表示引脚3输出高电平,即5V的电压。因此,答案是B选项,即引脚3输出5V的电压。
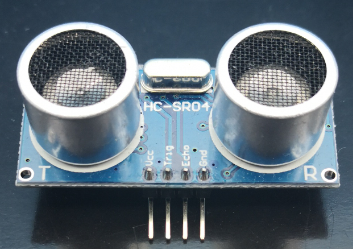
19、超声波传感器,有四个引脚,超声波传感器从哪个引脚接受触发信号,开始工作?

A、VCC
B、Trig
C、Echo
D、GND
解析:【喵呜刷题小喵解析】:根据题目中的图片,超声波传感器有四个引脚,分别是VCC、Trig、Echo和GND。其中,VCC是电源正极,GND是电源负极,Echo是接收超声波返回的信号,而Trig是用于触发超声波传感器开始工作的引脚。因此,超声波传感器从Trig引脚接受触发信号,开始工作。所以正确答案是B。
20、使用电机驱动芯片控制电机速度,常用主控板的引脚是?
A、数字输入引脚
B、数字输出引脚
C、模拟输入引脚
D、模拟输出引脚
解析:【喵呜刷题小喵解析】:在控制电机速度时,通常使用模拟输出引脚(模拟信号)来控制电机驱动芯片。数字输入/输出引脚主要用于数字信号的传输,而模拟输入/输出引脚则用于模拟信号的传输。模拟信号可以表示连续的数值,因此更适合用于控制电机的速度。因此,常用主控板的引脚是模拟输出引脚。
21、电路示意如下,digitalRead(8)的返回值是?

A、0
B、1
C、255
D、1203
解析:【喵呜刷题小喵解析】:根据电路示意图,引脚8通过上拉电阻连接到VCC,因此当引脚8未连接其他设备时,其电平应为高电平,即1。因此,digitalRead(8)的返回值应为1,选项A正确。
22、在纯电阻电路中,根据欧姆定路I=U/R,关于下列说法正确的是?
A、电路中,电流随着两端电压的增大而增大
B、电路中,电流随着两端电压的增大而减小
C、电路中,电阻随着两端电压的增大而减小
D、电路中,电阻随着两端电压的增大而增大
解析:【喵呜刷题小喵解析】在纯电阻电路中,根据欧姆定律I=U/R,电流I与电压U成正比,与电阻R成反比。因此,当电阻R保持不变时,电路中电流I会随着两端电压U的增大而增大。所以选项A正确,选项B、C、D都是错误的。
23、UNO 或 Nano主控板,采用的主控芯片是Atmega 328P,正常工作情况下,其工作频率是?
A、32MHz
B、16MHz
C、8MHz
D、5MHz
解析:【喵呜刷题小喵解析】题目询问的是UNO或Nano主控板正常工作情况下的工作频率。由于题目明确指出,采用的主控芯片是Atmega 328P,我们需要查阅Atmega 328P的相关资料。Atmega 328P是一款常用的8位AVR微控制器,其内部振荡器通常设置为16MHz。这是Atmega 328P的默认工作频率,除非用户进行了特殊的配置。因此,正确答案是16MHz,即选项B。
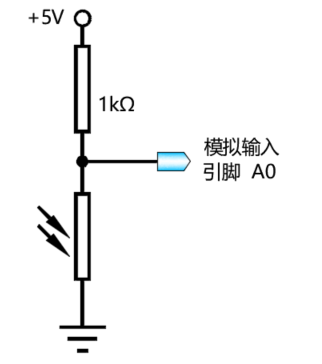
24、电路示意如下,当光照射光敏电阻时,随着光照强度的增强,analogRead(A0)的返回值是?
A、没有变化
B、随着光照强度增大而减小
C、随着光照强度增大而增大
D、无规律变化
解析:【喵呜刷题小喵解析】:光敏电阻是一种光电器件,其电阻值会随着光照强度的变化而变化。当光照强度增强时,光敏电阻的电阻值会减小。在电路示意中,analogRead(A0)函数读取的是模拟输入A0的电压值,这个电压值是由光敏电阻和与其串联的电阻分压得到的。由于光敏电阻的电阻值减小,其分得的电压也会减小,因此analogRead(A0)的返回值会随着光照强度的增大而减小。因此,正确答案是nB。
25、UNO或Nano主板所采用的主控芯片Atmega328P的ADC有多少位精度?
A、255
B、32
C、8
D、10
解析:【喵呜刷题小喵解析】:Atmega328P是一款常用的微控制器芯片,其内置的ADC(模数转换器)的精度通常为10位。因此,正确答案是D选项,即10位精度。
26、关于PWM下面描述错误的是?
A、PWM是通过数字信号实现的模拟输出;
B、PWM是通过调整占空比来实现输出值的变化;
C、占空比是一个脉冲周期内低电平时间所占的比例;
D、PWM等效输出电压值等于占空比乘以高电平值。
解析:【喵呜刷题小喵解析】:本题考查对PWM(脉冲宽度调制)的理解。A选项提到PWM是通过数字信号实现的模拟输出,这是正确的。PWM是一种通过改变脉冲宽度(即高电平时间)来模拟连续电压或电流的技术。B选项提到PWM是通过调整占空比来实现输出值的变化,这也是正确的。占空比是指高电平时间与整个周期时间的比例,通过改变这个比例,可以模拟不同的电压或电流值。C选项说“占空比是一个脉冲周期内低电平时间所占的比例”,这是错误的。占空比实际上是指高电平时间与整个周期时间的比例,而不是低电平时间。D选项提到PWM等效输出电压值等于占空比乘以高电平值,这也是正确的。在PWM中,输出电压或电流的平均值可以通过调整占空比来实现,这个平均值等于占空比乘以高电平值。因此,描述错误的是C选项。
27、如上题图示的超声波传感器,下列关于超声波传感器测距说法错误的有?
A、超声波传感器不直接返回距离值
B、超声波传感器接受触发信号后,发射8个40Khz的方波,并自动检测是否有信号返回
C、超声波通过信号引脚返回低电平,低电平的持续时间是超声波从发射到接收的时间
D、通过pulseIn函数读取超声波传感器的返回的电平信号
解析:【喵呜刷题小喵解析】:根据题目给出的选项和图片信息,我们来逐一分析每个选项:A选项表示超声波传感器不直接返回距离值,这通常是正确的。超声波传感器会返回一种形式的信号,通常是电平信号,需要外部电路或代码进行处理才能计算出距离值。B选项提到超声波传感器接受触发信号后,发射8个40Khz的方波,并自动检测是否有信号返回。这个描述与大多数超声波传感器的工作原理相符,即发送声波并检测返回的声波。D选项表示通过pulseIn函数读取超声波传感器的返回的电平信号,这也是正确的。许多微控制器和编程环境都提供了读取电平信号的功能,如Arduino的pulseIn函数。C选项表示超声波通过信号引脚返回低电平,低电平的持续时间是超声波从发射到接收的时间。这个描述是不准确的。超声波传感器返回的信号通常是一个电平变化,而不是持续的低电平。当超声波从发射到接收时,返回的信号通常是一个高电平脉冲,其宽度与超声波的飞行时间成正比。因此,C选项的描述是错误的。
28、引脚3为模拟输出引脚,将LED灯阳极连接到该引脚,阴极串联220欧姆电阻后连接到GND,程序analogWrite(3,256)执行,下列描述正确的是?
A、LED灯熄灭
B、LED灯最亮
C、LED灯亮度在最亮和熄灭之间不断变化
D、LED灯处于四分之一亮度状态
解析:【喵呜刷题小喵解析】引脚3为模拟输出引脚,将LED灯阳极连接到该引脚,阴极串联220欧姆电阻后连接到GND,程序analogWrite(3,256)执行。由于analogWrite函数的参数256是最大值,所以LED灯应该熄灭。这是因为analogWrite函数用于设置模拟输出引脚的占空比,从而控制LED的亮度。当参数为256时,占空比达到最大值,此时LED应该熄灭。因此,答案是A,即LED灯熄灭。
29、超声波传感器工作需要向触发引脚发送10us的高电平,触发引脚连接在主控板2引脚,以下触发程序正确的是?

A、digitalWrite(2,LOW);
delay(2);
digitalWrite(2,HIGH);
delay(10);
digitalWrite(2,LOW);
B、digitalWrite(2,LOW); delayMicroseconds(2); digitalWrite(2,HIGH); delayMicroseconds(10); digitalWrite(2,LOW);
C、digitalWrite(2,HIGH); delay(10); digitalWrite(2,LOW);
D、digitalWrite(2,HIGH); delayMicroseconds(10); digitalWrite(2,LOW);
解析:【喵呜刷题小喵解析】超声波传感器工作需要向触发引脚发送10us的高电平,根据给出的程序选项,A选项中`delay(2);`和`delay(10);`的延时单位是毫秒,不满足10us的要求;C选项中`delay(10);`的延时单位是毫秒,也不满足10us的要求;D选项中`delayMicroseconds(10);`的延时单位是微秒,但前面的`digitalWrite(2,HIGH);`没有将引脚设为高电平,所以也不正确。只有B选项中的`delayMicroseconds(2);`和`delayMicroseconds(10);`的延时单位是微秒,且`digitalWrite(2,HIGH);`将引脚设为高电平,满足题目要求。因此,正确答案是B。
30、通过电位控制舵机的转动角度,部分程序如下,当电位器的返回值为0时,舵机的角度位置为? int potVal = analogRead(A0); potVal = map(potVal,1023,0,135,45); myServo.write(potVal);
A、0
B、180
C、135
D、45
解析:【喵呜刷题小喵解析】题目中的程序是将电位器的模拟值(0-1023)映射到舵机的角度(135-45)。程序中的 `map` 函数用于将电位器的返回值从 0 到 1023 映射到 135 到 45。当电位器的返回值为 0 时,`map` 函数会返回 45,这是舵机的最小角度。因此,当电位器的返回值为 0 时,舵机的角度位置为 45,选项 D 是正确的。
二、多选题
31、C语言程序设计的基本结构有?
A、顺序结构
B、选择结构
C、循环结构
D、逆序结构
解析:【喵呜刷题小喵解析】:在C语言程序设计中,基本结构主要包括顺序结构、选择结构和循环结构。顺序结构是指按照代码的先后顺序依次执行;选择结构则根据条件判断执行不同的代码块;循环结构则是重复执行某段代码,直到满足特定条件。而逆序结构并不是C语言程序设计的基本结构之一,因此不应选择。因此,正确答案为A、B、C。
32、Arduino类库从安装方式,可分为哪几类?
A、核心库
B、软件安装自带库
C、外部库
D、内部库
解析:【喵呜刷题小喵解析】:Arduino类库从安装方式可分为核心库、软件安装自带库和外部库。核心库是Arduino开发板自带的库,是Arduino系统的基础库;软件安装自带库是用户在安装Arduino IDE(集成开发环境)时一同安装的库;外部库则是由第三方开发者开发,用户需要从网上下载并安装的库。内部库并不是Arduino类库的分类方式,所以D选项不正确。因此,正确答案为A、B、C。
33、关于光敏电阻,描述正确的是?
A、随着光照强度的增大,阻值变小;
B、随着光照强度的增大,阻值变大;
C、光敏电阻是利用半导体材料的光电效应制成的电阻器;
D、随着光照强度的增大,阻值随机变化。
解析:【喵呜刷题小喵解析】:光敏电阻是一种利用半导体材料的光电效应制成的电阻器。当光照强度增大时,光敏电阻的阻值会变小。这是因为光敏电阻的阻值会随着光照强度的变化而变化,这是其特性之一。因此,选项nA和nC是正确的描述。选项nB是错误的,因为随着光照强度的增大,阻值会变小,而不是变大。选项nD也是错误的,因为阻值的变化是有规律的,不是随机的。
34、晶体三极管有3个引脚,分别是?
A、基极
B、集电极
C、发射集
D、阴极
解析:【喵呜刷题小喵解析】:晶体三极管有三个引脚,分别是基极、集电极和发射极。基极通常用字母B表示,集电极用字母C表示,发射极用字母E表示。题目中给出的选项有A基极、B集电极、C发射集和D阴极,其中C选项的“发射集”应为“发射极”,D选项的“阴极”并不是晶体三极管的一个引脚,因此正确答案应为A、B、C。
35、在UNO 或Nano主控板中,当引脚作为数字引脚使用时,引脚的工作模式有哪些?
A、INPUT数字信号输入模式
B、OUTPUT数字信号输出模式
C、INPUT_PULLUP内部上拉数字信号输入模式
D、HIGH/LOW高低电平输入模式
解析:【喵呜刷题小喵解析】:在UNO或Nano主控板中,当引脚作为数字引脚使用时,其工作模式主要有数字信号输入模式、数字信号输出模式以及内部上拉数字信号输入模式。高低电平输入模式并非标准的工作模式,所以选项D是不正确的。因此,正确答案应选ABC。
三、判断题
36、111110可能是一个二进制数。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:二进制数是由0和1组成的数字,而111110正好是由0和1组成,所以它是一个二进制数。因此,题目给出的判断是正确的。
37、当系统通电或复位重启时,setup()函数内的程序代码循环运行。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在Arduino编程中,`setup()`函数只会在系统通电或复位重启时运行一次,而不是循环运行。`loop()`函数是Arduino程序的主要部分,它会不断地循环执行。因此,题目中的说法是错误的。
38、自律型移动机器人的三要素是:感知、动作与结构、智能。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:自律型移动机器人是一种能够自主进行导航、感知环境并作出相应动作的机器人。它具备感知、动作与结构、智能三个要素。感知是指机器人通过传感器等装置获取周围环境的信息;动作与结构是指机器人根据感知到的信息,通过自身的机械结构进行移动和操作;智能则是指机器人具备学习和决策的能力,能够根据经验调整自己的行为。因此,题目中的说法是正确的。
39、十进制数3转化为二进制数为10。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:十进制数3转化为二进制数,我们需要将3除以2,得到商和余数,然后将商继续除以2,如此反复,直到商为0为止。按照这个过程,我们可以得到3的二进制表示为11,而不是10。因此,题目中的说法是错误的。
40、Ardunio 主控板MCU内部0和1是通过高低电平来表示。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在Arduino等微控制器(MCU)中,内部的逻辑电平通常是通过高低电平来表示的。高电平通常代表1,低电平代表0。这种表示方式在数字电路中非常常见,用于表示不同的逻辑状态。因此,题目中的说法是正确的。
41、自定义函数可以没有返回值。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在编程中,自定义函数可以没有返回值,这取决于函数的具体需求和设计。有些函数执行特定的操作,但不返回任何值,这种函数通常被称为“无返回值函数”或“void函数”。因此,该题目判断正确。
42、能用for循环实现的程序也完全可以使用if语句来实现。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:虽然if语句和for循环都是编程中常用的控制结构,但它们的功能和用途是不同的。for循环用于重复执行一段代码,通常用于遍历数组或集合中的元素,而if语句则用于根据条件执行不同的代码块。因此,并不是所有的for循环程序都可以用if语句来实现。所以,这个判断题的答案是错误的。
43、switch语句实现的是分支结构。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在大多数编程语言中,switch语句用于实现多路分支结构,根据表达式的值跳转到不同的代码块执行。因此,题目中的说法“switch语句实现的是分支结构”是正确的。
44、x=x+1;可以简写为x+=1;或者x++;
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在C语言(以及其他许多编程语言)中,`x=x+1;`可以简写为`x+=1;`或者`x++;`。`x+=1;`是复合赋值运算符,表示将`x`的值增加1,并将结果赋值给`x`。而`x++;`是后置自增运算符,表示将`x`的值增加1,但返回的是`x`增加之前的值。因此,题目中的说法是正确的。
45、Arduino C语言中,非零值均代表True。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在C语言中,非零值通常被视为True,零值被视为False。在Arduino C语言中,这种规则同样适用。因此,非零值确实代表True,所以答案是A。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




