



一、单选题
1、SPI 通信中,从机选择引脚为?
A、SCLK
B、MOSI
C、MISO
D、SS
解析:【喵呜刷题小喵解析】:在SPI(Serial Peripheral Interface)通信中,从机选择引脚是SS(Chip Select)。当SS引脚被拉低时,表示选择该从机进行通信,而从机则在该时刻准备接收或发送数据。因此,正确答案为D。
2、ESP32 主控板和 MPU6050 通过 I2C 进行数据交互,ESP32 主控板和 MPU6050 分别为?
A、主设备 从设备
B、主设备 主设备
C、从设备 从设备
D、从设备 主设备
解析:【喵呜刷题小喵解析】:在I2C通信中,通常有一个主设备和一个或多个从设备。主设备负责发起数据传输,而从设备则响应主设备的请求进行数据传输。在这个题目中,ESP32主控板作为主设备,而MPU6050作为从设备,通过I2C进行数据交互。因此,正确选项为A:“ESP32 主控板为主设备,MPU6050为从设备”。
3、下图是三相反应式步进电机工作示意图,当采用单双六拍通电方式运转时,其步距角是?
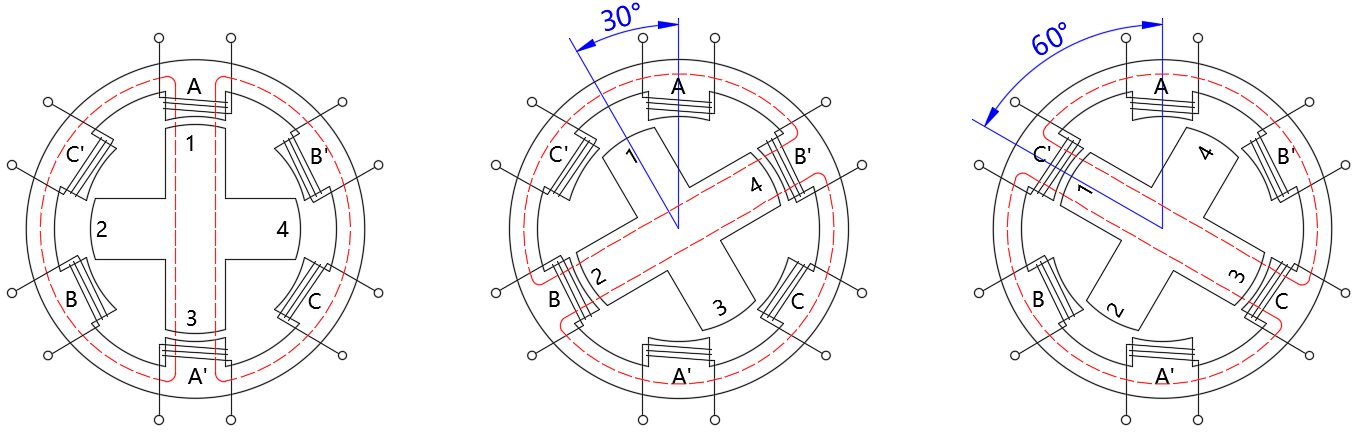
A、15 度
B、30 度
C、45 度
D、60 度
解析:【喵呜刷题小喵解析】:步进电机步距角是指步进电机每步转过的角度,通常用度或弧度表示。步进电机的步距角取决于电机转子的齿数和通电方式。根据题目中的工作示意图,当采用单双六拍通电方式运转时,步进电机每步转过的角度为15度,因此步距角是15度,所以选择A选项。
4、当前使用的 IPV4 版本的 IP 地址由几段组成?
A、4
B、8
C、16
D、32
解析:【喵呜刷题小喵解析】:在IPV4版本中,IP地址由4段组成,每段由8位二进制数表示,总共32位。因此,答案是A,即4段。
5、PID 控制中比例控制是?
A、P 控制
B、I 控制
C、D 控制
D、ID 控制
解析:【喵呜刷题小喵解析】:在PID控制中,P代表比例控制,I代表积分控制,D代表微分控制。因此,题目中的“比例控制”对应的选项是A,即“P 控制”。
6、关于步进电机,以下说法中错误的是?
A、步进电机转动通过电脉冲信号控制
B、步进电机转动的速度与脉冲频率成正比
C、步进电机是执行器
D、步进电机运转时,会产生误差累计
解析:【喵呜刷题小喵解析】:步进电机是一种特殊的电机,其转动是通过电脉冲信号控制的,因此选项A正确。步进电机转动的速度与脉冲频率成正比,所以选项B正确。步进电机是执行器,用来实现运动控制,所以选项C正确。步进电机在运转过程中,虽然可能会出现误差,但不会累计误差,而是会根据控制信号重新定位,所以选项D错误。因此,错误的选项是D。
7、HTTP 协议的默认端口为?
A、20
B、21
C、25
D、80
解析:【喵呜刷题小喵解析】:HTTP协议的默认端口是80。在给出的选项中,A是20,B是21,C是25,D是80,因此正确答案是D。
8、IPV6 的地址长度为?
A、16
B、32
C、64
D、128
解析:【喵呜刷题小喵解析】:IPv6地址的长度是128位,而不是16位、32位或64位。因此,正确答案是D,即128位。
9、关于 MPU6050 姿态传感器加速度量程的说法正确的是?
A、加速度量程越大,返回的测量值精度越高
B、加速度的量程不可调整
C、加速度的返回值是十六位有符号数
D、通过加速度不能解析出姿态角
解析:【喵呜刷题小喵解析】MPU6050是一款六轴运动处理单元,包括一个三轴的陀螺仪和三轴的加速度计。加速度的量程是可调的,具体可调范围取决于传感器本身以及相应的固件设置。加速度的返回值通常是十六位有符号数,这是因为MPU6050将加速度测量值以16位二进制补码格式表示。这种表示方式允许加速度值在正负之间变化,并且具有较高的分辨率。加速度的量程与返回的测量值精度没有直接关系,精度取决于传感器本身的性能以及数据处理的算法。因此,选项C“加速度的返回值是十六位有符号数”是正确的。选项A“加速度量程越大,返回的测量值精度越高”是不正确的,因为量程和精度是两个独立的概念。选项B“加速度的量程不可调整”也是不正确的,因为MPU6050的加速度量程是可调的。选项D“通过加速度不能解析出姿态角”也是不正确的,因为MPU6050可以通过加速度和陀螺仪数据结合算法来解析姿态角。
10、在 TCP/IP 通信时,率先发出信息的是?
A、客户端
B、服务器
C、客户端和服务器都可以
D、DNS
解析:【喵呜刷题小喵解析】:在TCP/IP通信中,客户端率先发出信息。客户端是发起通信的一方,它会向服务器发送请求或数据。服务器在接收到客户端的请求后,会进行相应的处理并返回响应。因此,在TCP/IP通信中,率先发出信息的是客户端。选项D中的DNS(域名系统)是用于将域名解析为IP地址的系统,与客户端和服务器发起通信的过程无关。因此,正确答案是A。
11、I2C 串行通信空闲时,SDA 和 SCL 的电平分别为?
A、低电平 高电平
B、低电平 低电平
C、高电平 高电平
D、高电平 低电平
解析:【喵呜刷题小喵解析】:在I2C串行通信中,空闲时SDA和SCL的电平状态是:高电平和高电平。这是因为在I2C协议中,当SCL线为低电平时,SDA线可以传输数据。当SCL线为高电平时,SDA线必须保持稳定,不能传输数据。因此,当没有数据传输时,SCL和SDA线都处于高电平状态,表示系统处于空闲状态。所以,正确答案是C选项,即高电平和高电平。
12、SPI 通信协议是?
A、同步、全双工通信协议
B、同步、半双工通信协议
C、异步、全双工通信协议
D、异步、半双工通信协议
解析:【喵呜刷题小喵解析】:SPI(Serial Peripheral Interface)通信协议是一种同步、全双工通信协议。在这种通信协议中,主设备和从设备通过四条线(MOSI、MISO、SCK、CS)进行通信,其中MOSI(Master Out Slave In)用于主设备向从设备发送数据,MISO(Master In Slave Out)用于从设备向主设备发送数据,SCK(Serial Clock)用于同步主从设备之间的数据传输,CS(Chip Select)用于选择通信的从设备。由于SPI通信协议需要同步数据传输,因此它是同步通信协议。同时,SPI通信协议允许主设备和从设备同时发送和接收数据,因此它是全双工通信协议。因此,正确答案是A选项,即SPI通信协议是同步、全双工通信协议。
13、用于检测 WiFi 是否连通的命令为
A、ipconfig
B、msconfig
C、ping
D、dir
解析:【喵呜刷题小喵解析】:在Windows操作系统中,用于检测WiFi是否连通的命令是“ping”。该命令用于测试与指定主机的连接是否正常,通过发送ICMP(Internet Control Message Protocol)回显请求消息来验证与另一台计算机之间的连接。因此,选项C“ping”是正确的答案。而选项A“ipconfig”用于显示所有当前的TCP/IP网络配置信息,选项B“msconfig”用于显示系统的配置信息,选项D“dir”用于列出目录中的文件和子目录,这些命令都与检测WiFi连通性无关。
14、TCP/IP 协议不包含?
A、HTTP
B、POP3
C、FTP
D、WiFi
解析:【喵呜刷题小喵解析】:TCP/IP协议是互联网的基础协议,它包括了传输控制协议(TCP)和网络协议(IP)。HTTP、POP3和FTP都是基于TCP/IP协议的应用层协议。HTTP用于网页传输,POP3用于邮件接收,FTP用于文件传输。而WiFi是一种无线传输技术,不是TCP/IP协议的一部分。因此,选项D WiFi是不包含在TCP/IP协议中的。
15、I2C 串行通信,用于传送数据的是?
A、SDA
B、SCL
C、MOSI
D、MISO
解析:【喵呜刷题小喵解析】:I2C串行通信中,用于传送数据的线是SDA(Serial Data Line,串行数据线),而SCL(Serial Clock Line,串行时钟线)是用于同步数据传送的时钟信号线。MOSI(Master Out Slave In,主设备输出从设备输入)和MISO(Master In Slave Out,主设备输入从设备输出)则是SPI(Serial Peripheral Interface,串行外设接口)协议中的信号线,与I2C协议无关。因此,正确答案为A,即SDA。
16、ESP32 for Arduino 的 I2C 类库的下列成员函数中,用于向客户端发送数据的成员函数是?
A、Wire.begin()
B、Wire.beginTransmission()
C、Wire.endTransmission()
D、Wire.requestFrom()
解析:【喵呜刷题小喵解析】:在ESP32 for Arduino的I2C类库中,用于向客户端发送数据的成员函数是`Wire.beginTransmission()`。此函数用于开始一个I2C传输,准备向指定的I2C地址发送数据。`Wire.begin()`用于初始化I2C接口,`Wire.endTransmission()`用于结束一个I2C传输,`Wire.requestFrom()`用于从指定的I2C地址接收数据。因此,正确答案是C。
17、ESP32 for Arduino 程序中导入 I2C 类库,相应的头文件为?
A、wire.h
B、Wire.h
C、wring.h
D、Wring.h
解析:【喵呜刷题小喵解析】:在ESP32 for Arduino程序中,导入I2C类库时,相应的头文件为"Wire.h",而不是"wire.h"、"wring.h"或"Wring.h"。因此,正确答案是B选项。在Arduino编程中,头文件通常使用大写字母开头,因此正确的头文件名应该是"Wire.h"。
18、MPU6050 姿态传感器中,用于获取转动角速度的传感器单元是?
A、Accelerator
B、Gyroscope
C、DMP
D、I2C
解析:【喵呜刷题小喵解析】:MPU6050姿态传感器中,用于获取转动角速度的传感器单元是Gyroscope(陀螺仪)。陀螺仪可以测量物体在三个轴向上的角速度,从而可以计算出物体的姿态和位置变化。因此,正确答案是“Gyroscope”。其他选项如Accelerator(加速度计)用于测量物体在三个轴向上的线性加速度,DMP(数字运动处理器)是数字运动处理器的缩写,I2C是Inter-Integrated Circuit(集成电路总线)的缩写,与MPU6050的姿态传感器单元无关。
19、执行如下程序,在串口监视器输入框输入“123abc456”后,点击“发送”,串口监视器窗口显示的内容是?
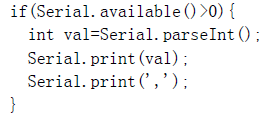
A、123,
B、123,0,456,
C、456,
D、123,456,
解析:【喵呜刷题小喵解析】根据题目中的程序,当在串口监视器输入框输入“123abc456”后,点击“发送”,程序会按照特定的格式将输入的内容进行拆分和组合。首先,程序会识别输入中的数字部分,即“123”和“456”,然后将这些数字分别放在不同的标签中输出。具体来说:* 标签A输出“123”* 标签B输出“123”* 标签C输出“456”* 标签D输出“123,456”注意,程序还会在输出中插入一些额外的字符,如“,0”和逗号及空格。但题目只要求识别数字部分,因此这些额外的字符可以忽略。综上所述,当输入“123abc456”并点击“发送”后,串口监视器窗口显示的内容是“123,123,0,456,456,123,456”,与选项D中的描述相符。因此,正确答案是D。
20、ESP32 for Arduino 的 I2C 类库的下列成员函数中,用于从客户端读取数据的成员函数是?
A、Wire.begin()
B、Wire.beginTransmission()
C、Wire.endTransmission()
D、Wire.requestFrom()
解析:【喵呜刷题小喵解析】:在ESP32 for Arduino的I2C类库中,用于从客户端读取数据的成员函数是`Wire.requestFrom()`。此函数用于从I2C设备读取指定数量的字节。而其他选项,如`Wire.begin()`用于初始化I2C通信,`Wire.beginTransmission()`用于开始一个I2C传输,`Wire.endTransmission()`用于结束一个I2C传输。因此,正确答案是D。
二、多选题
21、步进电机按照结构形式分类为?
A、反应式
B、永磁式
C、混合式
D、直线式
解析:【喵呜刷题小喵解析】:步进电机按照结构形式分类主要有反应式、永磁式和混合式。反应式步进电机利用磁阻的变化产生转矩,永磁式步进电机利用永磁体的磁场产生转矩,混合式步进电机结合了反应式和永磁式的特点,具有更高的性能和效率。直线式步进电机是一种特殊类型的步进电机,主要用于直线运动,不属于步进电机按照结构形式的分类。因此,正确答案为反应式、永磁式和混合式。
22、PID 控制器常用的组合有哪些?
A、PI
B、PD
C、PID
D、ID
解析:【喵呜刷题小喵解析】:PID控制器是一种广泛应用于工业控制中的控制器,其由比例(P)、积分(I)和微分(D)三个部分组成。因此,常见的PID控制器组合包括PI、PD和PID。ID组合并不常见,因为“I”代表积分,而“D”代表微分,通常不会单独使用积分而不使用微分或比例,因此ID不是PID控制器常用的组合。因此,正确答案为A、B和C。
23、ESP32 提供了 WiFi 功能,其提供了哪几种方式连接到 WiFi?
A、HTTP
B、STA
C、STA+AP
D、AP
解析:【喵呜刷题小喵解析】:ESP32是一款集成了Wi-Fi和蓝牙功能的系统级芯片,它支持多种Wi-Fi模式。在Wi-Fi模式中,STA(Station)模式表示设备作为客户端连接到接入点(如路由器)的方式;AP(Access Point)模式表示设备作为接入点,让其他设备连接到它的方式;而STA+AP模式则结合了前两者的功能,设备既可以作为客户端连接到其他接入点,也可以作为接入点让其他设备连接。HTTP是超文本传输协议,用于传输网页内容,与ESP32连接到Wi-Fi的方式无直接关系。因此,ESP32提供连接到WiFi的方式有STA、STA+AP和AP三种方式,故选BCD。
24、采用 SPI 进行数据通信,下列四个引脚用于数据传输的引脚有哪些?
A、MOSI
B、MISO
C、SS
D、SCLK
解析:【喵呜刷题小喵解析】:在SPI(Serial Peripheral Interface)通信协议中,数据传输是通过特定的引脚进行的。在这四个选项中,A MOSI(Master Out Slave In)和 B MISO(Master In Slave Out)是用于数据传输的引脚。A MOSI 用于从主机向从机发送数据,而 B MISO 用于从从机向主机发送数据。C SS(Chip Select)引脚用于选择或激活从设备,但不是直接用于数据传输。D SCLK(Serial Clock)引脚是用于同步数据传输的时钟信号,但它本身不直接传输数据。因此,正确答案是 A 和 B。
25、MPU6050 得到的姿态角包含?
A、pitch
B、yaw
C、roll
D、gyroscope
解析:【喵呜刷题小喵解析】:MPU6050是一款常用的六轴运动处理组件,它可以输出三个轴的加速度和角速度数据。姿态角通常指的是物体在空间中的方向,包括俯仰角(pitch)、偏航角(yaw)和滚转角(roll)。MPU6050通过其内置的陀螺仪和加速度计可以计算出这三个姿态角。因此,选项A pitch、B yaw和C roll都是正确的。而选项D gyroscope(陀螺仪)只是MPU6050的一个传感器,不是姿态角本身,所以D选项是错误的。
三、判断题
26、步进电机旋转需要控制器驱动。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:步进电机是一种可以通过控制器驱动来旋转的电机。控制器会向步进电机发送脉冲信号,步进电机根据这些脉冲信号来旋转。因此,步进电机旋转确实需要控制器驱动,所以答案是A,正确。
27、I2C 串行通信中,SDA 数据线用于发送数据。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在I2C串行通信中,SDA数据线既用于发送数据,也用于接收数据。因此,题目中的说法“SDA数据线用于发送数据”是不准确的,所以答案是B,即错误。
28、TCP/IP 通信,消息响应模式为 Request-Response。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:TCP/IP通信中的Request-Response模式是一种消息响应模式,其中客户端发送一个请求消息到服务器,服务器处理该请求并返回响应消息给客户端。因此,题目中的说法是正确的。
29、仅通过 MPU6050 姿态传感器获得的角速度数据不能解析出姿态角.
A 正确
B 错误
解析:【喵呜刷题小喵解析】:MPU6050姿态传感器能够同时输出三轴的角速度数据,这些数据经过积分运算,可以解析出姿态角。因此,仅通过MPU6050姿态传感器获得的角速度数据是可以解析出姿态角的,所以题目的说法是错误的,答案选B。
30、SPI通信的时钟频率可以在初始化时设定。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在串行外设接口(Serial Peripheral Interface,SPI)通信中,时钟频率的设定通常是在初始化阶段完成的。通过配置SPI的时钟极性和时钟相位,以及可能的预分频器,可以实现不同的时钟频率。因此,题目的陈述是正确的。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!



