



一、单选题
1、关于电路中的三个基本物理量说法正确的是?
A、一节普通 5 号电池的电压大概是 100v
B、中国家用电压是 220v
C、人体安全电压是 1.5v
D、高压线的电压大概是 20v
解析:【喵呜刷题小喵解析】:一节普通5号电池的电压大概是1.5V,不是100V,所以A选项错误。中国家用电压是220V,所以B选项正确。人体安全电压是不高于36V,不是1.5V,所以C选项错误。高压线的电压很高,通常远高于20V,所以D选项错误。因此,正确答案是B。
2、下列关于滑杆机构运动方式说法错误的是?( )
A、滑杆一定不动
B、滑杆绕固定轴转动
C、滑块从动
D、回转体作回转运动
解析:【喵呜刷题小喵解析】:滑杆机构中,滑杆并不是一定不动的。滑杆机构通常包括滑杆和滑块,滑杆可以绕固定轴转动,而滑块则沿着滑杆做往复运动。因此,选项A“滑杆一定不动”的说法是错误的。选项B“滑杆绕固定轴转动”是正确的描述。选项C“滑块从动”也符合滑杆机构的特点,滑块的运动是由滑杆的运动决定的。选项D“回转体作回转运动”在某些滑杆机构中也可能出现,但不是所有滑杆机构都有回转体作回转运动,因此不是错误的说法。
3、伯努利定理是指物体表面流体流速越快那么物体所受的压强越小,该原理可以解释下列哪个现象
A、向靠近的且相互平行的两张纸中间吹气,两张纸往里合
B、吹风扇时人会感到凉爽
C、冬天在屋里向玻璃上哈气会在玻璃上形成小水滴
D、对一个物体施力,可能会改变物体的运动轨迹
解析:【喵呜刷题小喵解析】伯努利定理指出,物体表面流体流速越快,物体所受的压强越小。A选项描述的是向靠近的且相互平行的两张纸中间吹气,两张纸往里合的现象,这正是由于吹气使得两张纸之间的空气流速加快,压强减小,从而产生了纸张往里合的效果。B选项描述的是吹风扇时人会感到凉爽,这是由于风扇吹出的风带走了人体表面的热量,与伯努利定理无关。C选项描述的是冬天在屋里向玻璃上哈气会在玻璃上形成小水滴,这是由于哈出的气体中含有水蒸气,遇冷凝结成水滴,与伯努利定理无关。D选项描述的是对一个物体施力,可能会改变物体的运动轨迹,这是力学的基本原理,与伯努利定理无关。因此,正确答案是A选项。
4、凸轮按形状分类,不包括?
A、盘形凸轮
B、移动凸轮
C、尖顶凸轮
D、圆柱凸轮
解析:【喵呜刷题小喵解析】:凸轮按形状分类,通常包括盘形凸轮、移动凸轮和圆柱凸轮。盘形凸轮的形状为圆盘,移动凸轮是沿某一方向直线移动,而圆柱凸轮则是圆柱形。而尖顶凸轮并不属于常见的凸轮形状分类,因此选项C“尖顶凸轮”是不包括在凸轮按形状分类中的。
5、24.下列凸轮机构是几何锁合的是?
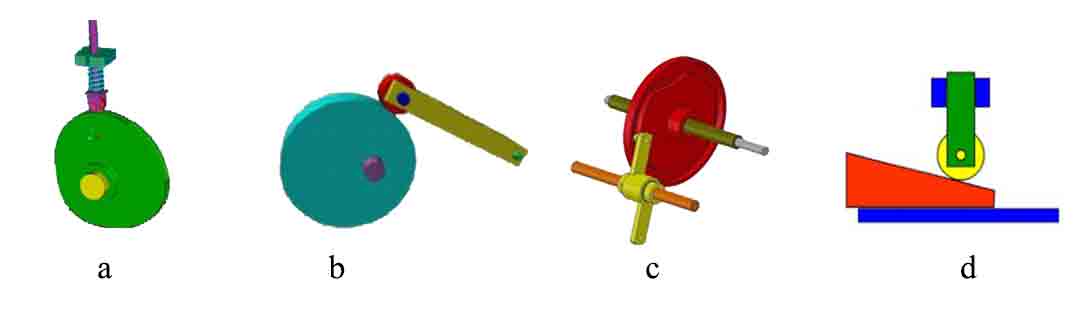
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】:题目中的凸轮机构图未给出,但根据选项,我们需要判断哪一个选项是几何锁合的凸轮机构。几何锁合凸轮机构的特点是,当凸轮与从动件接触时,它们之间的相对位置始终保持不变。这种机构常用于需要精确控制从动件运动轨迹的场合。选项C所描述的凸轮机构很可能是几何锁合的,因为它符合几何锁合的特点。而其他选项(A、B、D)所描述的凸轮机构则可能是其他类型的凸轮机构,如力锁合凸轮机构或高副凸轮机构。因此,正确答案是C。然而,请注意,由于题目中未给出具体的凸轮机构图,以上解析仅基于选项的描述进行推测。在实际情况中,需要具体查看凸轮机构图来确定其类型。
6、我们常用到的5号电池,它的电压是?( )
A、1.5V
B、3V
C、36V
D、220V
解析:【喵呜刷题小喵解析】:我们常用的5号电池电压是1.5V。这是电池的标准电压,用于各种需要小电流供电的设备,如遥控器、手电筒等。因此,正确答案是1.5V,对应选项A。其他选项如3V、36V和220V都不是5号电池的电压。
7、如图,下列哪个凸轮机构采用了平底型从动件?( )

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】从图片中可以看到四个不同的凸轮机构,每个机构都配有一个从动件。平底型从动件的特点是它的底部是平的,没有弧度。观察选项中的四个从动件,我们可以发现选项C的从动件底部是平的,符合平底型从动件的特点。因此,正确答案是C。
8、如图,a齿轮是主动轮,d齿轮是输出轮,两齿轮齿数相等,则该齿轮组的传动比为?

A、1:1
B、1:3
C、2:1
D、1:2
解析:【喵呜刷题小喵解析】:根据齿轮传动的原理,当两个齿轮齿数相等时,它们的传动比为1:1。主动轮a和输出轮d齿数相等,因此它们的传动比为1:1。所以正确选项为A。
9、关于电动机能量转化说法正确的是?
A、电能转化为机械能
B、动能转化为势能
C、势能转化为动能
D、机械能转化为电能
解析:【喵呜刷题小喵解析】电动机是将电能转化为机械能的装置。在电动机工作时,通过电磁感应或磁场作用,输入的电能被转化为机械能,从而驱动机械部件运动。因此,选项A“电能转化为机械能”是正确的说法。选项B、C、D中的动能、势能、机械能与电能的转化与电动机的工作原理不符,因此是错误的。
10、近代机器人先后演进了三代,第三代机器人被称为?
A、编程机器人
B、示教再现型机器人
C、智能机器人
D、广义机器人
解析:【喵呜刷题小喵解析】:题目中提到近代机器人先后演进了三代,而第三代机器人被称为“智能机器人”。选项A“编程机器人”可能是某种类型的机器人,但题目中并没有特别指出它是第三代机器人的名称。选项B“示教再现型机器人”可能是第一代或第二代机器人的类型,但同样没有明确指出是第三代机器人的名称。选项D“广义机器人”是一个较为宽泛的概念,没有明确指出是第三代机器人的名称。因此,正确答案是选项C“智能机器人”。
11、关于重力说法正确的是?( )
A、方向竖直向上
B、方向不能确定
C、一个苹果和一个西瓜的重力大小相等
D、作用点是在物体的重心
解析:【喵呜刷题小喵解析】重力的方向是竖直向下的,所以选项A错误。重力的方向对于每一个物体都是确定的,所以选项B错误。一个苹果和一个西瓜的质量不同,所以它们受到的重力大小也不同,选项C错误。重力的作用点叫做重心,对于形状规则、质量分布均匀的物体,其重心在物体的几何中心上,所以选项D正确。
12、一辆八轮装甲车,左侧四个轮子转速是200rpm,右侧四个轮子转速是100rpm,则此装甲车?
A、向前直走
B、向左前方转向
C、向右前方转向
D、原地不动
解析:【喵呜刷题小喵解析】:装甲车左侧四个轮子转速是200rpm,右侧四个轮子转速是100rpm,转速不同,因此装甲车会向右前方转向。所以正确答案是C。
13、如图这是什么机构?( )

A、平行双曲柄机构
B、反向双曲柄机构
C、曲柄摇杆机构
D、双摇杆机构
解析:【喵呜刷题小喵解析】:根据提供的图片,这个机构具有两个平行的曲柄,因此属于平行双曲柄机构。这种机构常用于实现特定的工作循环或往复运动,其运动特点是两个曲柄在同一平面上做同向转动,而与之相连的连杆则进行相应的往复运动。因此,正确答案是A,即平行双曲柄机构。
14、凸轮按形状分类,不包括?( )
A、盘形凸轮
B、移动凸轮
C、尖顶凸轮
D、圆柱凸轮
解析:【喵呜刷题小喵解析】:凸轮按形状分类,主要有盘形凸轮、移动凸轮和圆柱凸轮。尖顶凸轮并不属于凸轮的常见分类。因此,选项C“尖顶凸轮”是不包括在凸轮按形状分类中的。
15、机械小车左右两个轮分别由两个电机控制,下列哪种情况能让小车向前走的同时向左转?
A、左电机速度100,右电机速度50
B、左电机速度50,右电机速度100
C、左电机速度100,右电机速度0
D、左电机速度0,左电机速度100
解析:【喵呜刷题小喵解析】机械小车左右两个轮分别由两个电机控制,要让小车向前走的同时向左转,需要左轮的速度大于右轮的速度。在给出的选项中,只有B选项满足这个条件,即左电机速度50,右电机速度100。这种情况下,左轮的速度大于右轮的速度,小车会向前走的同时向左转。因此,正确答案是B。
16、中国记录最早的陆地军用机器人是?
A、指南车
B、美国大狗机器人
C、木牛流马
D、索尼公司的AIBO机器狗
解析:【喵呜刷题小喵解析】:题目询问中国记录最早的陆地军用机器人是什么。在选项中,A选项“指南车”是古代中国的一种用于指示方向的车辆,并非军用机器人;B选项“美国大狗机器人”是美国的一种军用机器人,但并非中国记录最早的;D选项“索尼公司的AIBO机器狗”是索尼公司推出的一款家用机器人宠物狗,与军用机器人无关。而C选项“木牛流马”是三国时期蜀汉丞相诸葛亮发明的运输工具,虽然最初并非为军事用途设计,但在后来的历史中,它被用于军事运输,因此可以视为一种陆地军用机器人。因此,正确答案是C选项“木牛流马”。
17、我们在用鱼线轮回收鱼线时,松开手鱼线也不会被拉出,是因为?
A、鱼线被卡死了,不能动
B、因为水里的鱼也不动
C、鱼线用完了
D、线轮上有棘轮,阻止了一个方向的转动
解析:【喵呜刷题小喵解析】鱼线轮回收鱼线时,松开手鱼线不会被拉出,这是因为线轮上有棘轮机构,阻止了线轮在一个方向上的转动。这种棘轮机构可以防止鱼线在松开手后继续被拉出,从而保证收线的安全性。选项A“鱼线被卡死了,不能动”、选项B“因为水里的鱼也不动”和选项C“鱼线用完了”都不符合鱼线轮的工作原理和实际情况,因此可以排除。因此,正确答案是D,即线轮上有棘轮,阻止了一个方向的转动。
18、如图关于双摇杆机构,说法正确的是?( )

A、a是基座
B、b是摇杆
C、c做摇摆动作
D、d是连杆
解析:【喵呜刷题小喵解析】根据题目中的图片,我们可以识别出各个部分:* a是基座:基座是固定不动的部分,图中并没有明确指出哪部分是基座。* b是摇杆:摇杆是可以摆动的部分,但题目中的图片并没有明确标出摇杆。* c做摇摆动作:从图片中可以看到,有一个部分在做摇摆动作,这部分应该是连杆。* d是连杆:题目中的图片中明确标出了连杆,且该部分在做摇摆动作,符合题目的描述。综上,题目中给出的关于双摇杆机构的说法,只有“c做摇摆动作”是正确的,因此正确答案是C。
19、如图机构,下列说法正确的是?
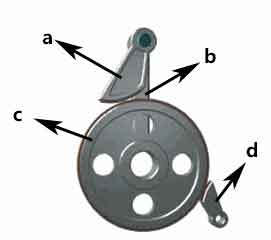
A、a 是止回摆杆
B、b 是止回棘爪
C、c 是棘轮
D、d 是主动棘爪
解析:【喵呜刷题小喵解析】根据提供的图片,机构中包括了止回摆杆、止回棘爪、棘轮和主动棘爪四个部分。根据常识和棘轮机构的特性,我们知道棘轮是用于传递动力的元件,通常与棘爪(主动棘爪和止回棘爪)配合使用,以防止反向转动。因此,选项C“c是棘轮”是正确的。止回摆杆和止回棘爪通常用于实现棘轮的单向转动功能,而主动棘爪则用于驱动棘轮转动。所以,选项A、B、D都是不正确的。
20、伯努利定理是指物体表面流体流速越快那么物体所受的压强越小,该原理可以解释下列哪个现象
A、向靠近的且相互平行的两张纸中间吹气,两张纸往里合
B、吹风扇时人会感到凉爽
C、冬天在屋里向玻璃上哈气会在玻璃上形成小水滴
D、对一个物体施力,可能会改变物体的运动轨迹
解析:【喵呜刷题小喵解析】伯努利定理指出,物体表面流体流速越快,物体所受的压强越小。对于选项A,向靠近的且相互平行的两张纸中间吹气,由于吹气使得两张纸中间的空气流速加快,根据伯努利定理,两张纸中间的压强会减小,从而使得两张纸往里合。这与伯努利定理的原理相符合。选项B描述的是吹风扇时人会感到凉爽,这主要是由于风扇吹出的风带走了一部分热量,使人感觉凉爽,与伯努利定理没有直接关系。选项C描述的是冬天在屋里向玻璃上哈气会在玻璃上形成小水滴,这是由于哈出的水蒸气遇到冷的玻璃表面液化形成的小水滴,与伯努利定理无关。选项D描述的是对一个物体施力,可能会改变物体的运动轨迹,这是力的作用效果之一,与伯努利定理也没有关系。因此,正确答案是A。
21、如图关于自行车说法错误的是?

A、自行车轮上的花纹是为了增加摩擦力,防止打滑
B、采用了皮带传动
C、大链轮和小链轮的旋转方向相同
D、自行车框架采用了三角形结构增加稳定性
解析:【喵呜刷题小喵解析】:自行车轮上的花纹是为了增加摩擦力,防止打滑,A选项正确;自行车采用了链条传动,而不是皮带传动,B选项错误;大链轮和小链轮的旋转方向相同,C选项正确;自行车框架采用了三角形结构增加稳定性,D选项正确。因此,B选项“采用了皮带传动”说法错误。
22、.“工业机器人之父”是?
A、阿西莫夫
B、乔治·德沃尔
C、约瑟夫·英格伯格
D、卡雷尔·恰佩克
解析:【喵呜刷题小喵解析】:乔治·德沃尔和约瑟夫·英格伯格被公认为是工业机器人领域的先驱,但“工业机器人之父”的荣誉更多地归属于约瑟夫·英格伯格。约瑟夫·英格伯格于1954年研制出了第一台可编程的机器人“Unimate”,这台机器人被广泛应用于汽车制造行业,极大地提高了生产效率。因此,约瑟夫·英格伯格被誉为“工业机器人之父”。
23、下列哪个是内啮合棘轮机构?( )
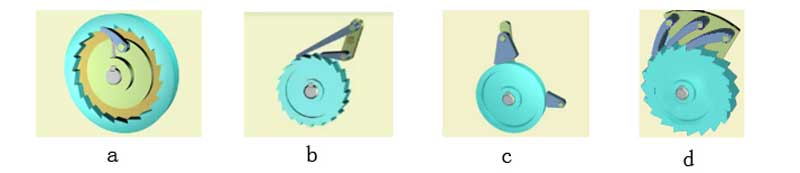
A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】棘轮机构包括外啮合棘轮机构、内啮合棘轮机构和齿条棘轮机构,其特点在于,其主动件(棘轮)是连续的作间歇运动的部件。题目中的选项给出了四个图片,需要识别哪个是内啮合棘轮机构。根据棘轮机构的定义和原理,主动件(棘轮)需要与被动件(棘爪)有啮合关系,并且主动件(棘轮)需要作间歇运动。从图片中可以看到,选项A的棘轮与棘爪之间有啮合关系,并且棘轮作间歇运动,符合内啮合棘轮机构的特点。因此,正确答案是A。
24、2.皮带传动的特点不包括?
A、可实现远距离传动
B、可以保护机械
C、时间有延缓
D、可以准确无误地传递动力
解析:【喵呜刷题小喵解析】:皮带传动是一种常用的动力传递方式,其特点主要包括可以实现远距离传动、可以保护机械以及时间有延缓。然而,皮带传动并不能准确无误地传递动力,因为皮带在传递过程中可能会产生打滑、松弛等现象,导致动力的损失和传递的不准确。因此,选项D“可以准确无误地传递动力”不是皮带传动的特点。
25、如图一辆小汽车停在陡坡上,那么它受到的力有?( )

A、重力、支持力、摩擦力
B、下滑力、摩擦力
C、弹力、摩擦力
D、支持力、下滑力
解析:【喵呜刷题小喵解析】:根据受力分析,一辆小汽车停在陡坡上,它受到的重力与支持力是一对平衡力,同时,由于汽车在斜坡上,它还会受到一个沿斜面向下的下滑力,为了保持静止,汽车还会受到一个沿斜面向上的静摩擦力。因此,它受到的力有重力、支持力和摩擦力。下滑力并不是汽车受到的力,而是下滑趋势的表现,不是实际受到的力。所以,选项A是正确的。
26、25.以下装置中,动力传递会产生延迟的是?
A、皮带传动装置
B、齿轮传动装置
C、链条传动装置
D、曲柄连杆装置
解析:【喵呜刷题小喵解析】皮带传动装置在动力传递过程中,由于皮带的弹性变形和滑动摩擦,会产生一定的延迟。齿轮传动装置、链条传动装置和曲柄连杆装置在动力传递过程中,由于它们的设计和工作原理,不会产生明显的延迟。因此,正确答案是A,即皮带传动装置。
27、关于棘轮机构,说法错误的是?( )
A、摩擦式棘轮机构动程可以无级调节
B、棘轮机构一定有主动棘爪和止回棘爪两个棘爪
C、外啮合棘轮机构比内啮合棘轮机构更容易维修安装
D、齿式棘轮机构动程只能有级调节
解析:【喵呜刷题小喵解析】:棘轮机构中,棘爪的数量并不是固定的,可以有多个棘爪,但并非一定需要主动棘爪和止回棘爪两个棘爪。因此,选项B的说法是错误的。其他选项中的说法都是正确的,摩擦式棘轮机构动程可以无级调节,外啮合棘轮机构比内啮合棘轮机构更容易维修安装,齿式棘轮机构动程只能有级调节。
28、机械工程中机构的两构件通过点接触而构成的运动副为?( )
A、高副
B、低副
C、中副
D、无法判断
解析:【喵呜刷题小喵解析】:在机械工程中,机构的两构件通过点接触而构成的运动副被称为高副。这种接触方式使得两构件之间能够产生相对运动,并且由于接触点少,所以接触面积也较小。与此相对的是低副,它是通过面接触来构成运动副的,接触面积较大。因此,选项A“高副”是正确的答案。
29、如图所示是?
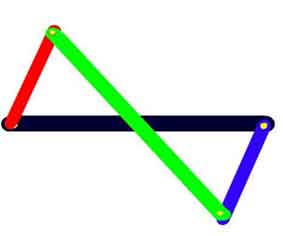
A、曲柄滑块机构
B、曲柄摇杆机构
C、反向双曲柄机构
D、平行双曲柄机构
解析:【喵呜刷题小喵解析】:根据题目中的图片,我们可以看到两个曲柄,且它们之间通过滑块连接。这种机构被称为反向双曲柄机构。因此,正确答案是C,即“反向双曲柄机构”。
30、如图,哪个是齿轮传动?

A、a
B、b
C、c
D、d
解析:【喵呜刷题小喵解析】齿轮传动是一种通过齿轮之间的啮合来传递动力或运动的机械装置。在提供的图片中,齿轮传动的特征是两个齿轮通过齿的啮合来传递动力。观察选项中的图片,只有选项C中的两个齿轮有明显的啮合,符合齿轮传动的特征。因此,正确答案是C。
二、多选题
31、31.机器人发展经历了哪三代?
A、示教再现型机器人
B、感知型机器人
C、人形机器人
D、智能机器人
解析:【喵呜刷题小喵解析】:机器人发展经历了三代,分别是示教再现型机器人、感知型机器人和智能机器人。示教再现型机器人是最早的一代机器人,它们通过预先编程或示教来执行任务。感知型机器人则能够感知周围环境并作出反应,它们具有一定的自主性和适应性。智能机器人则是当前发展的最高阶段,它们能够理解任务、做出决策并与人进行交互。因此,正确答案为ABD。
32、关于曲柄摇杆机构说法正确的有哪些?( )
A、曲柄做回转动作
B、曲柄做摇摆动作
C、摇杆做回转动作
D、摇杆做摇摆动作
解析:【喵呜刷题小喵解析】:在曲柄摇杆机构中,曲柄做回转动作,而摇杆做摇摆动作。因此,选项A和D是正确的。选项B和C描述错误,因为曲柄做回转动作,而不是摇摆动作,摇杆做摇摆动作,而不是回转动作。
33、如图一个小朋友推一个静止在地面上的箱子,说法正确的是?( )

A、箱子开始移动之前受到了静摩擦力
B、箱子开始移动之后受到了滑动摩擦力
C、箱子受到了滚动摩擦力
D、最大静摩擦力大于滑动摩擦力
解析:【喵呜刷题小喵解析】:首先,从图中我们可以看到小朋友正在推一个静止的箱子。在箱子开始移动之前,小朋友对箱子有一个推力,但是箱子仍然静止,说明箱子受到的推力小于最大静摩擦力,此时箱子受到的是静摩擦力。所以,选项A正确。当箱子开始移动时,它不再保持静止状态,而是开始沿着地面滑动。此时,摩擦力变成了滑动摩擦力,而不是静摩擦力。所以,选项B正确。关于滑动摩擦力和静摩擦力的关系,我们知道最大静摩擦力总是大于或等于滑动摩擦力。这是因为静摩擦力是阻止物体开始运动的力,而滑动摩擦力是物体开始运动后阻碍其运动的力。所以,选项D正确。至于选项C,题目中并没有提到箱子受到了滚动摩擦力。滚动摩擦力通常发生在物体在接触面上滚动而不是滑动时,但在这个场景中,箱子是沿着地面滑动的,而不是滚动的。因此,选项C是错误的。
34、链传动的特点有哪些?( )
A、适用于远距离传动
B、可以精确地传递动力
C、传动链长度可以调节
D、可任意角度啮合
解析:【喵呜刷题小喵解析】:链传动是一种通过链条和链轮之间的啮合来实现动力传递的机械传动方式。A选项“适用于远距离传动”是正确的,因为链传动可以跨越较大的距离进行动力传递。B选项“可以精确地传递动力”,与带传动相比,链传动没有弹性滑动,因此能够保持准确的平均传动比,传动效率较高。C选项“传动链长度可以调节”也是正确的,因为链条的长度可以根据需要进行调整,以适应不同的传动需求。然而,D选项“可任意角度啮合”也是不正确的,因为链传动中的链轮和链条必须在特定的角度范围内啮合,以实现平稳的传动。因此,正确答案为A、C。
35、如图关于该机构说法正确的有哪些?

A、这是槽轮机构
B、a是主动件
C、b是从动件
D、这是凸轮机构
解析:【喵呜刷题小喵解析】:根据提供的图片,我们可以看到槽轮机构,其中a是主动件,b是从动件。因此,选项A“这是槽轮机构”、选项B“a是主动件”、选项C“b是从动件”都是正确的。而选项D“这是凸轮机构”是不正确的,因为图片显示的是槽轮机构,而不是凸轮机构。所以,正确答案是选项A、B、C。
三、判断题
36、凸轮机构是一种高副机构。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:凸轮机构是一种高副机构,因为凸轮机构中的凸轮与从动件之间是通过点或线接触来传递运动和动力的,这种接触方式属于高副。因此,选项A“正确”是正确的。
37、1959年,乔治·德沃尔制造世界第一台工业机器人,他也被称为“工业机器人之父”。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:乔治·德沃尔虽然对工业机器人领域做出了重要贡献,但他并不是第一个制造工业机器人的人。实际上,世界上第一台工业机器人是由约瑟夫·恩格尔伯格在1920年代发明的,因此乔治·德沃尔被称为“工业机器人之父”的说法是不准确的。因此,答案为B,即该说法是错误的。
38、物体表面气流速度越快,受到的气压越小。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:根据伯努利方程,当流体(如空气)流动时,流速增加,压强减小。因此,当物体表面的气流速度越快,受到的气压越小。所以,题目中的陈述是正确的。
39、小齿轮带动大齿轮可以实现减速。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:小齿轮带动大齿轮时,大齿轮的半径比小齿轮大,因此,当两齿轮以相同的角速度旋转时,大齿轮的线速度会小于小齿轮的线速度。这意味着大齿轮的转速会低于小齿轮的转速,从而实现减速效果。因此,小齿轮带动大齿轮可以实现减速的说法是正确的。
40、链传动、齿轮传动、皮带传动都可以同一平面内传动。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:链传动、齿轮传动和皮带传动都是常见的机械传动方式,它们都可以在同一平面内进行传动。链传动是通过链条和链轮之间的啮合来实现动力的传递;齿轮传动则是通过齿轮之间的啮合来实现动力的传递;皮带传动则是通过皮带和皮带轮之间的摩擦来实现动力的传递。因此,题目中的说法是正确的。
41、48.皮带传动的能量损失小,传递动力准确。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:皮带传动是一种通过皮带将动力从一个轴传递到另一个轴的传动方式。然而,皮带在传递动力时,由于皮带与皮带轮之间的摩擦和滑动,会产生一定的能量损失。此外,皮带传动的动力传递并不是完全准确的,因为皮带的伸长、松弛和打滑等因素都可能影响动力的传递效率。因此,皮带传动的能量损失相对较大,传递动力也不是非常准确。所以,题目中的说法“皮带传动的能量损失小,传递动力准确”是不正确的。
42、滑杆机构中滑块在轨道上来回滑动。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:滑杆机构中,滑块确实是在轨道上来回滑动的。因此,该题目陈述的内容是正确的。所以,答案为A。
43、皮带交叉传动,两带轮的转向相反。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在皮带交叉传动中,两带轮的转向确实相反。这是因为交叉传动是通过皮带在带轮之间交叉传递动力,使得两个带轮的旋转方向相反。因此,选项A“正确”是正确的。
44、像行星一样,一边自转一边围绕着“恒星”公转的齿轮称为“行星齿轮”。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:行星齿轮确实是一种特殊的齿轮,它一边自转,一边围绕“恒星”公转。这种设计在机械系统中非常常见,特别是在需要同时实现旋转和平移运动的场合。因此,题目中的描述是正确的。
45、生物能也是机器人的能力评价标准。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:题目中的观点是“生物能也是机器人的能力评价标准”。生物能,通常是指利用生物质作为燃料,将其转化为能量的过程,例如生物质发电、生物质燃料等。而机器人,则是一种能够自动或半自动执行特定任务的机器系统。生物能与机器人的能力评价标准之间并没有直接的联系。机器人的能力评价标准通常包括其智能水平、动作准确性、反应速度、负载能力等方面,并不涉及生物能。因此,生物能不是机器人的能力评价标准,题目中的观点是错误的。所以,答案选择B。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




