



一、多选题
1、关于齿轮传动的特点说法正确的有?( )
A、能够精确地计算传动比
B、能够有缓冲作用保护机械
C、适合近距离传动
D、适合远距离传动
解析:【喵呜刷题小喵解析】:齿轮传动是一种机械传动方式,它通过齿轮之间的啮合来实现动力的传递。对于题目中的选项,我们来逐一分析:
A. 能够精确地计算传动比:齿轮传动的传动比可以通过齿轮的齿数比来精确计算,这是齿轮传动的一个显著特点。因此,这个选项是正确的。
B. 能够有缓冲作用保护机械:齿轮传动本身并不具备缓冲作用,它更多的是刚性传动,不像带传动那样可以有一定的缓冲作用。所以,这个选项是不正确的。
C. 适合近距离传动:齿轮传动的两个齿轮之间需要有一定的距离来确保齿轮的啮合,因此它更适合近距离的传动。这个选项是正确的。
D. 适合远距离传动:齿轮传动由于需要两个齿轮之间的啮合,因此不适合远距离的传动。相比之下,带传动更适合远距离的传动。所以,这个选项是不正确的。
综上所述,关于齿轮传动的特点说法正确的有:A. 能够精确地计算传动比,C. 适合近距离传动。
2、以下哪些属于链传动的零部件?( )
A、链轮
B、皮带轮
C、传动链
D、皮带
解析:【喵呜刷题小喵解析】:链传动是一种通过链条和链轮来传递动力和运动的机械传动方式。链轮是链传动中的关键零部件,用于与链条啮合,从而传递动力。传动链则是实际传递动力和运动的链条,也是链传动的重要部分。皮带轮和皮带是带传动中的零部件,与链传动无关。因此,选项A链轮和选项C传动链属于链传动的零部件,而选项B皮带轮和选项D皮带不属于链传动的零部件。
3、杠杆的分类有哪些?( )
A、省力杠杆
B、费力杠杆
C、等臂杠杆
D、弯曲杠杆
解析:【喵呜刷题小喵解析】:杠杆的分类主要有省力杠杆、费力杠杆和等臂杠杆。弯曲杠杆并不是一个标准的杠杆分类,因此不应选入。省力杠杆是指在使用时能够省力,费力杠杆是指在使用时需要费力,等臂杠杆则是指在使用时既不省力也不省力,但可以改变力的方向。因此,选项nA、nB和nC是正确的。
4、下列传动方式可以准确无误地传递动力的有哪些?( )
A、齿轮平行传动
B、齿轮垂直传动
C、链传动
D、蜗轮蜗杆传动
解析:【喵呜刷题小喵解析】:齿轮平行传动、齿轮垂直传动、链传动和蜗轮蜗杆传动都是准确无误地传递动力的传动方式。齿轮平行传动和齿轮垂直传动通过齿轮之间的啮合来实现动力的传递,而链传动则是通过链条和链轮之间的配合来实现动力的传递。蜗轮蜗杆传动则是通过蜗杆和蜗轮之间的啮合来实现动力的传递。这些传动方式都能实现动力的准确无误地传递。
二、实操题
5、
搭建说明:
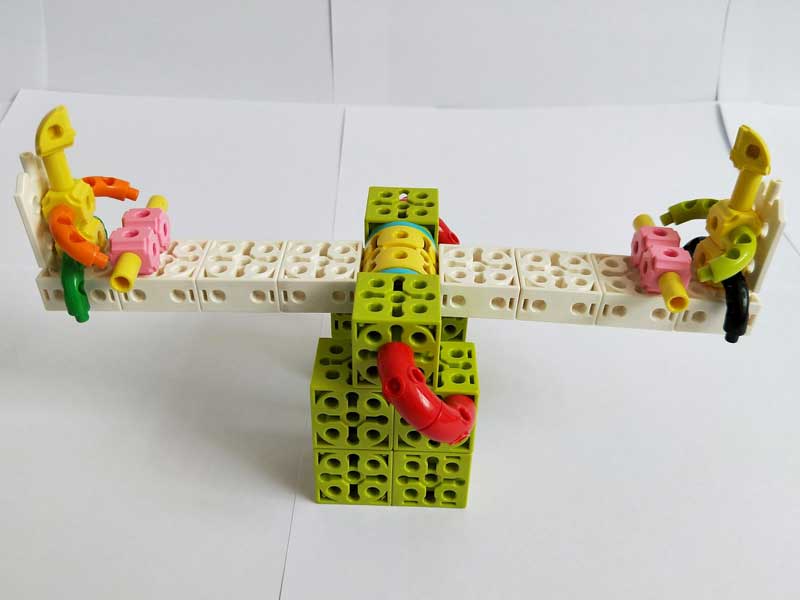
在游乐场大家经常看见跷跷板,请考生做一个简单的跷跷板。
搭建要求:
(1) 具备跷跷板大体框架,模型具备稳定性;
(2) 跷跷板在静止状态可保持水平平衡;
(3) 利用三角形稳定性来保证跷跷板支架的稳固;
(4) 当跷跷板两侧各加上不同重量的重物时,跷跷板无法保持平衡。
案例样图:
以下列举了相关器材模型样例,考生可任选其一作为参考。< br>
【器材说明】样例器材选自经中国电子学会评审通过的全国青少年机器人技术等级考试一级、二级适用器材。仅供参考,不作为考试评审的唯一依据。





参考答案:
略
解析:【喵呜刷题小喵解析】:本题是一道编程题,但实际上更像是一道搭建题。在编程题中,通常需要根据给定的算法或逻辑,使用编程语言来实现特定的功能。但在这个问题中,我们需要通过手动搭建的方式来实现一个物理模型,而不是编写代码。在搭建跷跷板时,我们需要注意以下几点:1. 稳定性:跷跷板需要具有足够的稳定性,才能够承受使用者的重量和移动。2. 平衡性:跷跷板需要在静止状态下保持水平平衡,这需要我们合理地设计支架和跷跷板主体部分。3. 三角形稳定性:三角形是最稳定的几何形状之一,我们可以利用三角形的稳定性来保证跷跷板支架的稳固。4. 非平衡性:当跷跷板两侧各加上不同重量的重物时,跷跷板应该无法保持平衡,这需要我们合理地设计跷跷板的杠杆比例和重心位置。在搭建过程中,我们可以参考给出的样图,选择适合的器材来搭建跷跷板。需要注意的是,样图仅供参考,不作为考试评审的唯一依据,我们需要根据自己的理解和实践经验来搭建出符合要求的跷跷板。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!



