



一、单选题
1、两块ESP32主控板A和B通过WiFi互联,A为AP,其ssid为"ABC",password为"12345678"。下列选项中,能实现B以STA模式连接到A的程序是?( )
A、WiFi.softAP("ABC","12345678");
B、WiFi.softAPConnect("ABC","12345678");
C、WiFi.begin("ABC","12345678");
D、WiFiServer.begin("ABC","12345678");
解析:【喵呜刷题小喵解析】题目中明确提到,A为AP(接入点)模式,其ssid为"ABC",password为"12345678"。B需要以STA(客户端)模式连接到A。A选项:`WiFi.softAP("ABC","12345678");` 这个函数用于设置ESP32为AP模式,而不是STA模式,所以A选项是错误的。B选项:`WiFi.softAPConnect("ABC","12345678");` 这个函数在ESP32库中并不存在,因此B选项是错误的。C选项:`WiFi.begin("ABC","12345678");` 这个函数用于设置ESP32为STA模式,并连接到指定的AP,其ssid为"ABC",password为"12345678",与题目要求一致,所以C选项是正确的。D选项:`WiFiServer.begin("ABC","12345678");` 这个函数用于创建WiFi服务器,而不是连接到一个AP,所以D选项是错误的。因此,正确答案是C选项。
2、TCP/IP四层模型中,HTTP协议属于?( )
A、应用层
B、传输层
C、网络层
D、网络接口层
解析:【喵呜刷题小喵解析】:TCP/IP四层模型包括应用层、传输层、网络层和网络接口层。HTTP协议是一种应用层协议,用于在Web浏览器和Web服务器之间传输超文本。因此,HTTP协议属于TCP/IP四层模型中的应用层。选项A“应用层”是正确的答案。
3、PID 控制中 I 控制是指?
A、比例控制
B、积分控制
C、微分控制
D、闭环控制
解析:【喵呜刷题小喵解析】:在PID控制中,I控制指的是积分控制。PID控制是一种控制策略,由比例(P)、积分(I)和微分(D)三部分组成。其中,积分控制用于消除静态误差,通过累加误差来实现对系统输出的调整,使系统达到期望的稳态值。因此,选项B“积分控制”是正确的答案。
4、MPU6050 姿态传感器中,用于获取加速度原始数据的传感器单元是?
A、Accelerator
B、Gyroscope
C、DMP
D、I2C
解析:【喵呜刷题小喵解析】:MPU6050姿态传感器中,用于获取加速度原始数据的传感器单元是加速度计(Accelerometer)。因此,正确答案是A,即“Accelerator”。陀螺仪(Gyroscope)主要用于测量角速度,数字运动处理器(DMP)是MPU6050中的一个功能,用于协助处理传感器数据,I2C是传感器与微控制器之间通信的接口协议,而不是用于获取加速度原始数据的传感器单元。
5、ESP32 for Arduino 提供的WiFi类库的成员函数中,用于设定为STA模式的成员函数是?( )
A、WiFi.begin()
B、WiFi.softAP()
C、WiFi.localIP()
D、WiFi.softAPIP()
解析:【喵呜刷题小喵解析】:在ESP32 for Arduino提供的WiFi类库中,用于设定为STA(Station)模式的成员函数是`WiFi.begin()`。在STA模式下,设备作为客户端连接到WiFi网络。其他选项中,`WiFi.softAP()`用于启动接入点(Access Point)模式,`WiFi.localIP()`用于获取本地IP地址,`WiFi.softAPIP()`用于设置接入点的IP地址,这些都不是用于设定为STA模式的成员函数。因此,正确答案是A。
6、SPI通信,片选数据线的名称是?( )
A、SCLK
B、MOSI
C、MISO
D、SS
解析:【喵呜刷题小喵解析】:SPI(Serial Peripheral Interface)通信是一种同步串行通信协议,常用于微控制器与其他数字设备之间的通信。在SPI通信中,片选(Chip Select)数据线用于选择哪个设备将参与通信。根据题目给出的选项,片选数据线的名称是SS(Slave Select),因此正确答案是D。
7、网页浏览时,HTTP协议的默认端口是?( )
A、21
B、25
C、80
D、110
解析:【喵呜刷题小喵解析】:HTTP协议的默认端口是80。在给出的选项中,A选项21是FTP协议的默认端口,B选项25是SMTP协议的默认端口,D选项110是POP3协议的默认端口。因此,正确答案是C选项80。
8、在 TCP/IP 通信中,通过 IP 地址+端口来区分不同的服务,web 服务对应的端口是?
A、20
B、21
C、80
D、404
解析:【喵呜刷题小喵解析】:在TCP/IP通信中,每个服务都有对应的端口号。Web服务通常使用80端口。因此,正确答案是C选项,即80。其他选项20、21和404都不是Web服务的标准端口号。
9、HTML文档中,用于在浏览器选项卡中显示页面标题的标签是?( )
A、
B、
C、
D、
解析:【喵呜刷题小喵解析】:在HTML文档中,用于在浏览器选项卡中显示页面标题的标签是`
10、下图是三相反应式步进电机工作示意图,图示所对应的工作方式为?( )

A、三相单双三拍
B、三相单三拍
C、三相双三拍
D、三相单双六拍
解析:【喵呜刷题小喵解析】:根据提供的三相反应式步进电机工作示意图,可以观察到电机有三个相,并且每相都有两个触点,同时,图示显示只有其中一个相在通电,另外两个相未通电,这种工作方式被称为三相单三拍,故选项B“三相单三拍”为正确答案。选项A“三相单双三拍”表示电机每个相在两个周期内通电,而选项C“三相双三拍”表示每个相在三个周期内通电,与图示不符。选项D“三相单双六拍”也与图示不符。因此,正确答案为B。
11、ESP32主控板向MPU6050姿态传感器写入数据,程序如下,方框内对应的程序是?( )
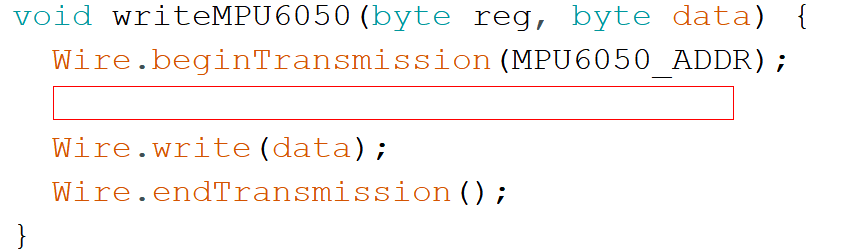
A、Wire.read(reg)
B、Wire.write(reg)
C、Wire.read()
D、Wire.requestFrom(MPU6050_ADDR,1)
解析:【喵呜刷题小喵解析】题目中要求找出ESP32主控板向MPU6050姿态传感器写入数据的程序。根据题目给出的选项,我们可以逐一分析:A. `Wire.read(reg)`:这个操作是读取一个寄存器(reg)的值,而不是写入数据。B. `Wire.write(reg)`:这个操作是将一个寄存器(reg)的值写入到某个设备,符合向MPU6050姿态传感器写入数据的操作。C. `Wire.read()`:这个操作没有指定读取哪个寄存器的值,因此不是题目中要求的操作。D. `Wire.requestFrom(MPU6050_ADDR,1)`:这个操作是从指定的地址(MPU6050_ADDR)请求数据,也不是写入数据的操作。因此,正确答案是B,即`Wire.write(reg)`。
12、SPI通信中,有关MOSI数据线描述正确的是?
A、从机选择线
B、串行时钟线
C、用于从机向主机发送数据
D、用于主机向从机发送数据
解析:【喵呜刷题小喵解析】SPI(Serial Peripheral Interface)是一种高速、全双工、同步的串行通信协议。在SPI通信中,MOSI(Master Out Slave In)数据线用于主机向从机发送数据,而MISO(Master In Slave Out)数据线用于从机向主机发送数据。因此,选项D“用于主机向从机发送数据”是正确的描述。选项A“从机选择线”通常指的是CS(Chip Select)线,用于选择哪个从机参与通信。选项B“串行时钟线”指的是SCK(Serial Clock)线,用于同步主机和从机的数据传输。选项C“用于从机向主机发送数据”与MOSI线的功能相反。
13、I2C串行通信,用于传送同步时钟信号的是?( )
A、SDA
B、SCL
C、TX
D、RX
解析:【喵呜刷题小喵解析】:I2C串行通信中,用于传送同步时钟信号的是SCL。因此,选项B“SCL”是正确的答案。其他选项A、C、D均不是I2C串行通信中用于传送同步时钟信号的信号线。
14、MPU6050姿态传感器中,Accelerator传感器单元用于获取?
A、加速度原始数据
B、角速度原始数据
C、姿态角原始数据
D、位移原始数据
解析:【喵呜刷题小喵解析】:MPU6050姿态传感器中的Accelerator传感器单元用于获取加速度原始数据。这是MPU6050传感器的基本功能之一,它可以测量设备在三个轴向上的加速度,并将这些原始数据提供给用户。其他选项如角速度原始数据、姿态角原始数据和位移原始数据都不是Accelerator传感器单元的主要功能。因此,正确答案是A,即加速度原始数据。
15、SPI通信,主机向从机发送数据的数据线是?( )
A、SCLK
B、MOSI
C、MISO
D、SDA
解析:【喵呜刷题小喵解析】:SPI通信中,主机向从机发送数据的数据线是MOSI,即主设备输出从设备输入信号线(Master Out Slave In)。因此,正确答案是B选项。
16、TCP/IP四层模型中,下列选项中,属于网络层的协议有?( )
A、HTTP
B、TCP
C、FTP
D、IP
解析:【喵呜刷题小喵解析】:TCP/IP四层模型包括应用层、传输层、网络层和链路层。其中,网络层主要负责路由和转发数据包,主要协议有IP(Internet Protocol,互联网协议)、ICMP(Internet Control Message Protocol,互联网控制消息协议)等。HTTP(超文本传输协议)、TCP(传输控制协议)和FTP(文件传输协议)都是传输层协议,而不是网络层协议。因此,正确答案是D,即IP。
17、SPI通信,下列引脚中,用于从设备选择的数据线为?
A、SDA
B、MOSI
C、SCLK
D、SS
解析:【喵呜刷题小喵解析】:SPI(Serial Peripheral Interface)通信是一种同步串行通信协议,常用于微控制器与其他数字设备之间的通信。在SPI通信中,SS(Slave Select)引脚是用于从设备选择的数据线。当SS引脚被拉低时,表示选择该从设备进行通信。因此,正确答案是D,即SS。
18、ESP32 for Arduino 提供的WiFi类库成员函数中,具有创建一个接入点,并设置SSID和密码功能的成员函数是?
A、WiFi.softAP()
B、WiFi.begin()
C、WiFi.softAPIP()
D、WiFi.localAP()
解析:【喵呜刷题小喵解析】:在ESP32 for Arduino提供的WiFi类库中,用于创建接入点并设置SSID和密码的成员函数是WiFi.softAP()。这个函数允许用户配置一个WiFi接入点,并指定其SSID和密码。因此,正确答案是A。
19、I2C串行通信空闲时,下列有关SDA和SCL数据线的电平说法正确的是?
A、两者均为高电平
B、两者均为低电平
C、SDA为低电平,SCL为高电平
D、SDA为高电平,SCL为低电平
解析:【喵呜刷题小喵解析】:I2C串行通信空闲时,SDA和SCL数据线的电平均应为高电平。这是因为I2C协议规定,当SCL(串行时钟线)为高电平时,SDA(串行数据线)上的数据才有效。因此,在空闲时,即没有数据传输时,SDA和SCL都应为高电平。所以,选项A“两者均为高电平”是正确的。
20、MPU6050姿态传感器中的加速度传感器单元可以设置如下不同的量程,其中测量精度最低的量程是?( )
A、±2g
B、±4g
C、±8g
D、±16g
解析:【喵呜刷题小喵解析】在MPU6050姿态传感器中,加速度传感器单元的量程与测量精度有关。量程越大,测量精度越低。在本题中,给出的四个选项分别为±2g、±4g、±8g和±16g。其中,±16g的量程最大,因此其测量精度最低。因此,正确答案是D。
二、多选题
21、采用 SPI 进行数据通信,下列四个引脚用于数据传输的引脚有哪些?
A、MOSI
B、MISO
C、SS
D、SCLK
解析:【喵呜刷题小喵解析】:在SPI(Serial Peripheral Interface)通信协议中,数据传输是通过特定的引脚进行的。在这四个选项中,A MOSI(Master Out Slave In)和 B MISO(Master In Slave Out)是用于数据传输的引脚。A MOSI 用于从主机向从机发送数据,而 B MISO 用于从从机向主机发送数据。C SS(Chip Select)引脚用于选择或激活从设备,但不是直接用于数据传输。D SCLK(Serial Clock)引脚是用于同步数据传输的时钟信号,但它本身不直接传输数据。因此,正确答案是 A 和 B。
22、PID 控制,常用控制方式有?
A、P 控制
B、PI 控制
C、PD 控制
D、PID 控制
解析:【喵呜刷题小喵解析】:PID控制是比例-积分-微分控制,它是控制工程中常用的一种控制方式。A选项中的P控制代表比例控制,B选项中的PI控制代表比例-积分控制,C选项中的PD控制代表比例-微分控制,而D选项则是完整的PID控制。因此,ABCD都是PID控制中的常用控制方式。
23、关于步进电机,以下说法中正确的有?( )
A、步进电机转动采用电脉冲信号控制
B、步进电机转动的速度与脉冲频率成正比
C、步进电机是执行器
D、步进电机运转时,会产生误差累计
解析:【喵呜刷题小喵解析】:步进电机是一种执行器,其转动采用电脉冲信号控制,转动的速度与脉冲频率成正比。因此,选项A、B、C的说法都是正确的。而选项D的说法“步进电机运转时,会产生误差累计”是不准确的,步进电机在运转时,其位置精度取决于脉冲数,而不是误差累计。因此,选项D是错误的。
24、步进电机按照结构形式分类为?
A、反应式
B、永磁式
C、混合式
D、直线式
解析:【喵呜刷题小喵解析】:步进电机按照结构形式分类主要有反应式、永磁式和混合式。反应式步进电机利用磁阻的变化产生转矩,永磁式步进电机利用永磁体的磁场产生转矩,混合式步进电机结合了反应式和永磁式的特点,具有更高的性能和效率。直线式步进电机是一种特殊类型的步进电机,主要用于直线运动,不属于步进电机按照结构形式的分类。因此,正确答案为反应式、永磁式和混合式。
25、一台计算机连接到互联网,可完成网页浏览、邮件发送等任务,不同服务可能具有不同的?( )
A、应用层协议
B、传输层协议
C、端口
D、网络层协议
解析:【喵呜刷题小喵解析】:计算机连接到互联网,可以完成网页浏览、邮件发送等任务,这些任务涉及到不同的服务。对于不同的服务,它们可能具有不同的应用层协议和端口。应用层协议定义了应用程序如何通过网络进行通信,而端口则用于标识特定的服务或应用程序。因此,不同服务可能具有不同的应用层协议和端口。网络层协议和传输层协议是网络通信的基础,但它们通常不会因不同的服务而有所变化。因此,答案是A、C。
三、判断题
26、Web服务采用的是请求/相应模式。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:Web服务通常遵循请求/响应模式。在这种模式中,客户端发送一个请求到服务器,服务器处理该请求并返回相应的响应。因此,题目的陈述是正确的。
27、ESP32芯片集成了WiFi和双模蓝牙功能。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:ESP32芯片集成了WiFi和双模蓝牙功能,这是ESP32芯片的一个主要特点。因此,题目中的陈述是正确的。
28、互联网信息交互主要采用客户端/服务器模式。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:互联网信息交互主要采用客户端/服务器模式。客户端/服务器模式是一种网络架构,其中客户端是用户使用的设备,如电脑或手机,而服务器是存储数据和提供服务的设备。客户端通过发送请求与服务器进行交互,服务器处理请求并返回结果给客户端。这种模式使得客户端和服务器可以分布在不同的地理位置,并通过网络进行通信,从而实现信息的交互和共享。因此,题目中的陈述是正确的。
29、TCP/IP协议是一系列协议的统称。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:TCP/IP协议确实是一系列协议的统称,它包括了传输控制协议(TCP)和网络协议(IP)以及其他一些协议,这些协议共同构成了互联网的基础通信协议。因此,题目中的说法是正确的。
30、ESP32仅提供了WiFi一种无线通信方式。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:ESP32不仅提供了WiFi一种无线通信方式,还提供了蓝牙通信功能。因此,题目中的说法是不准确的,答案应选B。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




