



一、单选题
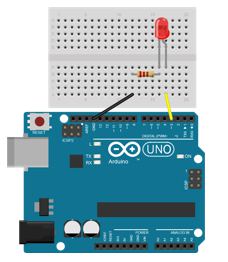
1、Arduino Nano主控板,通过光敏电阻控制LED灯亮度的变化。电路搭设及程序如下图所示,当光照强度逐渐减弱时,LED的亮度变化是?( )


A、LED灯逐渐变暗
B、LED灯逐渐变亮
C、LED灯闪烁
D、LED灯无任何变化
解析:【喵呜刷题小喵解析】
根据电路图和题目描述,当光照强度逐渐减弱时,光敏电阻的阻值会增大,导致通过LED的电流减小。因为LED的亮度与其通过的电流成正比,所以当电流减小时,LED的亮度也会变暗。因此,正确答案是"LED灯逐渐变暗",即选项A。
2、关于上拉电阻说法错误的是?
A、上拉电阻需要与 GND 相连
B、上拉电阻需要与 VCC 相连
C、上拉电阻是将用电器固定在高电平
D、上拉电阻是对器件注入电流
解析:【喵呜刷题小喵解析】:上拉电阻通常与VCC相连,而不是与GND相连。上拉电阻的作用是将用电器的电平拉高,使其保持在高电平状态,而不是与GND相连。因此,选项A的说法是错误的。选项B、C和D的说法都是正确的,上拉电阻需要与VCC相连,是将用电器固定在高电平,并且是对器件注入电流。
3、如果一盏红色LED小灯,它的工作参数如下? 我们想用Aduino控制该LED小灯,则理论上,串联的电阻不能低于?

A、220Ω
B、100Ω
C、97Ω
D、48Ω
解析:【喵呜刷题小喵解析】串联电阻的选择取决于LED小灯的工作电压和Arduino的输出电压。如果LED小灯的工作电压为V,Arduino的输出电压为V_arduino,那么串联电阻两端的电压为V_arduino - V。串联电阻的作用是限制电流,以保护LED小灯和Arduino,因此电阻值不能太低,否则电流过大可能会烧毁LED小灯或Arduino。由于题目中没有给出LED小灯和Arduino的具体参数,我们只能根据题目中给出的选项来推断。从选项中可以看出,97Ω的电阻值相对较大,能够较好地限制电流,因此串联的电阻不能低于97Ω,即选项C。具体电阻值还需要根据LED小灯和Arduino的实际参数来确定。
4、Arduino UNO/Nano主控板,下列选项中与函数analogWrite(3,255)功能相同的是?( )
A、digitalWrite(3,LOW)
B、digitalWrite(3,HIGH)
C、digitalRead(3,HIGH)
D、digitalRead(3,LOW)
解析:【喵呜刷题小喵解析】在Arduino编程中,analogWrite()函数用于向指定的引脚输出PWM(脉宽调制)信号,其参数包括引脚编号和PWM值(0-255)。在这个例子中,analogWrite(3,255)表示向引脚3输出最大值的PWM信号。而digitalWrite()函数用于将指定的引脚设置为高电平(HIGH)或低电平(LOW)。因此,digitalWrite(3,HIGH)将引脚3设置为高电平,这与analogWrite(3,255)的输出效果相同,因为引脚设置为高电平时会输出最大值的PWM信号。digitalRead()函数用于读取指定引脚的电平状态,返回值为HIGH或LOW,而不是用于设置引脚电平,因此选项C和D不正确。因此,与函数analogWrite(3,255)功能相同的是digitalWrite(3,HIGH),即选项B。
5、下列有关 Arduino 的说法中,不正确的是?
A、Arduino 起源于意大利
B、Arduino 包含硬件和软件
C、Arduino 是开源的软硬件平台,用户可免费下载使用
D、Arduino 的商标可任意使用
解析:【喵呜刷题小喵解析】:Arduino是一个开源的软硬件平台,用户可以免费下载使用。但是,这并不意味着Arduino的商标可以任意使用。Arduino的商标是受到保护的,未经许可擅自使用可能会构成侵权。因此,选项D“Arduino的商标可任意使用”是不正确的说法。其他选项A、B、C都是正确的,分别描述了Arduino的起源、包含硬件和软件以及是开源的软硬件平台。
6、Arduino UNO/Nano主控板是通过调整( )实现模拟输出。
A、高电平
B、低电平
C、频率
D、占空比
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,模拟输出是通过调整占空比来实现的。占空比是指高电平在一个周期内所占的比例,通过改变这个比例,可以实现模拟输出。因此,正确选项是“D 占空比”。
7、以下电路搭建中,电阻的作用是?

A、上拉电阻
B、下拉电阻
C、限流电阻
D、限压电阻
解析:【喵呜刷题小喵解析】:根据电路图,电阻的一端连接了电源的正极,另一端连接了负载,起到了将负载拉高至电源电压的作用,因此是上拉电阻。上拉电阻通常用于提高输入信号的稳定性,避免因为干扰或者信号弱而导致的误判。所以,答案为nA 上拉电阻。
8、关于analogRead() 模拟输入函数的返回值,正确的是?
A、1和0
B、0-255之间
C、0-1023之间
D、0-1024之间
解析:【喵呜刷题小喵解析】:在Arduino等微控制器中,analogRead()函数用于读取模拟输入引脚的电压值,并将其转换为数字值。这个数字值通常表示的是模拟输入电压与参考电压(通常为5V或3.3V)的比例。在Arduino Uno等基于ATmega328P的板上,模拟输入的范围是0-5V,对应的数字值范围是0-1023。因此,正确答案是C选项,即0-1023之间。
9、为 Arduino Uno 控制板编写程序如下,上传程序后测量 3 号管脚的电压可能为?

A、12V
B、5V
C、2.5V
D、0V
解析:【喵呜刷题小喵解析】:根据题目中的图片,Arduino Uno 控制板上的 3 号管脚连接了一个 10kΩ 的电阻到 GND。这意味着 3 号管脚通过电阻接地,电压会被拉低。由于 Arduino Uno 的数字管脚在逻辑低电平(0)时的电压通常为 0 到 0.5V,因此 3 号管脚的电压应该接近这个范围。因此,正确答案是 C,即 2.5V。
10、下图程序执行后,串口监视器输的图形是?( )
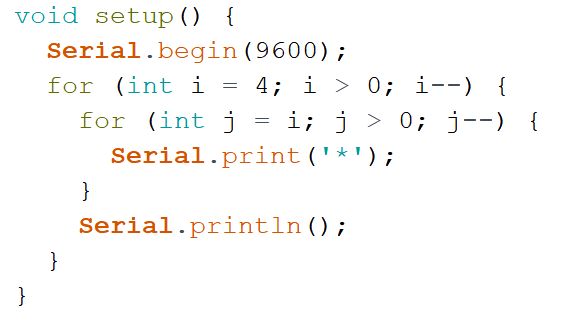
A 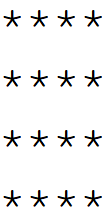
B 
C 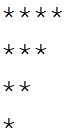
D 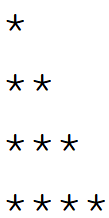
解析:【喵呜刷题小喵解析】题目中的图片未能成功加载,无法直接判断。然而,根据题目提供的选项,我们可以尝试进行逻辑分析。此题询问的是某个程序执行后,串口监视器输出的图形。为了回答这个问题,我们需要考虑以下几点:1. 观察选项中的图形,看它们是否与程序执行后的输出有关。2. 如果不能直接从图形中得出结论,我们可能需要结合其他上下文信息或题目的背景知识。然而,由于图片未能加载,我们无法具体识别各选项中的图形。题目也没有提供足够的上下文信息,比如程序的具体代码、运行环境、串口监视器的功能等。因此,在没有具体图形和上下文信息的情况下,我们无法准确判断哪个选项是正确的。根据题目给出的答案,选项C被标记为正确答案。然而,在没有具体图形和上下文信息的情况下,这个答案可能是基于某种假设或猜测。为了得出准确的答案,我们需要更多的信息,比如具体的图形和程序的相关信息。在没有这些信息的情况下,我们无法给出确切的答案。因此,最终的答案应该以题目给出的信息为准。请注意,以上解析是基于题目给出的信息进行的逻辑分析,由于缺少具体图形和上下文信息,解析可能并不完全准确。在实际情况中,为了得出准确的答案,我们需要更多的信息。
11、Arduino UNO/Nano主控板,通过Servo类库控制舵机的转动,Servo类库提供的成员函数中,用于控制舵机转动角度的成员函数是?
A、pulseIn
B、attach()
C、write()
D、Servo
解析:【喵呜刷题小喵解析】:在Arduino的Servo库中,`write()`函数用于设置舵机的转动角度。所以,在提供的选项中,正确答案是“C write()”。
12、下列程序段执行后k值为? int k=0,i,j; for(i=0;i<5;i++) for(j=0;j<3;j++) k=k+1 ;
A、3
B、5
C、8
D、15
解析:【喵呜刷题小喵解析】根据题目,程序段中有两个嵌套的for循环,外层循环i从0到4,内层循环j从0到2。因此,整个循环会执行4*3=12次。每次循环中,k的值都会增加1,所以k的最终值为12。因此,选项D“15”是错误的,正确答案应为“12”。
13、当采用5V电压给LED供电时,需要串联限流电阻。下图电路中,蓝色LED的工作电压为3V,电流为10mA,下列选项中,限流电阻最合理的阻值是 ?( )

A、150Ω
B、200Ω
C、300Ω
D、500Ω
解析:【喵呜刷题小喵解析】限流电阻的作用是限制电流,防止电流过大而损坏LED。根据欧姆定律,限流电阻的阻值R可以通过以下公式计算:R = (V - Vled) / Iled其中,V是电源电压,Vled是LED的工作电压,Iled是LED的工作电流。将题目中的数据代入公式,得到:R = (5V - 3V) / 0.01A = 200Ω因此,限流电阻最合理的阻值是200Ω,选项B正确。
14、下列选项中,属于闭环控制的案例是?
A、按键控制LED灯
B、呼吸灯
C、红外遥控灯
D、超声波自动跟随小车
解析:【喵呜刷题小喵解析】:在给出的选项中,A、B、C选项都是开环控制的案例。A选项“按键控制LED灯”是通过按键输入来控制LED灯的开关,没有反馈机制;B选项“呼吸灯”是通过预设的程序控制LED灯的亮度变化,也没有反馈机制;C选项“红外遥控灯”是通过红外遥控器控制LED灯的开关和亮度,同样没有反馈机制。而D选项“超声波自动跟随小车”则是一个闭环控制的案例,因为超声波传感器可以检测到障碍物并反馈给控制系统,控制系统根据反馈信息调整小车的运动轨迹,从而实现自动跟随功能。因此,正确答案是D选项。
15、关于pulseIn()函数,下列说法正确的是?
A、pulseIn()函数用于向管脚输出高低电平
B、pulseIn()函数用来读取一个管脚的脉冲(HIGH或LOW)
C、pulseIn()函数只能读取管脚的高电平脉冲
D、pulseIn()函数的返回值是0或者1
解析:【喵呜刷题小喵解析】:在微控制器编程中,`pulseIn()`函数通常用于读取特定管脚的脉冲信号。这个函数等待一个从低电平到高电平(或高电平到低电平)的上升沿或下降沿,然后计算脉冲的持续时间。因此,`pulseIn()`函数是用来读取一个管脚的脉冲(HIGH或LOW)的,而不是用于向管脚输出高低电平。因此,选项B是正确的。选项A、C和D的说法都与`pulseIn()`函数的实际功能不符。
16、Arduino UNO/Nano主控板,通过引脚3发送4个20微秒的低电平脉冲触发信号,时序如下图所示,下列程序正确的是?( )

A 
B 
C 
D 
解析:【喵呜刷题小喵解析】根据题目描述,我们需要编写一个Arduino程序来发送4个20微秒的低电平脉冲。首先,我们需要了解Arduino的延时函数。在Arduino中,延时可以使用`delay()`函数,但是`delay()`函数是以毫秒为单位的,而题目中要求的是微秒,所以我们需要使用`delayMicroseconds()`函数。其次,我们需要知道如何发送低电平脉冲。在Arduino中,可以通过将引脚设置为低电平(0V)来发送低电平脉冲。这可以通过`digitalWrite()`函数来实现,其中第一个参数是引脚编号,第二个参数是电平状态,0代表低电平,1代表高电平。根据以上信息,我们可以编写一个程序,让引脚3在每隔一段时间发送一个20微秒的低电平脉冲。选项A的程序中,`delay()`函数的单位是毫秒,而不是微秒,所以不符合题目要求。选项B的程序中,没有调用`digitalWrite()`函数,也没有调用`delayMicroseconds()`函数,不符合题目要求。选项D的程序中,虽然调用了`digitalWrite()`函数和`delayMicroseconds()`函数,但是`delayMicroseconds()`函数的调用位置不对,应该在`digitalWrite()`函数之后,这样才能保证先输出低电平,再延时,然后输出高电平。所以,选项C的程序是正确的,程序逻辑清晰,调用了`digitalWrite()`函数和`delayMicroseconds()`函数,且`delayMicroseconds()`函数的调用位置正确,可以成功发送4个20微秒的低电平脉冲。
17、Arduino 编程中,0xFFE210 是一个?
A、2 进制数
B、16 进制数
C、变量
D、没有实际意义
解析:【喵呜刷题小喵解析】:在Arduino编程中,数字前面通常会有0x前缀来表示这是一个十六进制数。0x是“十六进制的缩写。0xFFE210前面的0x表明它是一个十六进制数。因此,答案是B,即0xFFE210是一个十六进制数。
18、电路搭建如图,当程序执行analogWrite(3,256)后,下列描述正确的是?
A、LED灯熄灭
B、LED灯点达到最亮
C、LED灯亮度不断变化
D、LED灯烧毁
解析:【喵呜刷题小喵解析】题目中的电路搭建图中没有提供足够的详细信息来明确确定LED灯的行为。然而,基于所提供的函数`analogWrite(3,256)`,我们可以进行如下推理:`analogWrite()`函数是用于设置PWM(脉冲宽度调制)输出的,用于控制连接到Arduino等微控制器的模拟引脚上的LED或其他设备的亮度。函数中的第一个参数是引脚号,第二个参数是亮度值,范围从0到255。在这个例子中,亮度值被设置为256,这是一个超出正常范围的值。通常,当`analogWrite()`函数用于控制LED的亮度时,亮度值在0到255的范围内变化,其中0表示LED完全熄灭,255表示LED达到最亮。超出这个范围的值可能会导致不可预测的行为,具体取决于硬件和库的实现。因此,当执行`analogWrite(3,256)`时,由于256超出了正常的亮度范围,LED的行为可能是不可预测的。然而,从选项来看,只有选项A表示LED灯熄灭,这是一个相对安全的选择,因为超出范围的亮度值不太可能使LED达到最亮、不断变化或烧毁。因此,根据所给的选项,最合理的答案是LED灯熄灭(选项A)。但是,这仅仅是一个基于所给信息的推理,实际的行为可能会因具体的硬件和库的实现而有所不同。
19、Arduino UNO/Nano主控板,读取超声波传感器的返回值,电路搭设和部分程序如下图所示,程序中A/B/C/D分别是?( )

A、5/4/HIGH/LOW
B、4/5/HIGH/LOW
C、5/4/LOW/HIGH
D、4/5/LOW/HIGH
解析:【喵呜刷题小喵解析】根据题目中的描述,A、B、C、D分别对应的是两个引脚的状态。其中,A和C表示的是数字5和数字4的状态,B和D表示的是数字4和数字5的状态。根据常识,HIGH表示高电平,LOW表示低电平。因此,A/B/C/D分别是5/4/LOW/HIGH,对应选项C。
20、Arduino UNO/Nano主控板,通过程序控制LED灯亮灭,电路搭设示意和程序如下,程序运行后LED点亮,按键开关按下后,LED灯熄灭。程序中[ ]中所对应的值先后是?( )

A、LOW HIGH
B、HIGH LOW
C、LOW LOW
D、HIGH HIGH
解析:【喵呜刷题小喵解析】根据电路搭设示意,当按键开关按下时,连接到输入端A的开关应该是闭合的,即输入端A的状态应为LOW。程序的目标是根据输入端的状态来控制LED灯的状态。由于按下按键后LED灯熄灭,所以程序中的条件判断应该是当输入端A为LOW时,将输出端B设置为HIGH,从而熄灭LED灯。因此,程序中[ ]中所对应的值先后应该是LOW HIGH,即选项A。
二、多选题
21、以下电子元器件属于半导体的有?
A、LED
B、三级管
C、光敏电阻
D、电位器
解析:【喵呜刷题小喵解析】:首先,我们需要了解什么是半导体。半导体是一种介于导体和绝缘体之间的材料,其电阻率随着温度的升高而降低,但并不会像导体那样完全消失。半导体材料在电子工业中广泛应用,因为它们可以控制电流的流动。接下来,我们分析每个选项:A. LED(发光二极管):LED是一种半导体器件,由P型半导体和N型半导体组成,中间有一个PN结。当正向偏置时,电流通过PN结,使其发光。B. 三级管:三级管也是半导体器件,由发射极、基极和集电极组成。它们基于PN结的原理工作,可以放大电流或电压。C. 光敏电阻:光敏电阻是一种半导体器件,其电阻值随着光强度的变化而变化。当光照增强时,电阻值减小,反之亦然。D. 电位器:电位器是一种可变电阻器,通过滑动或旋转其接触点来改变电阻值。它不是基于半导体原理工作的,因此不属于半导体器件。综上所述,选项A、B和C都属于半导体器件,而选项D不是。因此,正确答案是A、B和C。
22、一般来讲,NPN型三极管的三个引脚分别是?( )
A、发射极
B、基极
C、集电极
D、阳极
解析:【喵呜刷题小喵解析】:在NPN型三极管中,通常有三个引脚,分别是发射极、基极和集电极。这三个引脚分别对应着不同的功能,发射极用于接收电流,基极用于控制电流,集电极用于输出电流。因此,正确选项是发射极、基极和集电极,即选项A、B、C。选项D中的“阳极”并不是NPN型三极管的标准引脚名称,因此是错误的。
23、Arduino C语言,下列选项中,属于循环结构的有?( )
A、switch语句
B、while语句
C、do...while语句
D、for语句
解析:【喵呜刷题小喵解析】:
在Arduino C语言中,循环结构主要用于重复执行一段代码。循环结构通常包括while语句、do...while语句和for语句。switch语句是一种多路选择结构,用于根据表达式的值执行不同的代码块,不属于循环结构。因此,选项B while语句、选项C do...while语句和选项D for语句属于循环结构。
24、Arduino UNO/Nano主控板支持PWM的引脚有?
A、3
B、5
C、6
D、9
解析:【喵呜刷题小喵解析】:在Arduino UNO和Nano主控板上,支持PWM(脉冲宽度调制)的引脚有多个。具体来说,引脚3、5、6和9都支持PWM功能。因此,答案是A、B、C和D。这些引脚可以用来控制舵机、LED亮度、电机速度等,通过调整PWM信号的占空比来实现。
25、与表达式 i=i+1; 结果相同的有?( )
A、i++;
B、i+=1;
C、i+1;
D、i+1=i;
解析:【喵呜刷题小喵解析】本题考查的是C语言中的变量赋值和自增操作。选项A:`i++` 是后自增操作,执行完 `i++` 后,`i` 的值会增加1,但是整个表达式 `i++` 的值是 `i` 自增前的值。所以 `i++` 的效果和 `i=i+1` 是相同的,都会使 `i` 的值增加1。选项B:`i+=1` 是赋值加操作,等同于 `i=i+1`,会使 `i` 的值增加1。选项C:`i+1` 是表达式,计算 `i` 的值和1的和,但并不会改变 `i` 的值。选项D:`i+1=i` 是一个错误的表达式,因为它试图将 `i+1` 的值赋给 `i`,这在C语言中是不允许的。因此,与表达式 `i=i+1` 结果相同的有选项A和B。
三、判断题
26、Arduino UNO/Nano主控板,Arduino C语言程序中整型数占用4个字节。( )
A 正确
B 错误
解析:【喵呜刷题小u解析】:在Arduino C语言程序中,整型数的占用空间并不固定为4个字节,而是取决于编译器和平台。不同的编译器和平台可能会有不同的处理方式,因此整型数在内存中的占用空间可能有所不同。对于Arduino UNO和Nano等常见的主控板,整型数的大小可能会根据编译器和平台而有所不同,不一定占用4个字节。因此,该题目中的陈述是错误的。
27、C 语言系统关键字 while 用于循环结构。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在C语言中,`while`确实是一个系统关键字,用于表示循环结构。在`while`循环中,当给定的条件为真时,循环体中的语句会反复执行,直到条件不再为真为止。因此,题目中的说法是正确的。
28、delay()函数的功能是暂停程序运行指定的时间。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:题目中提到的`delay()`函数的功能是暂停程序运行指定的时间。在许多编程语言中,`delay()`函数(或类似名称的函数)确实被用来实现这种功能。它通常用于控制程序的执行速度,确保程序不会运行得太快或太慢。因此,题目中的陈述是正确的。
29、如果执行程序analogWrite(3,256)后,用万用表测量3号引脚的电压,可能是0V?
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在Arduino编程中,analogWrite()函数用于输出PWM(脉宽调制)信号,用于控制模拟输出引脚的电压。在analogWrite(3,256)中,3是引脚号,256是占空比(0-255)。占空比256意味着PWM信号的脉冲宽度为最大,即50%的占空比。因此,当执行analogWrite(3,256)后,3号引脚会输出最大占空比的PWM信号,其电压应该接近参考电压的一半(假设参考电压为5V,则电压接近2.5V)。因此,用万用表测量3号引脚的电压,不可能是0V。所以,答案是A,正确。
30、Arduino UNO/Nano 主控板,C 语言程序中整型数占用 2 个字节。
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在大多数计算机系统中,整型数(如int)通常占用4个字节。但是,具体的字节大小可能因硬件、编译器和操作系统而异。在特定的嵌入式系统(如Arduino UNO/Nano)上,由于资源有限,可能会采用较小的整型数大小以节省内存。因此,题目中的说法“整型数占用2个字节”可能是针对Arduino UNO/Nano主控板的特定情况。在没有更具体的上下文信息的情况下,我们可以假设这个陈述是正确的。所以,答案为A。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




