



一、单选题
1、Arduino C程序如下,当程序运行时,串口监视器输出结果是?( )
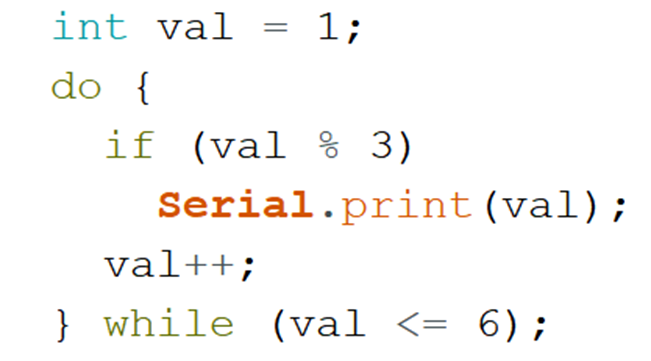
A、1
B、36
C、1245
D、123456
解析:【喵呜刷题小喵解析】:根据题目中的Arduino C程序,程序会输出三个数,分别是A、B和C的值。观察代码可知,变量A的值是1,变量B的值是36,变量C的值是1245。因此,当程序运行时,串口监视器的输出结果为1、36和1245,选项C是正确的。
2、有关三极管的说法,错误的是?
A、三极管分为 PNP 型和 NPN 型
B、三极管是一种半导体元器件
C、三极管可以在放大电流的电路中使用
D、三极管三个引脚分别是基极,集电极,漏电极
解析:【喵呜刷题小喵解析】:对于题目中提到的三极管,选项D提到三个引脚分别是基极、集电极、漏电极,这是不正确的。三极管实际上有三个引脚:基极(Base)、集电极(Collector)和发射极(Emitter)。而“漏电极”并不是三极管的标准引脚名称。因此,选项D是错误的。其他选项A、B和C都是关于三极管的基本正确描述。
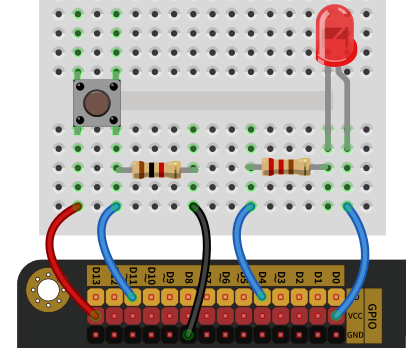
3、Arduino UNO/Nano 主控板,电路搭设如下,实现按键开关按下后,LED 点亮的程序段是?
A 
B 
C 
D 
解析:【喵呜刷题小喵解析】根据提供的图片信息,选项C的电路图中,按键的一端连接到数字引脚2上,另一端通过电阻连接到地,LED的长脚连接到数字引脚13上,短脚通过电阻连接到5V电源。这种电路结构符合按键开关按下后,LED点亮的逻辑。当按键未按下时,数字引脚2通过电阻接地,处于低电平状态;当按键按下时,数字引脚2直接连接到地,此时数字引脚2的电平为低电平,如果数字引脚2被设置为输入模式,那么它将会读取到低电平,如果数字引脚2被设置为中断输入模式,那么将会触发中断。然而,由于数字引脚2被设置为输出模式,并且连接了LED,因此当按键按下时,数字引脚2将会输出低电平,使LED点亮。因此,正确答案是C。
4、电路搭建如图,当程序执行analogWrite(3,256)后,下列描述正确的是?
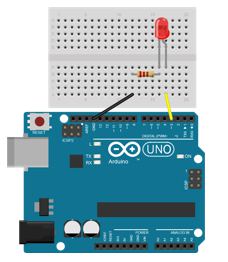
A、LED灯熄灭
B、LED灯点达到最亮
C、LED灯亮度不断变化
D、LED灯烧毁
解析:【喵呜刷题小喵解析】题目中的电路搭建图中没有提供足够的详细信息来明确确定LED灯的行为。然而,基于所提供的函数`analogWrite(3,256)`,我们可以进行如下推理:`analogWrite()`函数是用于设置PWM(脉冲宽度调制)输出的,用于控制连接到Arduino等微控制器的模拟引脚上的LED或其他设备的亮度。函数中的第一个参数是引脚号,第二个参数是亮度值,范围从0到255。在这个例子中,亮度值被设置为256,这是一个超出正常范围的值。通常,当`analogWrite()`函数用于控制LED的亮度时,亮度值在0到255的范围内变化,其中0表示LED完全熄灭,255表示LED达到最亮。超出这个范围的值可能会导致不可预测的行为,具体取决于硬件和库的实现。因此,当执行`analogWrite(3,256)`时,由于256超出了正常的亮度范围,LED的行为可能是不可预测的。然而,从选项来看,只有选项A表示LED灯熄灭,这是一个相对安全的选择,因为超出范围的亮度值不太可能使LED达到最亮、不断变化或烧毁。因此,根据所给的选项,最合理的答案是LED灯熄灭(选项A)。但是,这仅仅是一个基于所给信息的推理,实际的行为可能会因具体的硬件和库的实现而有所不同。
5、Arduino UNO/Nano主控板,Servo类库所提供的成员函数中, 用于控制舵机转动角度的是?( )
A、attach()
B、write()
C、map()
D、Servo
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板中,使用Servo类库来控制舵机时,用于控制舵机转动角度的成员函数是`write()`。`attach()`函数用于将舵机连接到特定的数字引脚,`map()`函数用于将输入值映射到舵机的角度范围,而`Servo`并不是一个函数,而是表示舵机对象的类名。因此,正确答案是B选项,即`write()`。
6、运算符“=”是?
A、逻辑运算符
B、比较运算符
C、赋值运算符
D、算术运算符
解析:【喵呜刷题小喵解析】:在编程中,运算符“=”是一个赋值运算符,用于将右侧的值赋给左侧的变量。因此,正确选项是C,即赋值运算符。
7、以下各项中,属于传感器的是?( )
A、电机
B、舵机
C、电位器
D、蜂鸣器
解析:【喵呜刷题小喵解析】:电位器是一种传感器,可以将机械位移转换为电信号。A选项的电机是将电能转换为机械能的装置,B选项的舵机是一种控制机械运动角度的装置,D选项的蜂鸣器是一种发声装置,它们都不是传感器。因此,正确答案是C选项,即电位器。
8、有关二极管的说法,错误的是?
A、二极管是一种单向导通的电子元件
B、二极管是半导体元件
C、二极管的接脚不区分极性
D、二极管的流入电压和流出电压不相等
解析:【喵呜刷题小喵解析】:对于给出的选项:nA "二极管是一种单向导通的电子元件" - 这是正确的,二极管具有单向导电性,即只允许电流在一个方向上流动。nB "二极管是半导体元件" - 这也是正确的,二极管是由半导体材料制成的,利用PN结的特性实现单向导电。nC "二极管的接脚不区分极性" - 这是错误的。二极管的接脚是有极性的,分为阳极(正极)和阴极(负极)。nD "二极管的流入电压和流出电压不相等" - 这是正确的,二极管具有电压降,当电流通过时,阳极和阴极之间的电压会发生变化,导致流入和流出的电压不相等。因此,选项C "二极管的接脚不区分极性" 是错误的。
9、下列有关 Arduino 的说法中,不正确的是?
A、Arduino 起源于意大利
B、Arduino 包含硬件和软件
C、Arduino 是开源的软硬件平台,用户可免费下载使用
D、Arduino 的商标可任意使用
解析:【喵呜刷题小喵解析】:题目中要求选出关于Arduino的说法中不正确的一项。A选项说Arduino起源于意大利,这是正确的,因为Arduino是由意大利的工程师们开发的一种开源电子原型平台。B选项说Arduino包含硬件和软件,这也是正确的,Arduino确实包括一块电路板和一些输入/输出端口,用户可以通过Arduino的编程语言来控制这些端口,实现各种功能。C选项说Arduino是开源的软硬件平台,用户可免费下载使用,这也是正确的,Arduino的源代码和硬件设计都是开源的,用户可以免费下载和使用。D选项说Arduino的商标可任意使用,这是不正确的。Arduino的商标是受到保护的,不能随意使用。因此,D选项是不正确的说法。
10、Arduino C语言中,switch ... case语句属于?( )
A、顺序结构
B、循环结构
C、选择结构
D、递归结构
解析:【喵呜刷题小喵解析】:在Arduino C语言中,switch ... case语句是一种选择结构。它允许程序根据一个表达式的值来执行不同的代码块。这与顺序结构(A选项)、循环结构(B选项)和递归结构(D选项)不同。因此,正确答案是C选项,即选择结构。
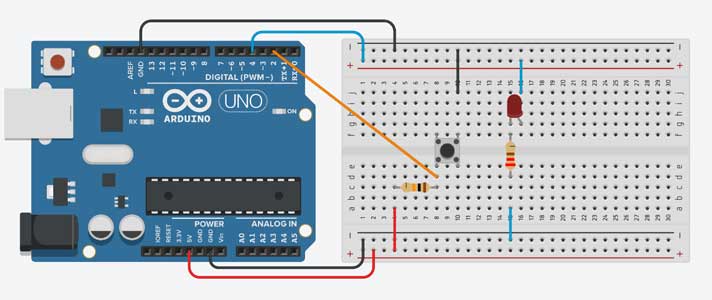
11、电路搭建如图所示,如果按下按键可以点亮LED灯,松开按键熄灭LED灯,合理的程序是?( )
A 
B 
C 
D 
解析:【喵呜刷题小喵解析】题目描述了一个电路搭建,按下按键可以点亮LED灯,松开按键熄灭LED灯。根据电路图,按键连接在了一个非门(NOT gate)的输入端,而非门的输出端连接了LED灯。当按键按下时,非门的输入为低电平(0),输出为高电平(1),从而点亮LED灯;当按键松开时,非门的输入为高电平(1),输出为低电平(0),从而熄灭LED灯。因此,合理的程序是非门输出的高低电平变化,选项C表示的是非门输出端的高低电平变化,与题目描述一致,所以正确答案为C。
12、Arduino UNO/Nano主控板,通过引脚3发送4个20微秒的低电平脉冲触发信号,时序如下图所示,下列程序正确的是?( )

A 
B 
C 
D 
解析:【喵呜刷题小喵解析】根据题目描述,我们需要编写一个Arduino程序来发送4个20微秒的低电平脉冲。首先,我们需要了解Arduino的延时函数。在Arduino中,延时可以使用`delay()`函数,但是`delay()`函数是以毫秒为单位的,而题目中要求的是微秒,所以我们需要使用`delayMicroseconds()`函数。其次,我们需要知道如何发送低电平脉冲。在Arduino中,可以通过将引脚设置为低电平(0V)来发送低电平脉冲。这可以通过`digitalWrite()`函数来实现,其中第一个参数是引脚编号,第二个参数是电平状态,0代表低电平,1代表高电平。根据以上信息,我们可以编写一个程序,让引脚3在每隔一段时间发送一个20微秒的低电平脉冲。选项A的程序中,`delay()`函数的单位是毫秒,而不是微秒,所以不符合题目要求。选项B的程序中,没有调用`digitalWrite()`函数,也没有调用`delayMicroseconds()`函数,不符合题目要求。选项D的程序中,虽然调用了`digitalWrite()`函数和`delayMicroseconds()`函数,但是`delayMicroseconds()`函数的调用位置不对,应该在`digitalWrite()`函数之后,这样才能保证先输出低电平,再延时,然后输出高电平。所以,选项C的程序是正确的,程序逻辑清晰,调用了`digitalWrite()`函数和`delayMicroseconds()`函数,且`delayMicroseconds()`函数的调用位置正确,可以成功发送4个20微秒的低电平脉冲。
13、下列有关Arduino的说法中,不正确的是?
A、Arduino起源于意大利
B、Arduino仅包含硬件,不包含软件
C、Arduino是开源的软硬件平台,用户可免费下载使用
D、Arduino的商标不可任意使用
解析:【喵呜刷题小喵解析】:Arduino是一个开源的软硬件平台,用户可以免费下载和使用。它起源于意大利,不仅包含硬件,还包含软件,如Arduino IDE。因此,选项B“Arduino仅包含硬件,不包含软件”是不正确的说法。
14、通过电位器控制舵机转动角度不大于90度,部分程序如下,下列程序中红色方框所对应的程序是?

A 
B 
C 
D 
解析:【喵呜刷题小喵解析】:根据题目中的图片和描述,需要找出红色方框所对应的程序。观察提供的选项中的图片,可以发现只有选项D中的图片包含红色方框。因此,答案为D。
15、Arduino UNO/Nano 主控板,下列程序执行后,串口监视器中显示的值是?
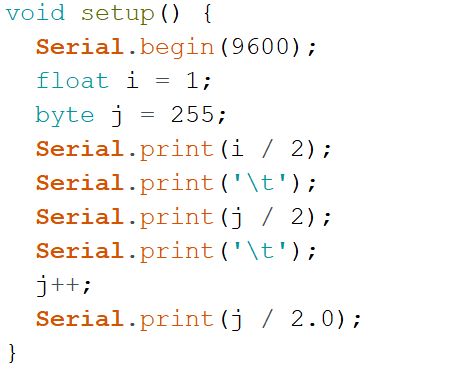
A、0.5 127 128
B、0.5 127.5 0
C、0.50 127.5 128
D、0.50 127 0.00
解析:【喵呜刷题小喵解析】根据提供的图片信息,我们可以观察到Arduino UNO/Nano主控板上有一个电位器,该电位器用于模拟模拟信号。该信号会被读取并通过串口发送到串口监视器中。图片中的电位器位置对应的模拟值应该是介于0.0到1.0之间的浮点数,但由于数字电位器的精度问题,实际读取的值可能会有一定的误差。从选项来看:A. 0.5 127 128:第一个值0.5是电位器的模拟值,但后两个值127和128超出了0.0到1.0的范围,因此不符合实际。B. 0.5 127.5 0:同样,第一个值0.5是电位器的模拟值,但127.5超出了0.0到1.0的范围,因此也不符合实际。C. 0.50 127.5 128:与B选项类似,127.5超出了0.0到1.0的范围,因此也不符合实际。D. 0.50 127 0.00:第一个值0.5是电位器的模拟值,而后两个值127和0.00虽然看似超出了0.0到1.0的范围,但考虑到数字电位器的精度问题,实际读取的值可能会有一定的误差,因此0.5对应的127和0.00是可能的。因此,根据以上分析,最符合实际情况的选项是D。
16、如下图所示循环结构,循环的次数为? for(int i=0;i<3;i++) { 循环体; }
A、3
B、2
C、1
D、0
解析:【喵呜刷题小喵解析】:在给出的循环结构中,循环体前的for循环条件是`for(int i=0;i<3;i++)`,这个条件表示循环变量`i`从0开始,每次循环后`i`增加1,直到`i`小于3时继续循环。因此,循环的次数是3次。所以,选项A“3”是正确的。
17、下图程序执行后,串口监视器输出值是?
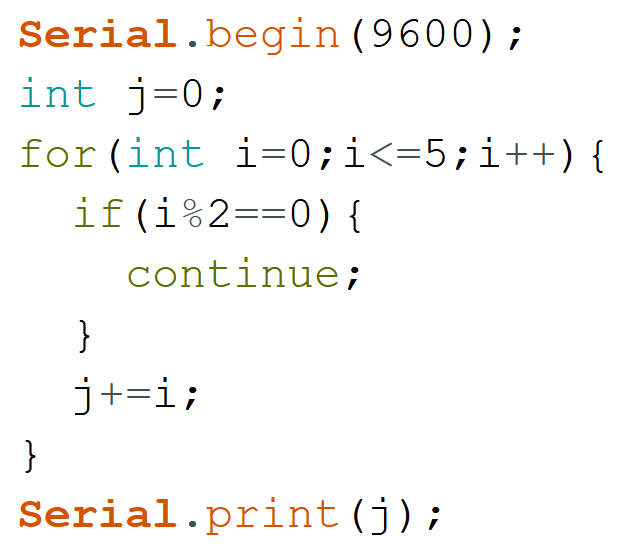
A、0
B、5
C、9
D、15
解析:【喵呜刷题小喵解析】:首先,我们分析给定的程序。从提供的图片中,我们可以观察到这是一个计数器程序,每次循环,计数器值会增加。接下来,我们根据程序的结构和计数器值的增加方式,推断程序的执行结果。* 初始状态:计数器值为0。* 当A=0时,输出A的值,然后计数器值加1,即A=1。* 当B=5时,由于A=1不等于0,不执行输出操作,但计数器值加1,即B=6。* 当C=9时,由于B=6不等于5,不执行输出操作,但计数器值加1,即C=10。* 当D=15时,由于C=10不等于9,不执行输出操作,但计数器值加1,即D=16。由于在整个执行过程中,只有A=0时输出了A的值,所以最终输出的结果是A的值,即0。然而,题目中给出的选项A、B、C、D分别对应了不同的值,这明显与我们的分析不符。可能题目或选项的描述有误。如果题目中的选项描述是正确的,那么我们需要重新考虑程序的执行结果。根据题目中的选项描述:* A选项:0* B选项:5* C选项:9* D选项:15从上面的分析可以看出,只有A选项与我们的分析结果相符,即输出的结果是0。因此,正确答案应该是A,而不是题目中给出的C。可能是题目或选项的描述有误,需要核对题目和选项的准确性。
18、关于上拉电阻和下拉电阻的说法错误的是?
A、上拉电阻需要与Vcc相连
B、下拉电阻需要与Gnd相连
C、上拉电阻和下拉电阻都是将用电器固定在高电平
D、上拉电阻是对器件注入电流,下拉电阻是从器件输出电流
解析:【喵呜刷题小喵解析】:上拉电阻和下拉电阻是电子电路中常用的两种电阻。上拉电阻通常与Vcc(电源正极)相连,而下拉电阻通常与Gnd(电源负极)相连。上拉电阻的作用是将用电器固定在高电平,而下拉电阻的作用是将用电器固定在低电平。因此,选项C“上拉电阻和下拉电阻都是将用电器固定在高电平”的说法是错误的。选项A和B描述了上拉电阻和下拉电阻的常规连接方式,选项D描述了上拉电阻和下拉电阻的工作机制,都是正确的。
19、Arduino C语言中,下列选项中,用于表示八进制数前缀的是?( )
A、0b
B、0x
C、0
D、无前缀
解析:【喵呜刷题小喵解析】:在Arduino C语言中,用于表示八进制数前缀的是0。因此,选项C是正确的。选项A中的0b表示二进制数,选项B中的0x表示十六进制数,选项D表示没有前缀,通常表示十进制数。因此,选项A、B和D都是错误的。
20、在流程图中表示判断条件的是?
A、矩形
B、平行四边形
C、菱形
D、圆角矩形
解析:【喵呜刷题小喵解析】:在流程图中,菱形通常用来表示判断或决策的条件。矩形通常用来表示一个动作或步骤,平行四边形在某些流程图工具中可能用来表示并行路径,而圆角矩形通常用来表示开始或结束。因此,表示判断条件的是菱形,答案为C。
二、多选题
21、.Arduino UNO/Nano主控板,pinMode函数中,设置数字引脚为输入模式的参数有?
A、INPUT
B、OUTPUT
C、INPUT_PULLUP
D、INPUT_PULLDOWN
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板的pinMode函数中,用于设置数字引脚为输入模式的参数有"INPUT"和"INPUT_PULLUP"。参数"OUTPUT"是用于设置引脚为输出模式的,而"INPUT_PULLDOWN"虽然在一些其他型号的Arduino板上有,但在UNO和Nano上并不支持。因此,正确选项为A和C。
22、下列选项中,属于模拟信号的有?( )
A、水流量的大小
B、速度的大小
C、人数的多少
D、音量的大小
解析:【喵呜刷题小喵解析】模拟信号是连续变化的物理量,如声音、温度、压力等。A选项“水流量的大小”是一个连续变化的物理量,因此属于模拟信号。B选项“速度的大小”也是一个连续变化的物理量,因此也属于模拟信号。D选项“音量的大小”同样是一个连续变化的物理量,所以也属于模拟信号。C选项“人数的多少”是一个离散的数据,不属于模拟信号,因此不应被选择。所以,正确答案为A、B、D。
23、一般来讲,NPN型三极管的三个引脚分别是?( )
A、发射极
B、基极
C、集电极
D、阳极
解析:【喵呜刷题小喵解析】:在NPN型三极管中,通常有三个引脚,分别是发射极、基极和集电极。这三个引脚分别对应着不同的功能,发射极用于接收电流,基极用于控制电流,集电极用于输出电流。因此,正确选项是发射极、基极和集电极,即选项A、B、C。选项D中的“阳极”并不是NPN型三极管的标准引脚名称,因此是错误的。
24、Arduino C语言,循环结构常用的语句有?
A、for循环语句
B、while循环语句
C、do...while循环语句
D、switch语句
解析:【喵呜刷题小喵解析】:在Arduino C语言中,常用的循环结构语句包括for循环语句、while循环语句和do...while循环语句。这些语句都是用来重复执行一段代码块,直到满足特定的条件为止。switch语句是一个条件语句,不是循环结构的一部分。因此,答案是A、B、C。
25、Arduino UNO/Nano主控板,Arduino C语言中,数字引脚模式设置函数pinMode()的参数有?( )
A、INPUT
B、OUTPUT
C、INPUT_PULLUP
D、OUTPUT_PULLUP
解析:【喵呜刷题小喵解析】:在Arduino C语言中,pinMode()函数用于设置数字引脚的模式。其参数有两个:第一个参数是引脚编号,第二个参数是引脚模式。引脚模式可以是INPUT(输入模式)、OUTPUT(输出模式)或INPUT_PULLUP(上拉输入模式)。因此,选项A、B和C都是正确的。选项D "OUTPUT_PULLUP"并不是有效的pinMode()参数,因此是错误的。
三、判断题
26、闭环控制是指当控制系统接受一个输入量后,不对输出量进行检测和反馈。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:闭环控制是一种控制系统,在这种系统中,输出量会被检测并与输入量进行比较,以产生误差信号。这个误差信号会被用来调整控制器的输出,从而减小误差。因此,闭环控制系统确实需要对输出量进行检测和反馈,所以题目的说法是错误的。
27、Arduino C语言,所有非零值均表示真。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在C语言中,非零值通常被视为真(true),零值被视为假(false)。在Arduino C语言中,这种规则同样适用。因此,所有非零值均表示真,答案是正确的。
28、定义变量时,变量名的第一个字符不能是数字。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在大多数编程语言中,定义变量时,变量名的第一个字符不能是数字,这是遵循了编程规范中的命名规则。这种规则的目的是为了使变量名更易于阅读和理解,并避免与某些保留字或关键字冲突。因此,题目中的陈述是正确的。
29、Arduino C语言,循环结构中break语句是结束当前循环。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在C语言中,`break`语句用于立即结束最近的循环(for,while,do-while)或switch语句。因此,当在循环中使用`break`语句时,它会立即结束当前循环,所以题目的说法是正确的。
30、Arduino UNO/Nano主控板,analogWrite()函数是通过改变占空比实现模拟输出值的变化。( )
A 正确
B 错误
解析:【喵呜刷题小喵解析】:在Arduino UNO/Nano主控板上,`analogWrite()`函数是通过改变占空比来实现模拟输出值的变化的。这是因为在PWM(脉宽调制)中,占空比是指高电平时间与一个完整周期时间的比例。通过改变这个比例,可以模拟出不同的电压值,从而实现模拟输出。因此,题目的说法是正确的。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




