



一、单选题
1、如图,这是飞机起飞时的机翼示意图,下列说法正确的是?( ) 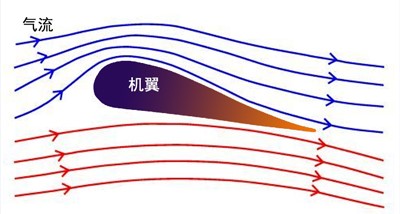
A、机翼上侧所受的气压为0
B、机翼受到向下的力的作用
C、机翼下侧所受的气压为0
D、机翼上侧所受的气压小于下侧
解析:
在飞机起飞时,机翼上侧的空气流动速度比下侧快,因此上侧所受的气压小于下侧。这是因为空气流动速度越快,气压越低。所以,选项D正确。其他选项没有提到机翼上、下侧气压的差异,故排除。
2、图中是苏颂等人发明的木构水运仪像台,它的作用是?( ) 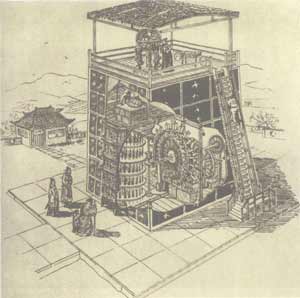
A、灌溉农田
B、算数
C、观测天文
D、计时
解析:
水运仪象台是北宋时期苏颂等人发明的自动化天文仪器,它的作用是集天文观测、天文演示和报时系统为一体的大型自动化天文仪器。因此,正确答案是C。
3、以下装置两轮转向相同的是?( )
A、皮带交叉传动装置
B、链传动装置
C、垂直啮合的齿轮
D、蜗轮蜗杆机构
解析:
链传动、皮带平行传动的两轮转向相同。因此,正确答案是B
4、如图,该机构中主动摆杆是指?( ) 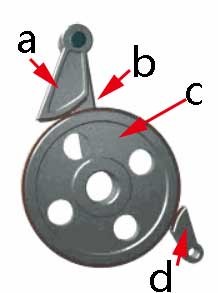
A、a
B、b
C、c
D、d
解析:
根据提供的图片和选项,主动摆杆指的是驱动整个机构运动的杆件。从图中可以看出,b杆是主动摆杆,因为它通过驱动其他杆件来使机构运动。因此,正确答案是B。
5、一节干电池的电压约为?( )
A、1.5V
B、1000v
C、36V
D、220V
解析:
一节干电池的电压约为1.5V,这是常识性的物理知识,所以答案是A。其他选项中,1000v和36V、220V都是过高的电压,不符合干电池的电压标准。
6、关于电动机的能量转化说法正确的是?( )
A、把机械能转化为电能
B、把动能转化为势能
C、把电能转化为机械能
D、把势能转化为动能
解析:
电动机的工作原理是将电能转化为机械能。在电动机中,通过电流在磁场中的受力作用,使电动机的转子转动,从而实现将电能转化为机械能。因此,正确答案是C。
7、关于凸轮机构,下列说法正确的是?( )
A、从动件的运动规律取决于凸轮的轮廓曲线
B、从动件的运动周期一定,凸轮的运动周期相同
C、从动件只能摆动不能直动
D、从动件只有尖顶从动件一种类型
解析:
关于凸轮机构,从动件的运动规律确实取决于凸轮的轮廓曲线,因此选项A正确。凸轮的运动周期和从动件的运动周期不一定相同,所以选项B错误。从动件可以摆动也可以直动,取决于凸轮机构的设计,因此选项C错误。从动件不仅仅有尖顶从动件一种类型,还有其他类型如平底从动件等,所以选项D错误。
8、如图,曲柄滑块机构中哪个是滑块?( ) 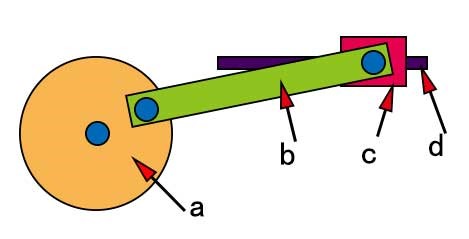
A、a
B、b
C、c
D、d
解析:
根据提供的图片,滑块是指曲柄滑块机构中可移动的构件,从图中可以明显看出构件"b"是滑动的,因此答案是C。
9、如图,关于该机构,下列说法正确的是?( ) 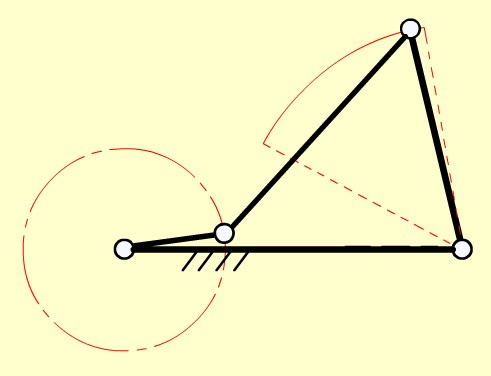
A、这是曲柄摇杆机构
B、这是双摇杆机构
C、这是双曲柄机构
D、这是曲柄滑块机构
解析:
根据提供的图片,该机构具有曲柄和摇杆的基本结构,因此可以判断为曲柄摇杆机构。所以正确答案是A。
10、滑杆机构中回转体做什么动作?( )
A、沿着轨道来回滑动
B、回转运动
C、静止不动
D、左右摇摆
解析:
滑杆机构中的回转体主要进行的是回转运动,即围绕一个点或轴线做圆周运动。其他选项中,A是滑块沿轨道的滑动,C是静止不动,D是左右摇摆,均与滑杆机构中回转体的实际动作不符。
11、如图,下列说法正确的是?( ) 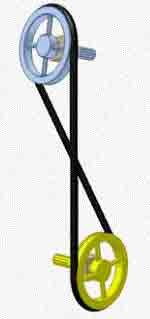
A、这是皮带平行传动
B、这是皮带半交叉传动
C、这是齿轮传动
D、这是链传动
解析:
根据提供的图片,可以看出这是一个皮带传动装置,皮带在轮槽中运行,呈现半交叉状态,因此选项A正确。
12、如图,该凸轮机构的锁合方式为?( ) 
A、重力锁和
B、弹力锁合
C、使用槽凸轮机构几何锁合
D、使用共轭凸轮机构的几何锁合
解析:
根据提供的图片,该凸轮机构的锁合方式为弹力锁合。因此,正确答案是B。
13、如图,关于该场景说法正确的是?( ) 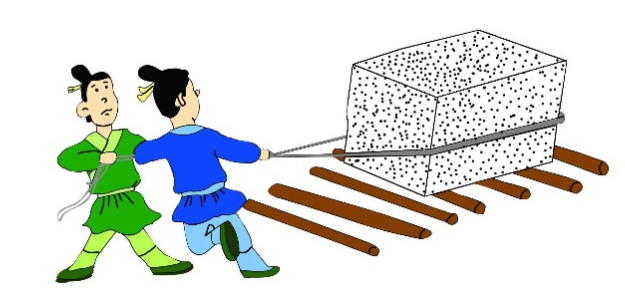
A、将滑动摩擦变为了滚动摩擦,用来增大摩擦力
B、将滑动摩擦变为了滚动摩擦,用来减小摩擦力
C、将滚动摩擦变为了静摩擦,用来增大摩擦力
D、将滚动摩擦变为滑动摩擦,用来增大摩擦力
解析:
根据提供的图片,可以看到该场景是将滑动摩擦变为了滚动摩擦。滚动摩擦相比于滑动摩擦,能够减小摩擦力,因此选项B正确。选项A、C和D的描述都与场景中的实际情况不符。
14、关于齿轮平行啮合,下列说法正确的是?( )
A、两个齿轮转动方向相同
B、大齿轮比小齿轮转速快
C、只能起加速作用
D、适合近距离传动
解析:
相互啮合的两个齿轮之间的转动方向是相反的,所以选项A错误。齿轮的转速与其大小没有必然关系,因此选项B错误。齿轮的作用不仅限于加速,还可以实现减速、改变转动方向等,所以选项C错误。齿轮传动更适合近距离传动。这是因为齿轮传动的主要优点包括结构紧凑、传动准确、效率高和工作可靠,这些特点使其非常适合近距离的传动应用,因此选项D正确。
15、机器人的控制系统相当于人类的?( )
A、大脑
B、皮肤
C、四肢
D、心脏
解析:
机器人的控制系统是机器人进行各种操作的核心部分,它负责接收和处理各种信息,并指挥机器人执行相应的动作。这与人类的大脑功能相似,因为大脑是人类接收和处理信息,并发出指令的核心器官。因此,机器人的控制系统相当于人类的大脑。
16、如图,采用了滚子型从动件的是?( ) 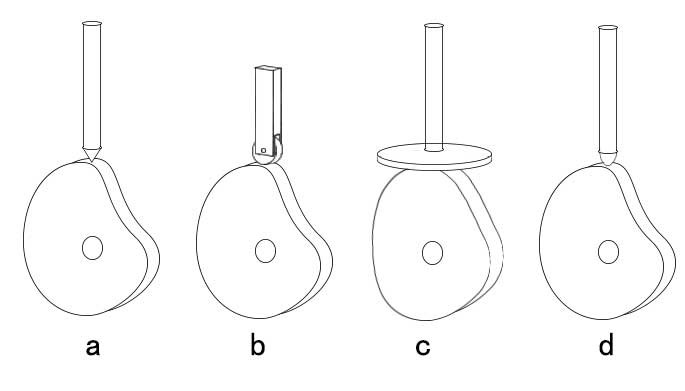
A、a
B、b
C、c
D、d
解析:
根据提供的图片,采用了滚子型从动件的是选项B。
17、如图,下列哪个选项是单动式棘轮机构?( ) 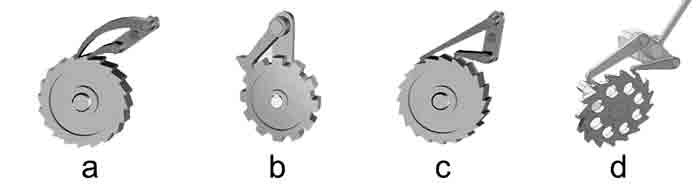
A、a
B、b
C、c
D、d
解析:
根据提供的图片,单动式棘轮机构的是选项B。
18、凸轮机构按照凸轮的形状分类不包括?( )
A、盘形凸轮
B、移动型凸轮
C、圆柱凸轮
D、圆锥凸轮
解析:
凸轮机构按照凸轮的形状分类包括盘形凸轮、圆柱凸轮和圆形凸轮等。凸轮机构按照凸轮的形状分类不包括圆锥凸轮,因此选D。
19、如图关于该机构,下列说法正确的是?( ) 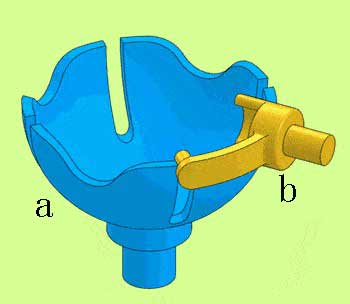
A、这是凸轮机构
B、这是不完全齿轮机构
C、这是棘轮机构
D、b是主动件
解析:
根据提供的图片,选D。
20、典型棘轮机构不包括?( )
A、主动摆杆
B、止回摆杆
C、棘轮
D、止回棘爪
解析:
棘轮机构是一种常见的机械传动装置,其基本构件包括棘轮、棘爪和曲柄。因此,正确答案是B。
21、以下要求零件必须在同一平面内连接的选项为?( )
A、链传动
B、皮带传动
C、齿轮传动
D、蜗轮蜗杆
解析:
在齿轮传动中,要求两个齿轮的轴线在同一平面内,以确保齿轮之间的正确咬合和传动效率。因此,选项C“齿轮传动”是要求零件必须在同一平面内连接的选项。而其他选项如链传动、皮带传动和蜗轮蜗杆并没有这样的要求。
22、关于重力说法错误的是?( )
A、同一个地方一个西瓜的重力大于一粒芝麻的重力
B、很轻的物体是没有重力的
C、重力是垂直于水平面竖直向下的
D、重力的大小与物体的质量有关
解析:
关于重力说法中,选项B是错误的。因为任何物体都会受到重力的作用,不论其质量大小或重量大小。重力是由地球对物体的引力产生的,与物体的质量有关。选项A、C、D都是正确的描述。同一个地方一个西瓜的重力大于一粒芝麻的重力是因为西瓜的质量大于芝麻的质量;重力是垂直于水平面竖直向下的;重力的大小与物体的质量有关。
23、关于棘轮机构,下列说法正确的是?( )
A、棘轮机构只能单向运动
B、棘轮机构只能双向运动
C、棘轮机构可以双向运动
D、棘轮机构只能有一个主动棘爪
解析:
棘轮机构是一种允许单向或双向运动的机械装置,其设计允许棘轮在特定条件下进行双向运动。
24、如图,该机构中回转体做什么动作?( ) 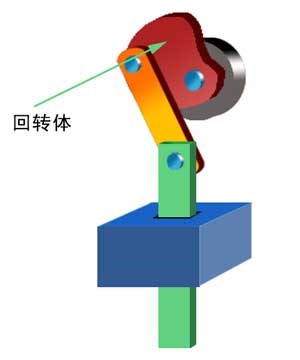
A、在既定的轨道上滑动
B、摇摆运动
C、上下直动
D、回转运动
解析:
根据提供的图片,该机构中的回转体正在进行旋转动作,即围绕中心轴进行转动,这是典型的回转运动。因此,正确答案是D,即回转运动。
25、如图,关于该机构,下列说法正确的是?( ) 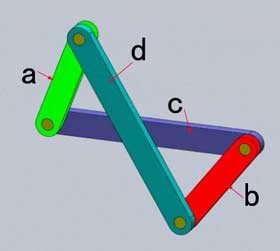
A、a做回转运动
B、b做摇摆运动
C、c做回转运动
D、d做回转运动
解析:
根据提供的图片和选项描述,a部分明显是在做回转运动,而b部分则做上下摆动,即摇摆运动。因此,关于该机构的说法正确的是A选项:“a做回转运动”。
26、如图,下列哪个是军用机器人?( ) 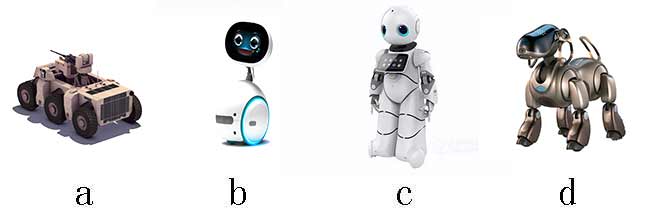
A、a
B、b
C、c
D、d
解析:
在图中A是坦克很可能是军用机器人。因此,正确答案是A。
27、机器人的机械腿一般会用到下列哪个机构?( )
A、凸轮机构
B、棘轮机构
C、槽轮机构
D、连杆机构
解析:
机器人的机械腿通常需要实现复杂的运动,包括弯曲、伸展和旋转等。为了实现这些运动,机械腿通常使用连杆机构。连杆机构可以通过一系列的杆和连接件来产生所需的运动,具有灵活性和动力性。因此,选项D连杆机构是机器人的机械腿常用的机构。
28、一个步行机器人,用左右两个电机分别控制左右腿,左侧电机转速是100rpm,右侧电机转速是0rpm,则此机器人?( )
A、原地右转
B、向右前方转向
C、原地左转
D、原地不动
解析:
一个步行机器人,如果用左右两个电机分别控制左右腿,且左侧电机的转速是100rpm,右侧电机的转速是50rpm,那么这个机器人会原地右转。
这个结论是基于差速运动控制的基本原理,即通过调整两侧电机的速度差异来实现机器人的转向。当左侧电机的速度高于右侧电机时,机器人会向左转;反之,当右侧电机的速度高于左侧电机时,机器人会向右转。这是因为两侧电机的速度差异使得机器人在前进方向上产生了一个旋转力矩,从而改变了机器人的运动方向。
29、如图,下列哪个不是间歇运动机构?( ) 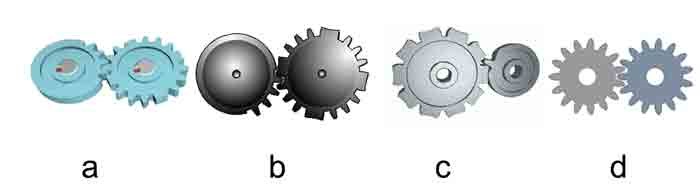
A、a
B、b
C、c
D、d
解析:
根据提供的图片,a、b、c均显示出间歇运动机构的特征,而d没有显示出间歇运动机构的特征,所以选项D不是间歇运动机构。
30、如图,下列哪个是移动型凸轮机构?( ) 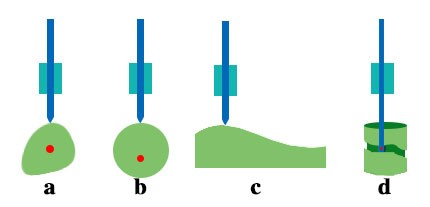
A、a
B、b
C、c
D、d
解析:
根据提供的图片,移动型凸轮机构是指凸轮与接触面之间的相对运动为移动。从图中可以看出,选项C的图形表示一个凸轮的接触面与另一部件之间有明显的移动接触,符合移动型凸轮机构的特点。因此,正确答案是C。
二、多选题
31、如图,下列哪两个选项是棘轮机构?( ) 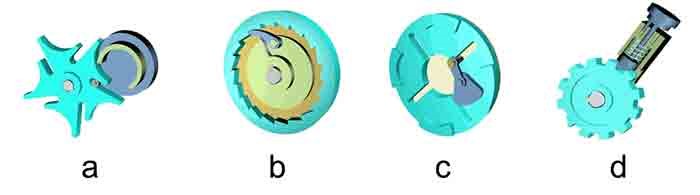
A、a
B、b
C、c
D、d
解析:
根据提供的图片,可以看出机构a和d是棘轮机构。棘轮机构是一种常用的机械传动装置,其主要特点是在主动轮和被动轮之间传递运动,同时实现单向锁定,常用于单向驱动或定位装置。因此,正确答案是B和D。
32、如图,小汽车在坡上停留的过程中,受到的力包括哪三项?( ) 
A、弹力
B、摩擦力
C、重力
D、支持力
解析:
小汽车在坡上停留的过程中,它受到三个力的作用。首先,由于汽车与地面接触,所以会受到地面的支持力,即选项D的支持力。其次,汽车受到重力作用,即选项C的重力。此外,由于汽车停在坡上,它还会受到坡面的摩擦力以防止滑下,即选项B的摩擦力。然而,题目要求选择三项,但题目中的图片并没有显示出汽车受到弹力的作用,所以选项A的弹力并不是正确答案。因此,正确的选项是B、C、D。
33、以下物品含有齿轮的两项是?( )
A、机械钟表
B、小汽车
C、风筝
D、笔记本
解析:
机械钟表内部通常包含齿轮,用于驱动时针和分针的运动。小汽车中同样有齿轮,它们用于驱动车辆的各种运动,如行驶、转向等。而风筝和笔记本不包含齿轮。因此,包含齿轮的两项是机械钟表和小汽车。
34、如图,下列设计为了增大摩擦力的有哪些?( ) 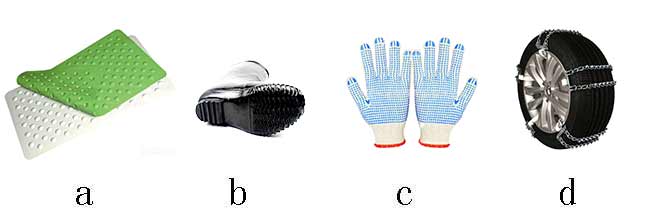
A、a
B、b
C、c
D、d
解析:
根据题目给出的图片,我们可以分析每个选项中的设计是为了增大摩擦力还是减小摩擦力。对于选项A、B、C和D,它们的设计都有增加摩擦力的效果。选项A可能是使用了粗糙的表面来增大摩擦力;选项B可能是通过增加接触面的压力来增大摩擦力;选项C可能是使用了防滑设计来增大摩擦力。选项D的设计是为了增加雪路地面摩擦力。因此,为了增大摩擦力的设计有A、B、C和D。
35、关于摩擦力说法正确的两项是?( )
A、滑动摩擦力的大小与接触面的粗糙程度有关
B、滑动摩擦力的大小与接触面的粗糙程度无关
C、两个物体不接触也能产生摩擦力
D、产生摩擦力的两个物体一定是相互接触的
解析:
关于摩擦力的说法,滑动摩擦力的大小与接触面的粗糙程度有关,因此选项A正确。选项B中,滑动摩擦力的大小与接触面的粗糙程度无关的说法是错误的。摩擦力产生的条件是物体间要有相互挤压和接触面粗糙且有相对运动或相对运动趋势,因此两个物体不接触不可能产生摩擦力,选项C错误。产生摩擦力的两个物体一定是相互接触的,因此选项D正确。
三、判断题
36、自行车采用了链传动。( )
A 正确
B 错误
解析:
自行车通过链条将脚踏的动力传递到后轮,使自行车前进。这是自行车链传动的典型应用。因此,本题说法正确。
37、能量之间可以相互转化。( )
A 正确
B 错误
解析:
能量之间确实可以相互转化。在物理学中,能量守恒定律是一个基本定律,它表明能量在转化和转移过程中总量保持不变。这意味着一种形式的能量可以转化为另一种形式的能量。例如,电能可以转化为热能、光能、动能等。因此,该题说法正确。
38、 恐怖谷理论指的是机器人天生害怕人类。( )
A 正确
B 错误
解析:
恐怖谷理论并不指机器人天生害怕人类。恐怖谷理论是一个关于人类对类似人类物体(如机器人、玩偶等)的感知和反应的心理学理论,它解释了为什么某些情况下人们会对这些物体产生强烈的恐惧或厌恶反应。因此,该题目中的说法是错误的。
39、任何机械都不省功。( )
A 正确
B 错误
解析:
根据物理学中的功的原理,任何机械都不省功。也就是说,使用机械时,无论机械的结构和工作原理如何,都不能使功的输入小于功的输出。因此,该说法是正确的。
40、链传动中链轮的转向可以相同也可以相反。( )
A 正确
B 错误
解析:
链传动中两链轮的转向不可以相同。在链传动中,两链轮的转向是相反的。这是因为链传动的工作原理决定了链轮的转向必须相反,以确保链条能够正确地传递动力。如果两链轮的转向相同,链条将无法在两个链轮之间正常工作,从而导致传动失效。因此,链传动中两链轮的转向相反是一个基本且必要的条件,以确保链条能够顺畅地绕过链轮,实现动力的有效传递。
41、齿轮传动更适合近距离传动。( )
A 正确
B 错误
解析:
齿轮传动更适合近距离传动。这是因为齿轮传动的主要优点包括结构紧凑、传动准确、效率高和工作可靠,这些特点使其非常适合近距离的传动应用。
42、皮带传动容易出现打滑现象。( )
A 正确
B 错误
解析:
皮带传动时,由于皮带与带轮之间的摩擦系数有限,当传动负载过大或者皮带张力不足时,皮带与带轮之间的摩擦力可能不足以维持正常的传动,导致皮带在带轮上出现滑动,即打滑现象。因此,皮带传动容易出现打滑现象的说法是正确的。
43、所有的机器人都有机械手臂。( )
A 正确
B 错误
解析:
并非所有的机器人都有机械手臂。机器人是一种能够执行某些任务的机器,其设计和功能因应用场景而异。有些机器人可能没有机械手臂,而是采用其他结构或装置来完成任务。因此,说所有的机器人都有机械手臂是不准确的。
44、两个物体接触面越光滑摩擦力越大。( )
A 正确
B 错误
解析:
摩擦力的大小与接触面的光滑程度有关,但并非接触面越光滑摩擦力就越大。实际上,当两个物体接触面非常光滑时,摩擦力会很小,甚至接近于零。因此,该说法是错误的。
45、想要实现机械自转的同时绕一个旋转中心公转,可以采用“行星齿轮”。( )
A 正确
B 错误
解析:
行星齿轮是一种能够实现旋转运动的机械装置,它可以在自转的同时绕一个旋转中心进行公转。因此,该题目的陈述是正确的。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




