



一、单选题
1、《墨子·鲁问》中记载了“公输子削木为鹊”的典故,该典故记载的是?( )
A、空中机器人
B、军用机器人
C、水下机器人
D、医用机器人
解析:
《墨子·鲁问》中记载了"公输子削木为鹊"的典故,其中的"削木为鹊"意味着制作能飞翔的木制物品,即空中机器人。因此,该典故记载的是空中机器人,答案为A。
2、智能机器人属于第几代机器人?( )
A、第一代
B、第二代
C、第三代
D、第四代
解析:
智能机器人属于第三代机器人。第一代机器人是简单的自动化机械,第二代机器人具备感知能力,而第三代机器人除了感知能力外,还具备思考、决策等智能能力,能够完成更加复杂的任务。因此,智能机器人属于第三代机器人。
3、下列属于机器人三定律的选项是?( )
A、机器人外形必须为人形
B、机器人必须是金属材质制成
C、机器人不能伤害人类
D、机器人只能应用于工业生产
解析:
机器人三定律是由科幻小说作家艾萨克·阿西莫夫提出的伦理原则,包括:
- 机器人不得伤害人类,也不得因不采取行动而让人类受到伤害。
- 机器人必须服从人类的命令,但前提是这些命令不与第一定律相冲突。
- 机器人必须保护自身的存在,但前提是这不与第一、第二定律相冲突。
其中只有选项C是机器人三定律中的一部分,即机器人不得伤害人类。因此,正确答案是C。选项A、B和D都不是机器人三定律的内容。
4、人体能承受的最大安全电压为?( )
A、1.5V
B、36V
C、1000v
D、220V
解析:
人体能承受的最大安全电压为36V。
5、如图,车辆停在斜坡上,车辆受到的力不包括?( )

A、重力
B、静摩擦力
C、滑动摩擦力
D、支持力
解析:
车辆停在斜坡上时,车辆受到重力、静摩擦力(以保持车辆静止)和斜坡的支持力。而滑动摩擦力是在车辆运动时才会产生的力,因此车辆停在斜坡上时不会受到滑动摩擦力。所以正确答案是C。
6、以下未产生摩擦力的场景是?( )
A、物体静止在斜面上
B、车辆在高速路上行驶
C、拔河比赛
D、一个物体静止放在水平地面上
解析:
摩擦力产生的条件是接触面不光滑且有相对运动或相对运动趋势。
A选项中,物体静止在斜面上,可能与斜面之间存在静摩擦力,防止物体下滑。
B选项中,车辆在高速路上行驶,轮胎与地面之间存在摩擦力,提供必要的行驶阻力。
C选项中,拔河比赛中,两队之间通过摩擦力来争夺胜负。
而D选项中,一个物体静止放在水平地面上,如果没有其他外力作用,物体与地面之间不会产生相对运动或相对运动趋势,因此不会产生摩擦力。所以答案是D。
7、直升机尾桨的主要作用是?( )
A、美观
B、产生凉风
C、抵消旋翼转动时引起的直升机本身的自转
D、没有作用
解析:
直升机尾桨的主要作用是抵消旋翼转动时引起的直升机本身的自转,从而保证直升机的稳定飞行。因此,选项C是正确的。而选项A、B、D都与直升机尾桨的实际作用不符。
8、机器小车采用了差速运动控制方向,以下能让小车左转的是?( )
A、左侧轮加速,右侧轮减速
B、左侧轮减速,右侧轮加速
C、左右两侧轮同时加速
D、左右两侧轮同时减速
解析:
差速运动控制方向的核心原理是通过两侧轮子不同的转速来实现小车的转向。当左侧轮子减速,右侧轮子加速时,由于左侧轮子转速慢,右侧轮子转速快,小车会向左倾斜,从而实现左转。因此,正确答案是B。
9、关于电动机工作时的能量转化说法正确的是?( )
A、动能转化为势能
B、机械能转化为电能
C、热能转化为电能
D、电能转化为机械能
解析:
电动机工作时,主要是将电能转化为机械能。在电动机的运转过程中,电流通过电动机的线圈时,线圈会受到力的作用而转动,从而把电能转化为机械能。因此,选项D正确。其他选项中,A、B、C都与电动机的能量转化过程不符。
10、如图,小朋友在玩滑梯,下列说法正确的是?( )

A、下滑过程中小朋友受到的重力变大
B、下滑过程中小朋友不受重力作用
C、下滑过程中小朋友受到的重力方向不能确定
D、下滑过程中小朋友与滑梯产生了摩擦力
解析:
小朋友下滑过程中,受到的重力是恒定的,不会因运动状态改变而发生变化,所以选项A和B都是错误的。重力方向始终是竖直向下的,所以选项C也是错误的。小朋友在滑梯上滑动时,与滑梯之间存在摩擦力的作用,因此选项D是正确的。
11、挖掘机的机械臂主要采用了以下哪种机构?( )
A、滑轮组
B、齿轮组
C、连杆机构
D、棘轮机构
解析:
挖掘机的机械臂主要采用的是连杆机构。这种机构通过一系列的连杆和连接点,将运动源(如发动机或液压马达)的旋转或直线运动转化为机械臂的复杂动作,从而实现挖掘、提升、旋转等多种功能。因此,选项C是正确答案。而滑轮组主要用于改变力的方向或增加运动距离;齿轮组用于传递转动和扭矩;棘轮机构主要用于单向锁定或单向转换运动,它们并不是挖掘机的机械臂主要采用的机构。
12、关于齿轮组说法正确的是?( )
A、大齿轮带动小齿轮起加速作用
B、只存在平行啮合一种啮合方式
C、齿轮组无法计算传动比
D、齿轮组内的各个齿轮必须在同一平面内安装
解析:
关于齿轮组的说法,大齿轮带动小齿轮确实起到加速作用,因此选项A正确。齿轮啮合方式不仅限于平行啮合,还有其他方式,如斜啮合等,所以选项B错误。齿轮组的传动比是可以计算的,因此选项C错误。齿轮组内的各个齿轮不一定必须在同一平面内安装,也可以安装在空间交错的位置上,因此选项D错误。
13、曲柄摇杆机构中摇杆做什么动作?( )
A、做回转运动
B、无规律动作
C、在既定的轨道上滑动
D、往复摇摆
解析:
曲柄摇杆机构中,摇杆做往复摇摆动作。曲柄旋转一周,摇杆往复摆动两次,因此在曲柄摇杆机构中,摇杆的动作是往复摇摆。因此,正确答案为D。
14、如图,这是凸轮机构的几种从动件,属于摆动型从动件的是?( )
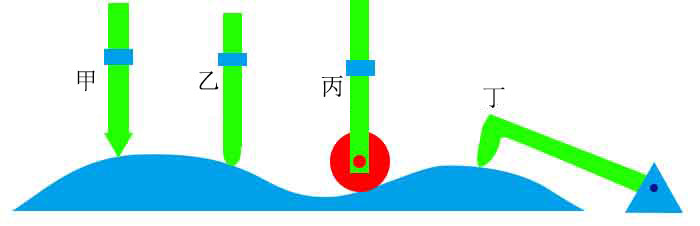
A、甲
B、乙
C、丙
D、丁
解析:
根据图像显示,甲、乙、丙的从动件均呈现连续的运动轨迹,而丁的从动件在某一角度范围内呈现摆动的特性,因此属于摆动型从动件的是丁。
15、如图,该机构是?( )
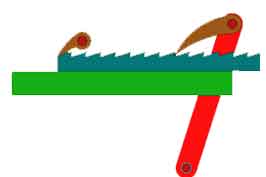
A、曲柄摇杆机构
B、曲柄滑块机构
C、齿式棘轮机构
D、摩擦式棘轮机构
解析:
根据提供的图片,该机构是一个齿式棘轮机构。这种机构通过齿轮和棘轮的相互作用来实现特定的运动功能。因此,正确答案是C。
16、下列机构哪个是不完全齿轮啮合?( )
A、
B、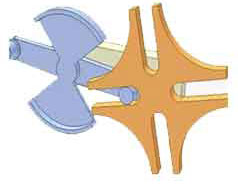
C、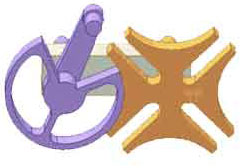
D、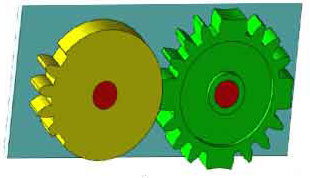
解析:
根据题目中的图片信息,选项D中的齿轮显示出了不连续的齿形,这是不完全齿轮啮合的典型特征。因此,正确答案是D。
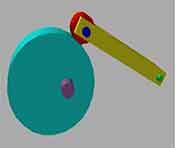
17、如图,关于该凸轮机构说法错误的是?( )
A、采用了滚子从动件
B、采用了盘形凸轮
C、由凸轮、基座、从动件三个部分组成
D、采用了直动型从动件
解析:
根据提供的图片和信息,该凸轮机构采用了盘形凸轮和滚动接触形式的从动件。选项A正确,确实采用了从动件;选项B也正确,确实是盘形凸轮。选项C描述了凸轮机构的基本组成部分,也是正确的。而选项D,从图片中无法看出该凸轮机构采用的是直动型从动件,因此D选项是错误的。
18、凸轮的运动轨迹与下列哪个因素有关?( )
A、凸轮的材质
B、凸轮的颜色
C、凸轮的轮廓曲线
D、从动件的材质
解析:
凸轮的运动轨迹与凸轮的轮廓曲线有关。轮廓曲线决定了凸轮与从动件之间的接触点和运动关系,从而决定了凸轮的转动方式和运动轨迹。而凸轮的材质、颜色和从动件的材质对凸轮的运动轨迹没有直接影响。因此,选项C是正确的。
19、关于反向双曲柄机构说法正确的是?( )
A、该机构有两个杆子做反方向回转运动
B、该机构中有部件做往复摇摆运动
C、该机构中有部件在既定的轨道上来回滑动
D、该机构包括滑块
解析:
反向双曲柄机构是一种机械结构,其主要特点是两个杆子做反方向回转运动。因此,关于反向双曲柄机构说法正确的是A选项。其他选项中,B项描述的是某些机构中部件的往复摇摆运动,C项描述的是部件在既定轨道上的来回滑动,D项提到的滑块并不是反向双曲柄机构的必要组成部分。
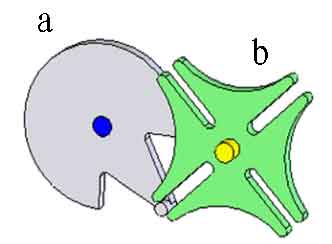
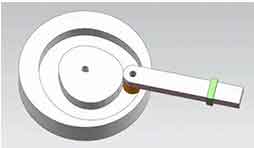
20、如图,关于该机构说法正确的是?( )
A、a是从动件,b是主动件
B、这是棘轮机构
C、这是间歇运动机构
D、这是凸轮机构
解析:
根据提供的图片,该机构是一种间歇运动机构,其中a和b都是主动件,它们交替地接触并推动输出件,使得输出件产生间歇运动。因此,选项C正确,而其他选项A、B、D都没有准确描述该机构的特点。
21、下列哪个是曲柄滑块机构?( )
A、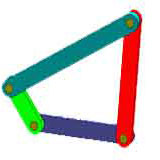
B、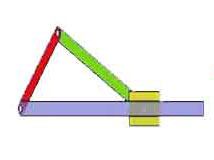
C、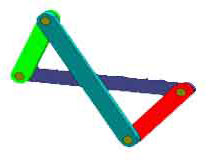
D、
解析:
曲柄滑块机构是一种由曲柄、滑块和连杆等组成的机构,用于实现往复运动或摆动运动的转换。选项B中的图形符合曲柄滑块机构的特征,因此是正确答案。
22、如图,关于该机构的说法正确的是?( )

A、这是齿式棘轮机构
B、这是摩擦式棘轮机构
C、这是凸轮机构
D、这是滑轮组
解析:
根据提供的图片,该机构具有棘轮的特性,用于实现单向运动,通过摩擦传递动力。因此,正确答案是B,即这是摩擦式棘轮机构。
23、典型棘轮机构不包括下列哪个部件?( )
A、棘轮
B、棘爪
C、主动摆杆
D、凸轮
解析:
典型棘轮机构主要包括棘轮、棘爪和主动摆杆三个部件。因此,不包括的部件是凸轮,答案为D。
24、如图,关于该机构说法正确的是?( )
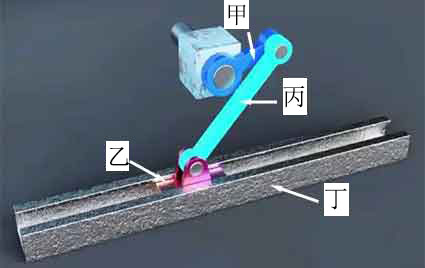
A、这是曲柄摇杆机构
B、甲部件往复摆动
C、乙部件在既定轨道上滑动
D、丙部件做回转运动
解析:
根据提供的图片,该机构中乙部件确实是在既定轨道上滑动的。因此,选项C是正确的。其他选项没有提到乙部件在轨道上的滑动,所以不是正确答案。
25、滑杆机构中回转体做什么动作?( )
A、来回摇摆
B、回转动作
C、固定不动
D、在既定的轨道上滑动
解析:
滑杆机构中的回转体主要进行回转动作,即围绕一个固定点做圆周运动或类似运动。因此,正确答案是B。
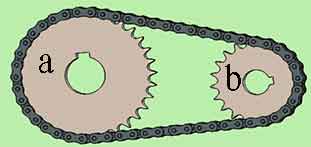
26、如图,关于该图片说法正确的是?( )

A、这是皮带传动
B、这是链传动
C、这是齿轮平行啮合
D、a和b轮的转向相同
解析:
根据提供的图片信息,图片展示的是两个齿轮之间的传动方式,且两齿轮之间呈现平行啮合的状态。因此,正确答案是C,即这是齿轮平行啮合。A、B选项描述的是传动方式,但与图片内容不符;D选项关于a和b轮的转向是否相同,无法从图片中直接判断,因此也不作为正确答案。
27、下列哪个选项不是间歇运动机构?( )
A、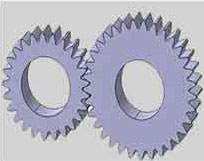
B、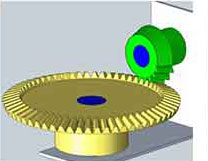
C、
D、
解析:
根据提供的图片,选项A所示机构在运动中会有停歇,属于间歇运动机构。而间歇运动机构是指某些运动部件只能在一段行程内作单向运动(或运动一段距离),并在该行程结束时暂时停歇,然后再向相反方向运动或回到原位。因此,选项A是间歇运动机构,而不是题目所要求的非间歇运动机构。选项B、C和D可能表示不同类型的机构,但根据题目描述和提供的图片信息,无法准确判断它们是否为间歇运动机构或非间歇运动机构。因此,正确答案是A。
28、如图,该机构主动件与从动件的锁合方式为?( )
A、重力锁合
B、弹力锁合
C、几何锁合
D、材料锁合
解析:
根据提供的图像,该机构主动件与从动件的锁合方式是通过几何形状的配合来实现锁合的,因此答案为C,即几何锁合。
29、如图,关于该传动装置说法正确的是?( )
A、这是皮带平行传动装置
B、这是皮带交叉传动装置
C、这是齿轮传动装置
D、a轮与b轮转动方向相同
解析:
根据提供的图片,该传动装置中a轮与b轮通过皮带相连。由于皮带传动是摩擦传动,两轮转动方向是相同的。因此,选项D正确,即a轮与b轮转动方向相同。其他选项如A、B、C都与图片中的传动装置不符。
30、下列哪个是皮带传动?( )
A、
B、
C、
D、
解析:
题目询问的是哪个是皮带传动,从提供的图片中可以看出,C选项展示了一个明显的皮带传动机构,因此答案为C。
二、多选题
31、关于静摩擦力的产生条件说法正确的2项是?( )
A、两个物体必须相互接触
B、两个物体不接触
C、两个物体有相对运动
D、两个物体有相对运动趋势,但未发生相对运动
解析:
静摩擦力的产生条件包括两个物体相互接触、接触面不光滑、有弹性形变以及存在相对运动趋势但未发生相对运动。因此,选项A和D是正确的,而选项B和C是错误的。静摩擦力是阻碍物体相对运动趋势的力,而不是由相对运动产生的。
32、关于伯努利定理说法正确的2项是?( )
A、物理表面的流体速度越快,物体表面所受的压强越小
B、物理表面的流体速度越快,物体表面所受的压强越大
C、飞机起飞时机翼上侧的气流速度比下侧要快
D、飞机起飞时机翼上侧的气流速度比下侧要慢
解析:
关于伯努利定理,其描述的是在一个流场中,流速越大的地方压强越小。因此,选项A正确,即物理表面的流体速度越快,物体表面所受的压强越小。同时,对于飞机起飞时的机翼设计,为了利用伯努利定理产生升力,机翼上侧的气流速度会比下侧快,以产生更高的压强差,从而提供升力。因此,选项C也是正确的。而选项B和D与伯努利定理的描述相悖,所以排除。
33、下列哪2项是单动式棘轮机构?( )
A、
B、
C、
D、
解析:
根据题目所给的图片,单动式棘轮机构的特征在于其只有一个棘轮做单向转动,用于单向超越离合的场合。从给定的选项中,选项A和C的图片显示了一个棘轮做单向转动,符合单动式棘轮机构的特点。而选项B和D的结构不符合单动式棘轮机构的特点。因此,正确答案是A和C。
34、如图,关于该自行车说法正确的2项是?( )

A、采用了皮带传动
B、采用了链传动
C、使用了三角形结构增加稳定性
D、使用了四边形结构增加稳定性
解析:
从题目给出的图片来看,该自行车采用的是链条传动方式,因此选项B正确。另外,从自行车的结构来看,它使用了三角形结构来增加稳定性,因此选项C也是正确的。而选项A关于皮带传动的描述与图片不符,选项D关于四边形结构增加稳定性的描述也没有在图中体现,因此选项A和D都是错误的。
35、以下传动方式主动轮和从动轮转向相同的2项是?( )
A、齿轮平行啮合
B、皮带平行传动
C、皮带交叉传动
D、链传动
解析:
在齿轮平行啮合和皮带平行传动中,主动轮和从动轮的转向是相同的。而在皮带交叉传动中,主动轮和从动轮的转向通常是相反的。链传动可以是平行传动也可以是交叉传动,取决于链条的连接方式和布局,但在平行传动的情况下,主动轮和从动轮的转向是相同的。因此,选项A(齿轮平行啮合)和选项B(皮带平行传动)的传动方式中主动轮和从动轮转向相同。
三、判断题
36、指南车的作用是计量车的行驶路程。( )
A 正确
B 错误
解析:
指南车的主要作用是确定方向,帮助人们识别正确的行进方向,而不是计量车的行驶路程。因此,题目中的说法是错误的。
37、机器人的控制器相当于人类的大脑。( )
A 正确
B 错误
解析:
机器人的控制器是机器人的核心部件之一,负责控制机器人的各种运动和操作。与人类的大脑相似,机器人的控制器负责接收、处理和解释信息,并指导机器人的行为。因此,该说法“机器人的控制器相当于人类的大脑”是正确的。
38、所有的机械都不能省功。( )
A 正确
B 错误
解析:
根据物理学中的能量守恒原理,机械在使用过程中不能产生额外的能量,也就是说不能省功。因此,所有的机械都不能省功,答案为A。
39、车轮之所以是圆形是因为滚动摩擦力要远小于滑动摩擦力。( )
A 正确
B 错误
解析:
车轮之所以是圆形是因为滚动摩擦力要远小于滑动摩擦力。圆形车轮在行驶过程中进行滚动,可以减小摩擦力,从而提高行驶效率。因此,该说法正确。
40、能量可以从一个物体转移到另一个物体或者从一种形式转化为另一种形式。( )
A 正确
B 错误
解析:
该说法是正确的。能量可以从一个物体转移到另一个物体,例如通过热传导、机械运动等;也可以从一种形式转化为另一种形式,例如将机械能转化为电能等。因此,该说法符合能量守恒定律的基本原理。
41、在齿轮组中,主动轮16个齿,从动轮8个齿,则传动比为1:2。( )
A 正确
B 错误
解析:
传动比是齿轮组中一个重要的参数,表示主动轮的转速与从动轮的转速之比。在这个例子中,主动轮有16个齿,从动轮有8个齿。根据齿轮的基本原理,传动比等于两个齿轮的齿数之比,即16:8,简化后为1:2。因此,题目的描述是正确的。
42、多个齿轮依次啮合,传动比等于第一个齿轮与最后一个齿轮直接啮合时的传动比。( )
A 正确
B 错误
解析:
传动比等于齿轮的转速之比,对于多个齿轮依次啮合的情况,传动比等于第一个齿轮与最后一个齿轮的转速之比,因此该说法正确。
43、传动链的长度不可以调节。( )
A 正确
B 错误
解析:
传动链的长度是可以调节的。通过调整链轮的位置或者更换不同长度的链条环节,可以改变传动链的长度,以适应不同的传动需求。因此,原题说法错误。
44、传动精度不高是皮带传动的缺点之一。( )
A 正确
B 错误
解析:
传动精度不高确实是皮带传动的一个缺点。由于皮带在传动过程中可能会受到张紧力、温度变化、外部环境等因素的影响,导致其传动精度不高,容易出现误差。因此,该说法是正确的。
45、皮带传动的所有装置都要求在同一平面内安装。( )
A 正确
B 错误
解析:
皮带传动装置的安装并不要求所有装置都在同一平面内。实际上,根据需要,皮带传动装置可以在不同的平面内安装,只要保证皮带的张紧和传动效率即可。因此,题目中的说法是错误的。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




