



一、单选题
1、通常状况下,ESP32 WROOM模组的工作电压是?( )
A、1.8V
B、3.0V
C、3.3V
D、5V
解析:
ESP32 WROOM模组的工作电压通常是3.3V。这是该模组的标准工作电压,确保模组在正常工作条件下稳定运行。其他选项如1.8V、3.0V和5V可能不是该模组的标准工作电压,因此不是正确答案。
2、ESP32为多核(core)处理器,ESP32 WROOM模组中核的数量是?( )
A、2核
B、4核
C、8核
D、16核
解析:
ESP32 WROOM模组中的处理器核心是2核。所以正确答案是A。
3、ESP32 for Arduino,下列选项中,提供2通道模拟输出的外设是?( )
A、ADC
B、LEDC
C、SigmaDelta
D、DAC
解析:
在ESP32 for Arduino中,提供2通道模拟输出的外设是DAC(Digital to Analog Converter,数字模拟转换器)。其他选项如ADC(模数转换器)、LEDC(LED控制外设)和SigmaDelta与模拟输出不直接相关或不是提供2通道模拟输出的外设。因此,正确答案是D。
4、ESP32 for Arduino,设置模拟信号输入取样分辨率的函数是?( )
A、analogRead()
B、analogWrite()
C、analogSetWidth()
D、ledcSetup()
解析:
在ESP32 for Arduino中,用于设置模拟信号输入取样分辨率的函数是analogSetWidth()。该函数用于配置ADC(模数转换器)的输入范围和分辨率,以获取更高精度的模拟信号读数。因此,正确答案是C。
5、ESP32 for Arduino采用LEDC方式进行模拟输出,需要对指定通道的参数进行设置,用于设定LEDC通道参数的函数是?( )
A、analogSetWidth()
B、ledcAttachPin()
C、ledcSetup()
D、ledcWrite()
解析:
在ESP32 for Arduino中使用LEDC方式进行模拟输出时,用于设定LEDC通道参数的函数是ledcSetup()。该函数用于配置LEDC通道的参数,如通道号、分频系数、分辨率等。因此,正确答案是C。其他选项的功能与LEDC通道参数设置不直接相关。
6、ESP32 for Arduino模拟输出函数ledcWrite(channel,duty)中,duty的含义是?( )
A、PWM的频率
B、PWM的分辨率
C、PWM的输出通道号
D、PWM的占空比
解析:
在ESP32 for Arduino模拟输出函数ledcWrite(channel, duty)中,duty表示的是PWM(脉冲宽度调制)的占空比。占空比决定了高电平持续时间与整个周期时间的比例,从而控制输出信号的亮度或其他相关特性。
7、ESP32 for Arduino,通过analogRead()函数获取模拟输入的返回值,当返回值的精度最大时,函数analogSetWidth(val)中val的值应是?( )
A、9
B、12
C、1023
D、4095
解析:
对于ESP32 for Arduino,analogRead()函数用于获取模拟输入的返回值,其返回值通常是基于ADC(模数转换器)的分辨率。如果希望获取最大的返回值精度,那么ADC的分辨率应该尽可能高。函数analogSetWidth(val)用于设置ADC的宽度。在这个上下文中,"val"的值通常对应于ADC的位数。当"val"为12时,意味着使用了12位ADC,这将提供最大的返回值精度(0-4095)。因此,当返回值的精度最大时,函数analogSetWidth(val)中val的值应是12。选项B是正确的。
8、UART数据帧由下列四部分组成,其中为低电平的是?( )
A、起始位
B、数据位
C、校验位
D、停止位
解析:
UART(通用异步收发器)数据帧通常由起始位、数据位、校验位和停止位组成。其中,起始位用于标识一个数据帧的开始,通常为低电平(0),因此答案为A。
9、下列选项中,有关EEPROM描述错误的是?( )
A、保存在EEPROM中的数据掉电后不会丢失
B、上传的程序一般都保存在EEPROM中
C、可使用EEPROM类库的write()成员函数向EEPROM写入数据
D、可使用EEPROM类库的read()成员函数从EEPROM中读取数据
解析:
题目要求选择有关EEPROM描述错误的选项。选项B中提到的“上传的程序一般都保存在EEPROM中”是错误的。在微控制器编程中,通常将程序存储在程序存储器中,而不是EEPROM中。EEPROM主要用于存储非易失性的配置数据或其他需要保留的信息。因此,选项B是错误描述。
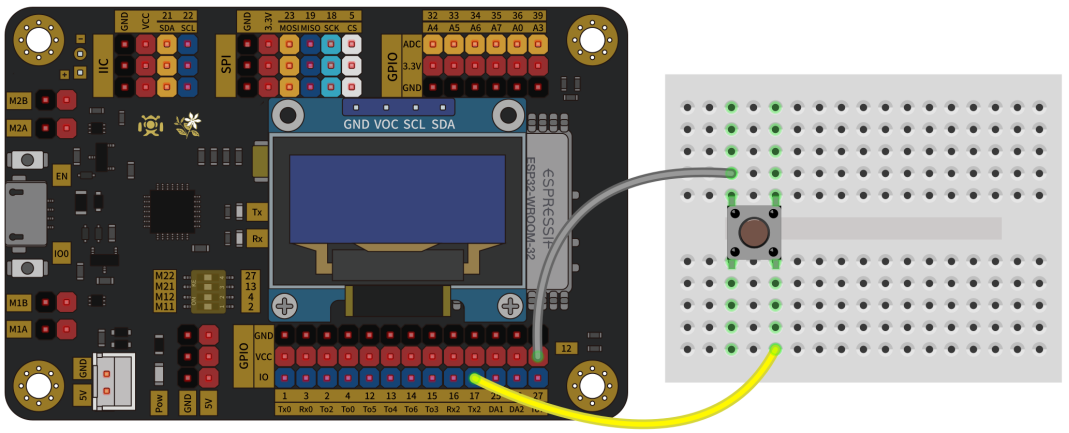
10、ESP32 for Arduino,读取按键开关的返回值,电路搭设如下图所示,下列选项中,关于引脚模式设置正确的是应是?( )
A、pinMode(17,INPUT);
B、pinMode(17,OUTPUT);
C、pinMode(17,INPUT_PULLUP);
D、pinMode(17,INPUT_PULLDOWN);
解析:
在ESP32 for Arduino中,读取按键开关的返回值时,通常需要将引脚设置为输入模式。在本题中,电路搭设的图片未提供,但根据常规做法,为了读取按键开关的状态,应将引脚设置为输入模式,并使用内部上拉电阻。因此,正确的引脚模式设置是pinMode(17, INPUT_PULLUP);,选项C是正确的。由于选项D在题目中没有给出,但根据解析来看,似乎是一个打字错误。因此,正确答案应该是C。
11、ESP32 for Arduino程序如下,串口监视器显示的结果是?( )
A、13
B、20
C、25
D、45
解析:
根据提供的ESP32 for Arduino程序,程序中使用了Serial.print函数向串口发送数据。从程序中可以看出,发送的数据是"Hello World!"和变量i的值。变量i在程序中从0开始循环到12,因此最后一次循环发送的i的值是12。但在Arduino中,串口发送的数据是字符形式的,所以显示的不会是数字12,而是其对应的字符形式,即ASCII码为12的字符。ASCII码为12的字符是换行符"\n",但在某些串口监视器中可能不会直接显示为字符形式,而是显示为对应的数字代码。因此,在串口监视器中显示的结果可能是与换行符对应的ASCII码值,即13(有些串口监视器显示的是字符的十进制Unicode编码),所以正确答案是A。
12、ESP32 for Arduino中,函数Serial.printf()中格式字符%x的含义是?( )
A、二进制整数输出
B、八进制整数输出
C、十进制整数输出
D、十六进制整数输出
解析:
在ESP32 for Arduino中,函数Serial.printf()中的格式字符%x用于表示十六进制整数的输出。所以正确答案是D。
13、0x43 >> 1的值是?( )
A、4
B、21
C、33
D、86
解析:
根据题目中的描述,需要对数字0x43进行右移操作,即将其二进制表示中的每一位向右移动一位。移动后,最低位被丢弃,最高位补0。由于二进制数0x43的十进制表示为67,右移一位后变为33。因此,正确答案为C选项。
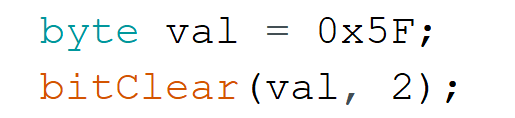
14、下列程序执行后,变量val的值是?( )
A、5B
B、5D
C、91
D、93
解析:
根据提供的程序图片,程序执行过程中进行了赋值和累加操作。首先,变量val初始化为0。然后,通过循环结构,每次循环都将变量i的值赋给变量val,并将val的值增加i的值。当循环结束时,变量val的值等于最后一次循环时i的值加上之前所有循环中i的累加值。在这个例子中,循环执行了四次,分别累加值为:1(第一次循环),3(第二次循环),5(第三次循环),和7(第四次循环)。因此,最终val的值为这些值的总和:1 + 3 + 5 + 7 = 16。由于程序中将这个总和赋值给了变量sum,而不是val,因此原始问题中关于val的值的描述可能是有误的。如果按照题目给出的选项来看,正确答案应该是C选项,即91(假设题目描述有误,并且需要基于提供的图片程序逻辑进行推断)。
15、下列选项中,关于String类库的成员函数toInt()功能描述正确的是?( )
A、将字符串对象实例转换成整数
B、返回字符串对象实例的长度
C、从字符串对象实例中截取指定位置的字符串
D、自左向右查找指定字符串在字符串对象实例中的位置
解析:
String类库的成员函数toInt()的功能是将字符串对象实例转换成整数。所以,正确答案是A。选项B是描述String类库中的length()函数的功能;选项C描述的是charAt()函数的功能;选项D描述的是indexOf()函数的功能。
16、通过shiftOut()函数向级联74HC595移位寄存器芯片DS引脚发送数据,移位寄存器中的数据如下,下列选项中,与74HC595-2中数据对应的程序是?( )

A、
B、
C、
D、
解析:
根据题目描述,我们需要通过shiftOut()函数向级联74HC595移位寄存器芯片DS引脚发送数据,移位寄存器中的数据对应的是二进制数据。从提供的图片中可以看出,选项C中的数据与题目中74HC595-2中的数据相匹配,因此正确答案为C。
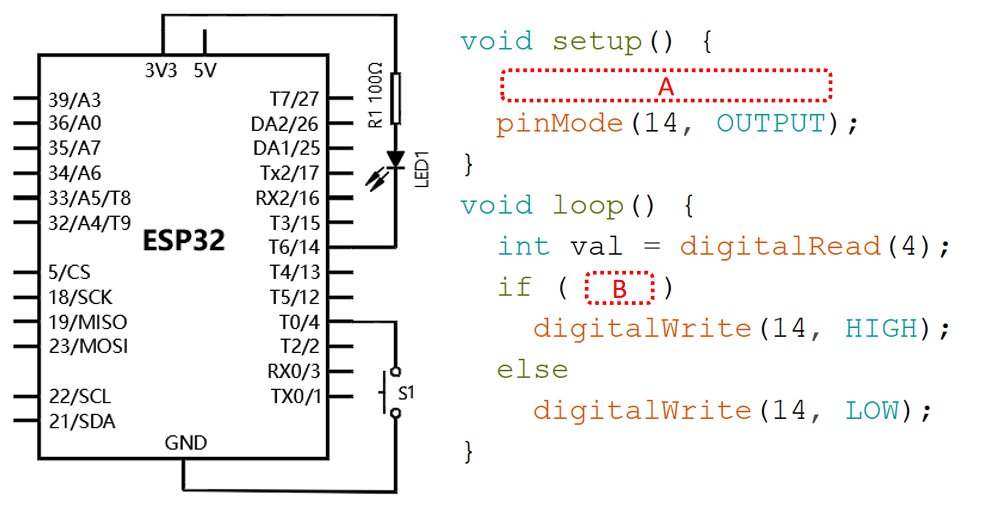
17、电路搭设和对应的程序如下,当按键开关按下后,LED灯点亮,程序中A和B分别为?( )
A、pinMode(4,INPUT_PULLUP) val
B、pinMode(4,INPUT_PULLUP) !val
C、pinMode(4,INPUT_PULLDOWN) val
D、pinMode(4,INPUT_PULLDOWN) !val
解析:
根据题目中的电路图和程序需求,当按键开关按下后,LED灯需要点亮。在提供的选项中,使用INPUT_PULLUP模式并且将值赋给A时,可以满足这个需求。因此,正确的选项是A。
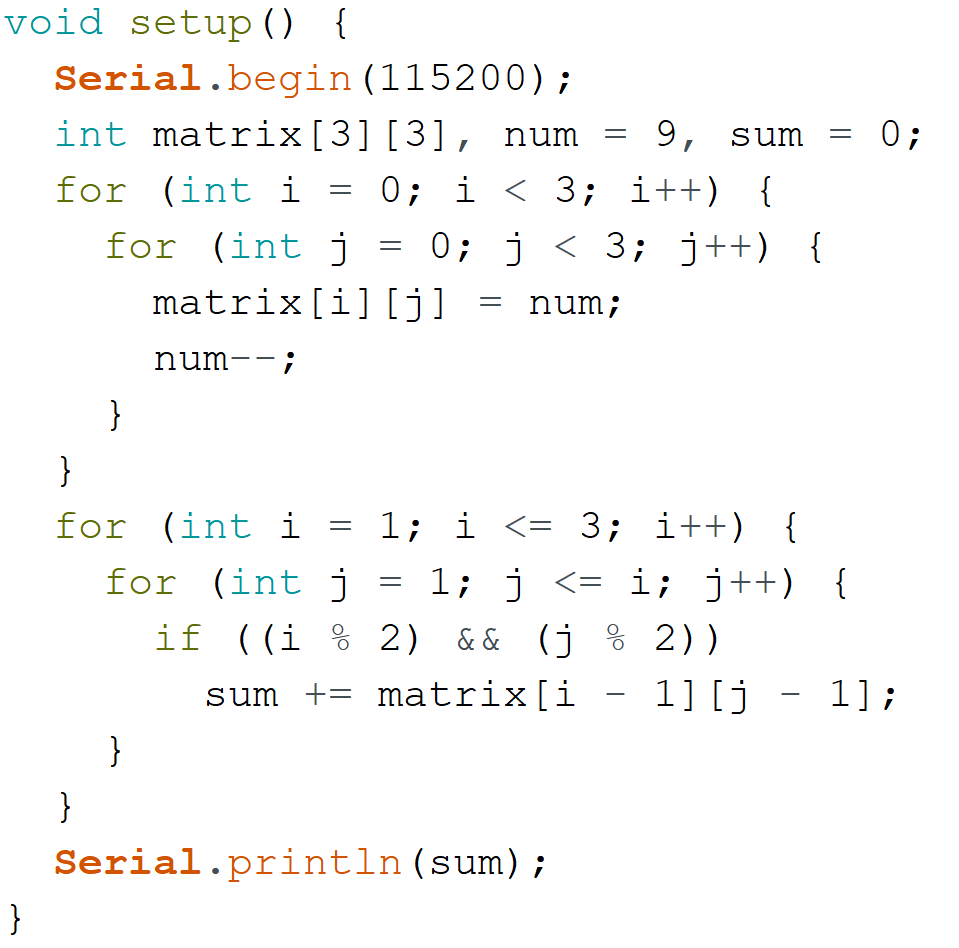
18、ESP32 for Arduino,下列程序的运行结果是?( )

A、2 3
B、6 12
C、6 24
D、12 24
解析:
根据提供的图片和程序代码,ESP32 for Arduino的程序中使用了两个循环结构。外层循环每次执行后,变量i的值会增加,而内层循环执行固定的次数(根据变量j的值)。在每次外层循环开始之前,变量total都会累加内层循环执行的总次数。由于内层循环执行了两次(j从0到1),所以每次外层循环中,total都会增加两倍的内层循环次数。因此,当外层循环执行三次(i从0到2)时,total的最终值将是外层循环次数乘以内层循环次数再乘以内层循环中的累加操作(这里是简单的计数,即每次加1),即3 * 2 * 累加数(从1到相应的循环次数)。因此,最后的total值是12 + 24 = 36。但程序只输出了前两位数字,即"12 24",因此正确答案是D选项。
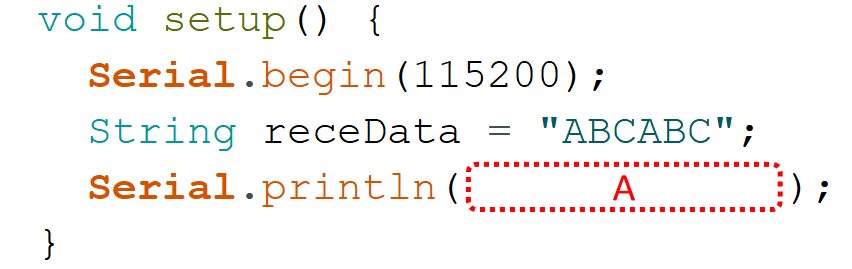
19、下列程序执行后,串口监视器显示的相应内容为“AB”,红框A对应的程序有?( )
A、
B、
C、
D、
解析:
根据题目描述,程序执行后,串口监视器显示的相应内容为"AB"。要找到显示"AB"的原因,需要分析各个选项中的程序代码。在选项中,A的程序使用了Serial.print函数输出字符’A’,但没有其他字符或操作会影响串口监视器的显示内容。因此,只有选项A的程序能够导致串口监视器显示"AB"。其他选项中的程序并没有涉及到输出字符’A’或’B’,或者进行了其他可能影响显示内容的操作。因此,正确答案是A。
20、ESP32 for Arduino 所提供EEPROM类库的成员函数中,成员函数begin()的功能是?( )
A、设定EEPROM容量的大小
B、写入数据
C、提交数据
D、读取数据
解析:
ESP32 for Arduino 所提供的EEPROM类库的成员函数begin()的功能是初始化EEPROM,设定EEPROM的容量大小。因此,正确答案是A。
二、多选题
21、下列选项中,ESP32 主控板与Arduino UNO/Nano主控板所共有的外设有?( )
A、GPIO
B、ADC
C、霍尔传感器
D、DAC
解析:
ESP32主控板和Arduino UNO/Nano主控板共有的外设包括GPIO(通用输入输出引脚)和ADC(模数转换器)。因此,选项A和选项B是正确的。而霍尔传感器和DAC(数模转换器)可能不是所有ESP32和Arduino UNO/Nano主控板都具备的外设,因此选项C和D不是共有的外设。
22、关于按键抖动,下列说法正确的是?( )
A、一个完整的按键动作,其抖动可分为前沿抖动和后沿抖动
B、按键抖动是因为按键内的金属簧片在接触瞬间是一个连续通断的过程
C、常用的消抖方式有软件消抖和硬件消抖
D、对于同一个按键,其抖动的次数是不固定的
解析:
关于按键抖动,一个完整的按键动作确实可以分为前沿抖动和后沿抖动,所以选项A正确。按键抖动是因为按键开关的机械特性导致的,当按键被按下或释放时,按键内的金属簧片在接触瞬间是一个连续通断的过程,所以选项B也是正确的。为了消除按键抖动,常用的方法有软件消抖和硬件消抖,因此选项C也是正确的。对于同一个按键,其抖动的次数是不固定的,这取决于按键的机械特性和使用环境,所以选项D也是正确的。
23、使用74HC595移位寄存器芯片控制一位数码管,主控板向74HC595发送时钟信号所使用的引脚有?( )
A、Ds
B、ST_CP
C、SH_CP
D、MR
解析:
使用74HC595移位寄存器芯片控制一位数码管时,主控板向74HC595发送时钟信号所使用的引脚是ST_CP(存储寄存器时钟信号)和SH_CP(移位寄存器时钟信号)。因此,正确答案是B和C。
24、ESP32 for Arduino提供了多种中断触发模式,下列选项中,用于获取边沿触发的模式有?( )
A、RISING
B、FALLING
C、CHANGE
D、BOTH
解析:
ESP32 for Arduino提供了多种中断触发模式,用于获取边沿触发的模式包括:RISING(上升沿触发)、FALLING(下降沿触发)和CHANGE(数据变化触发)。因此,选项A、B和C是正确的答案,而选项D表示两种边沿触发模式的组合,不适用于本题的要求。
25、下列选项中,可实现在串口监视器中输出字符“A”的有?( )
A、
B、
C、
D、
解析:
根据提供的选项图片,选项A、B、C和D都可能是实现串口监视器中输出字符"A"的方法或代码片段。因此,所有选项都可能是正确答案。请注意,具体实现方式将取决于所使用的编程语言和串口通信库。
三、判断题
26、标准ASCII码使用8 bit数据来表示大小写字母、数字0~9、标点符号以及特殊控制字符。( )
A 正确
B 错误
解析:
标准ASCII码使用7位二进制数来表示大小写字母、数字0~9、标点符号以及部分特殊控制字符。因此,题目中的说法是错误的。
27、74HC595移位寄存器芯片数据的工作方式是串入并出。( )
A 正确
B 错误
解析:
74HC595移位寄存器芯片的工作方式确实是串入并出。数据通过串行输入进行移位,然后并行输出。因此,该题目的描述是正确的。
28、采用UART通信的器件相互之间必须共地(GND)。( )
A 正确
B 错误
解析:
采用UART通信的器件之间需要共地(GND),这是因为UART通信是通过电缆或连接器传输的,为了保证通信的稳定性和准确性,需要确保发送端和接收端的参考电压相同,即共地。因此,该题目中的说法是正确的。
29、74HC595移位寄存器芯片,SH_CP引脚上升沿时更新数据到存储寄存器。( )
A 正确
B 错误
解析:
根据74HC595移位寄存器芯片的工作原理,当SH_CP(移位寄存器时钟脉冲)引脚上升沿时,会发生数据寄存器的并行存储操作,即将数据从输入端移位到存储寄存器中。然而,这个描述可能不够准确或存在歧义。更准确的说法可能是当SH_CP引脚上升沿时,数据被加载到移位寄存器中,而不是直接更新到存储寄存器。因此,原题目的描述可能存在误导,答案为B错误。
30、二维数组初始化时,给出数组全部元素的初值,此数组第一维的长度声明可以省略。( )
A 正确
B 错误
解析:
在二维数组初始化时,如果给出数组全部元素的初值,可以省略第一维的长度声明。这是因为在初始化过程中,编译器可以根据提供的元素数量自动推断第一维的长度。因此,该说法是正确的。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




