



一、单选题
1、TCP/IP四层模型中,IP协议对应的是?( )
A、应用层
B、传输层
C、网络层
D、网络接口层
解析:
TCP/IP四层模型中,IP协议对应的是网络层。IP协议是Internet Protocol(网际协议)的缩写,用于在计算机网络之间传输数据。在网络层中,IP协议负责将数据从源地址传输到目标地址,实现网络之间的通信。因此,正确答案是C。
2、浏览网页时,应用层使用的协议是?( )
A、HTTP协议
B、TCP协议
C、HTML协议
D、IP协议
解析:
浏览网页时,应用层使用的协议是HTTP协议。TCP协议和IP协议是网络层使用的协议,HTML并不是一种协议,而是一种用于创建网页的标准标记语言。因此,选项A是正确的。
3、IPV4地址的表示格式为X.X.X.X,其中X的范围是?( )
A、0~255
B、0~1023
C、0~192
D、0~168
解析:
在IPV4地址的表示格式中,每个X的范围是0到255,这是IPV4地址的标准规定。因此,答案为A。
4、一台拥有IP地址的主机,通过“IP地址+端口号”来提供多种服务,终端仿真协议(Telnet)所对应的端口是?( )
A、21
B、22
C、23
D、80
解析:
终端仿真协议(Telnet)通常使用的端口号是23。因此,正确答案是C。其他选项如A、B、D分别对应FTP、SSH和HTTP服务,与Telnet协议不对应。
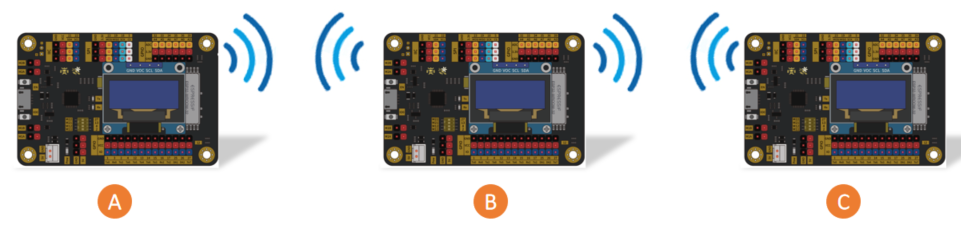
5、如下图所示,ESP32主控板A和C通过WIFI连接到主控板B,主控板A的工作模式是?( )
A、Client
B、STA
C、AP
D、Server
解析:
根据题目描述,ESP32主控板A和C通过WIFI连接到主控板B,这意味着ESP32主控板A和C是作为客户端(Client)连接到主控板B的服务器(Server)上的。因此,主控板A的工作模式是STA(Station,即客户端模式)。所以正确答案是B。
6、I2C串行通信,当总线空闲时,串行时钟线SCL的电平状态是?( )
A、低电平
B、高电平
C、上升沿
D、下降沿
解析:
在I2C串行通信中,当总线空闲时,串行时钟线SCL的电平状态为高电平。因此,正确答案是B。
7、I2C串行通信有两根数据线,分别是?( )
A、SDA SCK
B、TX RX
C、MOSI MISO
D、SDA SCL
解析:
I2C串行通信确实有两根数据线,分别是SDA(Serial Data Line,串行数据线)和SCL(Serial Clock Line,串行时钟线)。因此,正确答案是D。
8、ESP32 for Arduino I2C类库的下列成员函数中,用于主设备向从设备发送读取数据请求的成员函数是?( ) A.Wire.begin() B.Wire.transfer() C.Wire.endTransmission() D.Wire.requestFrom()
A、Wire.begin()
B、Wire.transfer()
C、Wire.endTransmission()
D、Wire.requestFrom()
解析:
在ESP32 for Arduino的I2C类库中,用于主设备向从设备发送读取数据请求的成员函数是Wire.requestFrom()。该函数用于启动一个从设备的数据读取过程,因此选项D是正确的。其他选项的功能如下:
A. Wire.begin() - 用于初始化I2C通信。
B. Wire.transfer() - 用于发送或接收数据。
C. Wire.endTransmission() - 用于结束一个I2C传输。
9、ESP32 for Arduino I2C类库的成员函数beginTransmission(),下列描述正确的是?( )
A、初始化,并作为主设备加入I2C
B、将向从设备发送的数据加入到发送数据队列
C、向从设备发送数据请求
D、将从设备的地址加入到发送数据队列
解析:
ESP32 for Arduino I2C类库的成员函数beginTransmission()的主要作用是将从设备的地址加入到发送数据队列,以便后续的I2C通信。它并不涉及初始化、加入I2C作为主设备、或者将数据加入到发送数据队列的操作。因此,描述正确的是选项D。
10、MPU6050姿态传感器中,用于返回角速度的功能单元是?( )
A、加速度传感器
B、陀螺仪
C、DMP
D、磁力计
解析:
MPU6050姿态传感器中,用于返回角速度的功能单元是陀螺仪。加速度传感器主要用于测量物体的加速度,DMP(数字运动处理器)用于处理和管理传感器数据,而磁力计则用于测量磁场强度,通常用于方向识别。因此,正确答案是B,即陀螺仪。
11、SPI通信,主机向从机发送数据的数据线是?( )
A、SCLK
B、SS
C、MISO
D、MOSI
解析:
在SPI(Serial Peripheral Interface)通信中,主机向从机发送数据的数据线是MOSI(Master Out Slave In)线。因此,正确答案是D。
12、SPI通信,下列选项中,关于数据线SCLK描述正确的是?( )
A、从机向主机发送数据的数据线
B、主机向从机发送片选信号的数据线
C、从机向主机发送时钟信号的数据线
D、主机向从机发送时钟信号的数据线
解析:
在SPI(Serial Peripheral Interface)通信中,数据线SCLK用于主机向从机发送时钟信号。因此,正确答案是D。其他选项描述的是其他类型的信号线或方向不正确。
13、关于步进电机,以下说法中不正确的是?( )
A、步进电机转动是通过PWM控制
B、步进电机转动的速度与脉冲频率成正比
C、步进电机是执行器
D、步进电机是开环控制,但步距误差不会累计
解析:
步进电机转动是通过控制脉冲的数量和方向来实现,而不是通过PWM(脉冲宽度调制)控制。因此,选项A的说法是不正确的。其他选项描述了步进电机的一些基本特性,包括其作为执行器、转动速度与脉冲频率成正比,以及开环控制下步距误差不会累计,这些都是正确的。
14、下列选项中,检测网络环境下设备之间是否连通的命令是?( )
A、ping
B、msconfig
C、ipconfig
D、connect
解析:
在网络环境下,检测设备之间是否连通常用的命令是“ping”。通过这个命令,我们可以测试与远程设备的连接,并获取有关网络连接的信息。因此,正确答案是A。而msconfig用于系统配置,ifconfig(在某些操作系统中)或ipconfig(在Windows中)用于查看或配置网络接口信息,connect命令不是用于检测网络连接的工具。
15、步进电机类库AccelStepper的成员函数中,设定恒速转动时步进电机转动速度的成员函数是?( ) A.AccelStepper.setSpeed() B.AccelStepper.setMaxSpeed() C.AccelStepper.setAcceleration() D.AccelStepper.speed()
A、AccelStepper.setSpeed()
B、AccelStepper.setMaxSpeed()
C、AccelStepper.setAcceleration()
D、AccelStepper.speed()
解析:
在步进电机类库AccelStepper中,用于设定恒速转动时步进电机转动速度的成员函数是AccelStepper.setSpeed()。因此,正确答案是A。其他选项的功能为:setMaxSpeed()用于设置最大速度,setAcceleration()用于设置加速度,speed()通常用于获取当前速度,均不是用于设置恒速转动时步进电机转动速度的成员函数。
16、HTTP请求报文头部的结束符是?( )
A、仅回车符+换行符
B、回车符
C、换行符
D、空行
解析:
HTTP请求报文头部的结束符是回车符(CR)和换行符(LF)的组合,也就是仅回车符+换行符。在HTTP协议中,请求报文通常由请求行、请求头部和请求体组成。请求头部和请求体之间以空行分隔,而请求头部的结束标志就是回车符+换行符的组合。因此,正确答案是A。
17、ESP32 for Arduino 提供的WiFi类库的成员函数中,用于设定ESP32主控板为STA模式的成员函数是?( ) A.WiFi.softSTA() B.WiFi.softAP() C.WiFi.localIP() D.WiFi.begin()
A、WiFi.softSTA()
B、WiFi.softAP()
C、WiFi.localIP()
D、WiFi.begin()
解析:
在ESP32 for Arduino提供的WiFi类库中,用于设定ESP32主控板为STA(Station,即客户端)模式的成员函数是WiFi.begin(),因此选项D是正确的。其他选项的功能与STA模式设置无关。
18、ESP32 主控板与外设模块通过I2C进行通信,部分程序如下,下列选项中,关于参数A说法正确的是?( )
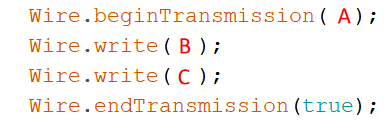
A、参数A是外设模块的I2C地址
B、参数A是外设模块内寄存器的地址
C、参数A是从外设模块中读取的数据
D、参数A是向外设模块写入的数据
解析:
根据题目描述和提供的程序片段,参数A在I2C通信中通常表示的是外设模块的I2C地址。在I2C通信中,每个设备都有一个独特的地址,以便主机能够识别并与该设备进行通信。因此,选项A正确,其他选项如参数A是外设模块内寄存器的地址、从外设模块中读取的数据或向外设模块写入的数据都不是正确的描述。
19、24BJY48步进电机的转动控制,使用0/1表示电源的关闭和导通,当发送给步进电机的控制参数序列为[B1000,B0100,B0010,B0001,B1000]时,步进电机的通电方式是?( )
A、四相单四拍
B、四相双四拍
C、四相单五拍
D、四相双五拍
解析:
步进电机的转动控制通常使用控制参数序列来决定电机的通电方式。在这个问题中,控制参数序列为[B1000,B0100,B0010,B0001,B1000]。根据这个序列,电机依次按照四相单四拍的顺序进行通电。具体来说,每个控制参数代表一个相位的通电状态,其中"B"表示通电状态,"0"表示关闭状态,"1"表示导通状态。因此,根据这个序列,步进电机的通电方式是四相单四拍。
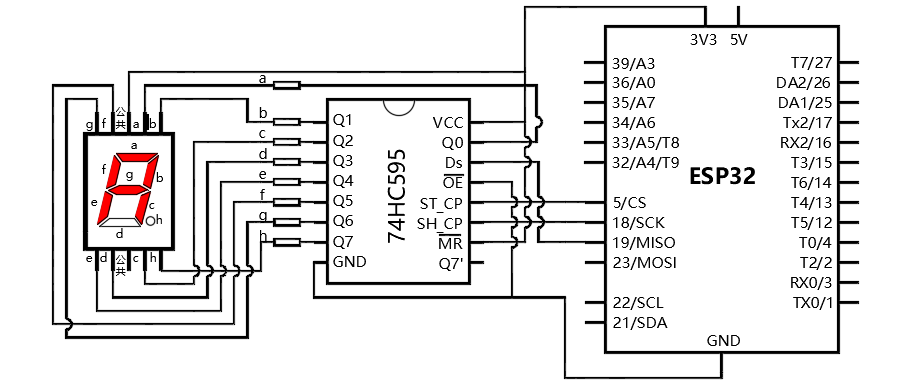
20、一位共阳数码管和74HC595移位寄存器芯片连接如下图所示,数码管显示字符为“A”,使用shiftout函数向74HC595发送数据,下列选项中正确的程序是?( )
A、
B、
C、
D、
解析:
根据题目描述和共阳数码管以及74HC595移位寄存器的工作原理,我们需要发送正确的数据序列以在数码管上显示字符"A"。根据数码管显示的编码和移位寄存器的操作方式,正确的程序应该是先发送高位字节,然后是低位字节。选项D中的程序显示了正确的顺序和编码,因此是正确答案。
二、多选题
21、下列选项中,ESP32 WROOM模组所能提供的通信方式有?( )
A、WiFi
B、I2C
C、CAN
D、SPI
解析:
ESP32 WROOM模组是一款功能丰富的无线通信模块,它提供了多种通信方式以满足不同的应用需求。根据题目给出的选项,该模组能够提供的通信方式包括WiFi、I2C和SPI。因此,正确答案为A、B和D。C选项CAN通信不是ESP32 WROOM模组所支持的通信方式。
22、使用本地计算机进行网页浏览时,下列说法正确的有?( )
A、本地计算机率先发起请求
B、服务器端对本地计算机的请求做出响应
C、网页浏览信息交换模式为请求-响应
D、本地计算机称为客户端
解析:
在使用本地计算机进行网页浏览时,本地计算机率先发起请求,服务器端对本地计算机的请求做出响应,网页浏览信息交换模式为请求-响应,本地计算机称为客户端。因此,选项A、B、C和D都是正确的说法。
23、ESP32 for Arduino SPI类库的成员函数setBitOrder(bitOrder)中,参数bitOrder的选择有?( )
A、MSBFIRST
B、LSBFIRST
C、上升沿
D、下降沿
解析:
在ESP32 for Arduino SPI类库的成员函数setBitOrder(bitOrder)中,参数bitOrder用于设置SPI通信时的位序。常见的位序有两种:MSBFIRST(Most Significant Bit First,高位优先)和LSBFIRST(Least Significant Bit First,低位优先)。因此,正确答案是A和B。选项C“上升沿”和D“下降沿”与ESP32的SPI设置没有直接关系。
24、MPU6050姿态传感器的角速度传感器单元可以设置如下不同的量程,下列选项中关于测量精度说法正确的是?( )
A、测量精度最高的量程是250°/s
B、测量精度最高的量程是2000°/s
C、测量精度最低的量程是250°/s
D、测量精度最低的量程是2000°/s
解析:
对于MPU6050姿态传感器的角速度传感器单元,不同的量程对应不同的测量精度。一般情况下,测量精度最高的量程是较低的速度范围,而测量精度最低的量程是较高的速度范围。因此,选项A和D中的说法是正确的,而选项B和C的说法是不正确的。所以正确答案是AD。
25、HTML文档结构主要包含有?( )
A、标签
B、文本
C、主体
D、头部
解析:
HTML文档结构主要包含头部(Head)和主体(Body)两部分。头部包含了元数据、样式表链接等,而主体是网页内容的实际展示部分,包含文本、图片、链接等。因此,正确答案是C主体和D头部。
三、判断题
26、TCP/IP协议是协议家族的统称,不是指某一特定的协议。( )
A 正确
B 错误
解析:
TCP/IP协议是一个协议家族的统称,包括了许多不同的协议,并不是指某一特定的协议。因此,上述题目中的说法是正确的。
27、IPv6地址长度为128位,由8个段组成。( )
A 正确
B 错误
解析:
IPv6地址的长度是128位,但它不是由8个段组成。IPv6地址通常表示为8组十六进制数,每组由冒号分隔,每组数可以是多个连续的十六进制数。尽管有时IPv6地址可能看起来像是被分成了多个段,但实际上这些段只是表示IPv6地址的特定格式。因此,说IPv6地址由8个段组成是不准确的。
28、SPI通信采取主从模式,每个从设备都有一个唯一的地址。( )
A 正确
B 错误
解析:
SPI(Serial Peripheral Interface)通信确实采取主从模式,但在这种模式中,每个设备并不一定要有一个唯一的地址。在主从模式中,通常会有一个主设备控制通信,并与其他从设备通信。然而,并不是每个从设备都需要一个唯一的地址,这取决于具体的应用场景和设计需求。因此,题目中的说法“每个从设备都有一个唯一的地址”是不准确的。
29、I2C串行通信,主设备发送数据的同时,同步从从设备接收数据。( )
A 正确
B 错误
解析:
I2C(Inter-Integrated Circuit)是一种串行通信协议,用于连接微控制器和其他外围设备。在I2C通信中,主设备(Master)和从设备(Slave)之间的数据传输是半双工的,即数据在同一时刻只能单向传输。因此,主设备不能同时发送数据并从从设备接收数据。所以,这个说法是错误的。
30、HTTP请求GET方法的功能是客户端向服务器端发送更改数据请求。( )
A 正确
B 错误
解析:
HTTP请求中的GET方法主要用于从服务器获取数据,而不是发送更改数据的请求。更改数据通常使用POST、PUT等方法。因此,题目中的描述是错误的。
喵呜刷题:让学习像火箭一样快速,快来微信扫码,体验免费刷题服务,开启你的学习加速器!




