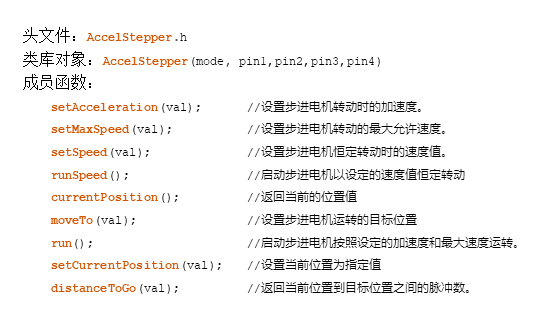
【喵呜刷题小喵解析】:本题要求使用AccelStepper类库来控制步进电机。根据题目给出的头文件和相关类库函数,我们可以创建一个AccelStepper对象来控制步进电机。首先,我们需要包含AccelStepper的头文件,即`#include "AccelStepper.h"`。然后,我们创建一个AccelStepper对象,需要指定步进电机的引脚号、步进类型、驱动类型以及编码器类型。在这个例子中,我们将步进电机的引脚号设置为1,步进类型设置为DRIVER,驱动类型设置为MS5611,编码器类型设置为无编码器。在`setup()`函数中,我们需要设置步进电机的最大速度、加速度以及目标位置。在这个例子中,我们将最大速度设置为100.0,加速度设置为500.0,目标位置设置为1000。在`loop()`函数中,我们调用`stepper.run()`函数来运行步进电机,使其向目标位置移动。注意,这个答案只是一个简单的示例,具体的实现可能会因为具体的需求和硬件配置而有所不同。例如,步进电机的引脚号、步进类型、驱动类型以及编码器类型都需要根据具体的硬件配置来设置。此外,还需要注意在代码中处理可能出现的异常情况,比如步进电机卡住、电源中断等情况。